










 Monessa konenäkösovelluksessa vaaditaan erilaisten kohteiden etäisyyksien tarkkaa mittaamista. Tämä artikkeli tarjoaa yleiskatsauksen jatkuvan säteilyn (Continous Wave) CMOS-pohjaisen ToF-kamerajärjestelmän tekniikkaan ja sen eduista perinteisiin 3D-kuvausratkaisuihin verrattuna.
Monessa konenäkösovelluksessa vaaditaan erilaisten kohteiden etäisyyksien tarkkaa mittaamista. Tämä artikkeli tarjoaa yleiskatsauksen jatkuvan säteilyn (Continous Wave) CMOS-pohjaisen ToF-kamerajärjestelmän tekniikkaan ja sen eduista perinteisiin 3D-kuvausratkaisuihin verrattuna.
|
Artikkelin ovat kirjoittaneet järjestelmäsuunnittelija Paul O’Sullivan ja järjestelmäsuunnittelun päällikkö Nicolas Le Dortz, jotka työskentelevät Analog Devicesilla. O´Sullivan tuli ADI:n palvelukseen vuonna 2004. Kulutussovellusten edistyneiden projektien parissa hän on työskennellyt vuodesta 2016. Hänellä on tutkinnot Corkin ja Limerickin yliopistoista. Le Dortz vastaa ADI:lla ToF-järjestelmien suunnittelusta. Hänellä on elektroniikkainsinöörin tutkinto Ranskan polyteknisestä korkeakoulusta sekä Ecole-Centrale Supelecista ja mikroelektroniikan tutkinto KTH:sta Ruotsissa. Hän toimi tutkijana Berkeleyn yliopistossa 2013-2014. |
Monet konenäkösovellukset vaativat nyt korkearesoluutioisia 3D-syvyyskuvia korvatakseen tai täydentääkseen tavallista 2D-kuvausta. Nämä ratkaisut perustuvat 3D-kameraan, joka tarjoaa luotettavaa syvyystietoa turvallisuuden takaamiseksi, etenkin koneiden toimiessa lähellä ihmistä. Kameroiden on myös tarjottava luotettavaa syvyystietoa haastavissa ympäristöissä, kuten suurissa tiloissa, joissa on erittäin heijastavia pintoja. Sama pätee muiden liikkuvien kohteiden lähellä.
Monet tuotteet ovat tähän mennessä käyttäneet matalaresoluutioisia etäisyysmittarin tyyppisiä ratkaisuja antamaan syvyystietoja 2D-kuvan täydentämiseksi. Tällä lähestymistavalla on kuitenkin monia rajoituksia. CW CMOS ToF -kamerat tarjoavat markkinoiden tehokkaimpia ratkaisuja sovelluksille, jotka hyötyvät korkeamman resoluution 3D-syvyystiedoista. Joitakin korkearesoluutioisen CW ToF -anturitekniikan mahdollistamia järjestelmän ominaisuuksia on kuvattu yksityiskohtaisemmin taulukossa 1. Nämä järjestelmän ominaisuudet soveltuvat myös kuluttajalaitteisiin esimerkiksi videoiden bokeh-efektin tuottamisessa, kasvojentunnistuksessa ja mittaussovelluksiin, sekä autoissa vaikkapa valvomaan kuljettajan vireystilaa.
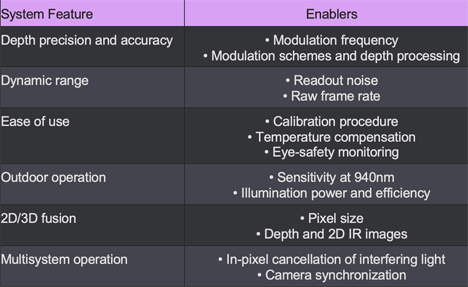
Taulukko 1. Jatkuvan lentoajan mittaamiseen perustuvien järjestelmien ominaisuuksia.
ToF-kameran yleiskuva
Syvyyskamera on kamera, jossa jokainen pikseli tuottaa kameran ja kohteen välisen etäisyyden. Yksi syvyyden mittaustekniikka on laskea aika, joka kuluu valon kulkeutumiseen kameran valonlähteestä heijastavalle pinnalle ja takaisin kameraan. Tätä matka-aikaa kutsutaan yleisesti lentoajaksi (ToF, time-of-flight).
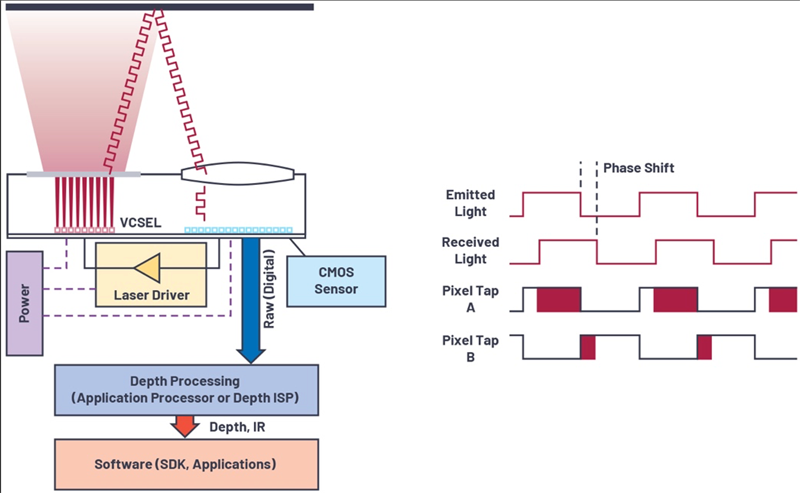
Kuva 1. Yleiskuva ToF-anturiteknologiasta.
ToF-kamera koostuu useista elementeistä (katso kuva 1), mukaan lukien:
- valonlähde - kuten VCSEl eli pintaemittoiva pystykaviteettilaser tai reunaemittoiva laserdiodi - joka säteilee valoa lähellä infrapuna-aluetta. Yleisimmin käytetyt aallonpituudet ovat 850 ja 940 nanometriä. Valonlähde on yleensä diffuusi- eli hajavalonlähde, joka valonsäteen hajonnalla valaisee näkymän tai kohteen kameran edessä.
- laserohjain, joka moduloi valonlähteen lähettämän valon voimakkuutta.
- pikseliryhmän muodostama anturi eli CMOS-kenno, joka kerää kohteesta palaavan valon ja tuottaa arvot jokaiselle pikselille.
- linssi, joka kohdistaa palaavan valon anturille.
- kaistanpäästösuodin, joka sijaitsee linssin yhteydessä ja suodattaa pois valonlähteen kapeakaistaisen valon ulkopuoliset aallonpituudet.
- prosessointialgoritmi, joka muuntaa anturin raakakehykset syvyyskuviksi tai pistepilviksi.
- ToF-kameran valon säätämiseen voidaan käyttää useita lähestymistapoja. Yksinkertainen tapa on käyttää jatkuvaa aaltomodulaatiota - esimerkiksi neliöaaltomodulaatiota 50 %:n pulssisuhteella. Käytännössä laseraaltomuoto on harvoin täydellinen neliöaalto ja saattaa näyttää enemmän siniaallolta. Neliömäinen laseraaltomuoto tuottaa paremman signaali-kohinasuhteen tietyllä optisella teholla, mutta aiheuttaa myös epälineaarisia syvyysvirheitä korkeataajuisten harmonisten yliaaltojen vuoksi.
Jatkuvan aaltomuodon ToF-kamera mittaa lähetetyn signaalin ja paluusignaalin välistä aikaeroa (td) arvioimalla vaihesiirron ü = 2πftd näiden kahden signaalin perusaaltojen välillä. Syvyys voidaan arvioida vaihesiirrosta (ü) ja valonnopeudesta (c) käyttämällä laskentakaavaa:

