Moottorin tarkkuuden, moottorin ohjauksen ja moottorin suorituskyvyn parantamiseksi suunnittelijat voivat nyt käyttää induktiivisia asentoantureita, jotka tarjoavat uuden tason paikannustarkkuuden.
Moottorin tarkkuuden, moottorin ohjauksen ja moottorin suorituskyvyn parantamiseksi suunnittelijat voivat nyt käyttää induktiivisia asentoantureita, jotka tarjoavat uuden tason paikannustarkkuuden.
|
Artikkelin kirjoittaja Alessandro Maggioni on EMEA-alueen markkinointijohtaja onsemin ASG-ryhmässä (Advanced Solutions Group). Hänellä on yli 18 vuoden kokemus puolijohdealalta. Ura alkoi sovellusinsinöörinä, mutta viime vuodet Alessandro on keskittynyt markkinointiin. |
Jatkuva edistyminen tuotannosta kuljetuksiin ja viihteeseen riippuu usein koneidemme suorituskyvyn parantamiseen ja kykyyn hallita niitä entistä tarkemmin.
Monien nykyaikaisten koneiden ytimessä on ainakin yksi moottori. Eräs näkökohta robottien, hissien, autojen, sähkötyökalujen ja muiden parantamisessa on niiden moottoreiden entistä tarkempi ohjaaminen. Moottorin suorituskyky riippuu tarkkuusohjauksesta ja tarkka moottorinohjaus riippuu moottorin sijainnin/asennon tarkasta havaitsemisesta. Tarkka tunnistus riippuu jatkuvasti tarkentuvasta anturiteknologiasta.
Enkooderit
Magneettiset ja optiset enkooderit hyödyntävät moottorin asennon muutosten ja sen nopeuden välistä suhdetta.
Magneettisia koodereita on monenlaisia, mutta ne kaikki perustuvat saman ilmiön muunnelmiin. Moottori on varustettu tavalla tai toisella yhdellä tai useammalla magneetilla. Kun nämä magneetit liikkuvat suhteessa magneettitunnistimeen, magneettikenttä muuttuu suhteessa niiden suhteelliseen liikkeeseen.
Erilaisten magneettienkooderien resoluutio vaihtelee ja voi joissain tapauksissa olla melko alhainen mitaten vain muutamaa sataa pulssia kierrosta kohti (PPR). Suurempi tarkkuus riippuu tarkasta valmistuksesta. Koko ja paino vaihtelevat tyypin mukaan. Myös äärimmäiset lämpötilat voivat vaikuttaa niihin haitallisesti.
Yksi magneettisten antureiden haittapuoli on, että sovelluksissa, jotka ovat alttiina sähkömagneettisille EMI-häiriöille, ne saattavat olla epäluotettavia ja jopa täysin käyttökelvottomia.
Optiset kooderit havaitsevat valopulsseja. Perustoteutuksessa moottori varustetaan levymäisellä ritilällä. Valodiodit havaitsevat valopulsseja ritilän päällä tai sen läpi sen pyöriessä (valopulssien sarja muodostaa "koodin", mistä termi "optinen kooderi" tulee). Tekniikka määrittää sekä pyörimisnopeuden että moottorin asennon.
Optiset kooderit eivät läpäise magneettikenttiä. Niillä voi olla korkea resoluutio ja hyvä tarkkuus, mutta niiden suorituskyky voi riippua huolellisesta asennuksesta. Optiset kooderit voivat vaarantua helposti ympäristön epäpuhtauksien, kuten lian, noen tai jopa kosteuden, vaikutuksesta. Myös äärimmäiset lämpötilat voivat vaikuttaa haitallisesti niihin. Millä tahansa näistä antureista suuret nopeudet saavutetaan tyypillisesti tarkkuuden kustannuksella, mikä aina maksaa enemmän.
Induktiiviset anturit
Kolmas anturityyppi, jota käytetään moottoreiden yhteydessä, ovat induktiiviset anturit. Vaikka induktioanturit perustuvat itse asiassa magneetteihin, ne eivät mittaa muutoksia magneettikentässä. Sen sijaan mitataan virtaa, indusoitunutta virtaa.
Magneettitunnistin tunnistaa hammaspyörien pyörimisen. Kun hammaspyörän hampaat ohittavat anturin, se muodostaa vaihtelevan vuon, joka indusoi anturiin suhteellisen jännitteen. Jännite voidaan korreloida pyörimisnopeuden ja -suunnan kanssa.
Induktiivisia antureita on käytetty noin vuosisadan ajan. Induktiiviset asentoanturiratkaisut eivät yleensä ole herkkiä tärinälle, lämpötilavaihteluille tai ympäristön epäpuhtauksille. Mekaanisesti ne ovat yleensä yksinkertaisempia ja siksi luotettavampia.
Kahden viime vuosikymmenen aikana induktiiviset anturit ovat tulleet yhä suositummiksi automarkkinoilla. Autoissa käytettävät induktiiviset anturit on suunniteltu edullisiksi ja erittäin luotettaviksi. Ne myös sattuvat olemaan hitaita ja epätarkkoja.
Tämä sopi aiemmin tiettyjen sovellusten tarpeisiin, mutta induktiiviset anturit pystyivät saavuttamaan paremman suorituskyvyn.
Kaksoisinduktiivinen pyörivä anturi
Kaksoisinduktiivinen pyörivä anturi on uusi muunnelma induktiivisesta anturista. Nämä uudet induktiiviset asentoanturit ovat sekä nopeita että erittäin tarkkoja.
Onsemin kaksoisinduktiivinen asentoanturi koostuu kahdesta painetusta piirilevystä (PCB). Toinen on roottori, jossa on kaksi painettua kelaa. Toinen on staattori, jossa on painetut induktorit ja kooderipiiri.
Laitteen tarkkuus on parempi kuin +/-50 kaarisekuntia 38 millimetrin anturilla. Se on täysin tarkka jopa 6000 kierrokseen minuutissa, vaikka se voikin toimia jopa 100 000 RPM:n maksiminopeudella. Siinä on 20-bittinen yksikierrosresoluutiolähtö ja 24-bittinen monikierrosresoluutiolähtö.

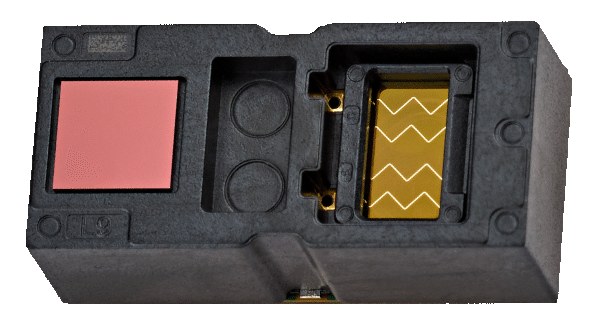
Kuva 1: onsemin asentoanturi NCS32100.
NCS32100-piiri on absoluuttinen enkooderi (verrattuna ns. inkrementtianturiin), mikä tarkoittaa, että se voi tarjota sijaintitietoja myös silloin, kun roottori ei liiku.
Vakiomoduulissa on sulautettu mikro-ohjain (MCU) laiteohjelmistolla. Ohjain on ohjelmoitava Arm-M0 ja se tuottaa paikan ja nopeuden raa´an analogiasignaalin sijaan. Moduulin konfigurointiominaisuudet mahdollistavat liittämisen useisiin induktiivisiin anturikuvioihin, ja se tarjoaa erilaisia digitaalisia signaalilähtöjä.
Lähestymistapa on mekaanisesti yksinkertainen, ja siinä on pienempi määrä komponentteja. Se vaatii myös minimaalisen määrän ulkoisia komponentteja (esim. ohituskondensaattori, virityskondensaattori jne.). Anturissa on plug-and-play-ominaisuudet, se on suhteellisen helppo kalibroida, ja siinä on virheenkorjaus/diagnostiikka, joten se on helppo asentaa ja käyttää. Kuten muutkin induktiiviset anturit, se on vankka, turvallinen ja luotettava. Se tarjotaan vakiomoduulina, mutta perusrakenne sopii myös muihin kokoonpanoihin.
Integroitu ratkaisu on suunniteltu teollisiin sovelluksiin ja niiden vaatimuksiin. Kaksoisinduktiivista asentoanturia voidaan käyttää paikoissa, joissa tällä hetkellä käytetään keski- ja huippuluokan optisia koodereita, ja sovelluksissa, kuten robotiikassa, teollisuuskäytöissä, tehdasautomaatiojärjestelmissä ja monenlaisissa teollisuuskoneissa.
Aina kun suunnittelija arvioi anturivaihtoehtoja, on tärkeää paitsi täyttää sovelluksen toiminnalliset vaatimukset, myös ottaa huomioon sovelluksen pitkän aikavälin elinvoimaisuus. Onsemin pyörivä kaksoisinduktiivinen pyöriä asentoanturi vähentää komponenttien lukumäärää, pidentää käyttöikää ja yksinkertaistaa kalibrointia, mikä merkitsee alhaisempia kokonaiskustannuksia.









 IGBT on pitkään ollut teollisuuden tukipilari, joka yhdistää suuren tehon yksinkertaisiin ohjaustapoihin. Uuden polven IGBT7-teknologia on saanut merkittäviä parannuksia verrattuna aiempiin sukupolviin: alhaisempi myötäjännite, suuremmat nimellisvirrat, ylikuormituskapasiteetti 175°C asti, tarkempi dv/dt-säätö ja laadukkaampi suojadiodi.
IGBT on pitkään ollut teollisuuden tukipilari, joka yhdistää suuren tehon yksinkertaisiin ohjaustapoihin. Uuden polven IGBT7-teknologia on saanut merkittäviä parannuksia verrattuna aiempiin sukupolviin: alhaisempi myötäjännite, suuremmat nimellisvirrat, ylikuormituskapasiteetti 175°C asti, tarkempi dv/dt-säätö ja laadukkaampi suojadiodi.