jossa fmod on modulointitaajuus.
Anturissa oleva kellogeneraattori ohjaa täydentäviä pikselikelloja, jotka vastaavasti ohjaavat varausten kerääntymistä kahdessa varauksen tallennuselementissä (Tap A ja Tap B), sekä lasermodulaatiosignaalia laserohjaimelle. Palautuvan moduloidun valon vaihe voidaan mitata suhteessa pikselikellojen vaiheeseen (katso kuvan 1 oikea puoli). Varausero Tap A:n ja Tap B:n välillä pikselissä on verrannollinen palaavan moduloidun valon intensiteettiin ja palaavan moduloidun valon vaiheeseen suhteessa pikselikelloon.
Mittaus suoritetaan useilla suhteellisilla vaiheilla pikselikellon ja lasermodulaatiosignaalin välillä. Nämä mittaukset yhdistetään moduloidun paluusignaalin perusaallon vaiheen määrittämiseksi. Perusaallon vaiheen avulla voidaan laskea aika, joka valolla kuluu kulkemiseen valonlähteestä tarkkailtavaan kohteeseen ja takaisin anturipikseliin.
Korkeiden modulaatiotaajuuksien edut
Käytännössä fotonien raekohina, lukupiirin kohina ja monitiehäiriöt voivat aiheuttaa virheitä vaihemittauksessa. Korkea modulaatiotaajuus vähentää näiden virheiden vaikutusta syvyysarviointiin.
Tämä on helppo ymmärtää yksinkertaisella esimerkillä, jossa on vaihevirhe üçü - eli anturin mittaama vaihe on ü = ü + üçü. Syvyysvirhe on sitten:

Siksi syvyysvirhe on kääntäen verrannollinen modulaatiotaajuuteen fmod. Tämä on havainnollistettu graafisesti kuvassa 2.
Tämä yksinkertainen kaava selittää suurelta osin, miksi korkean modulaatiotaajuuden omaavissa ToF-kameroissa on pienempi syvyyskohina ja pienemmät syvyysvirheet kuin pienemmällä modulaatiotaajuudella toimivissa ToF-kameroissa.
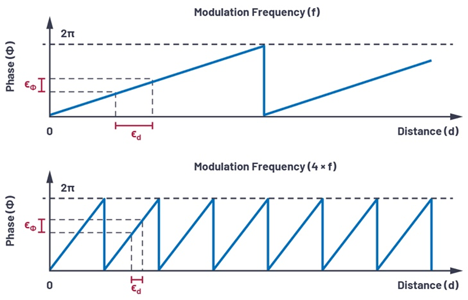
Kuva 2. Vaihevirheen vaikutus etäisyyden arviointiin.
Eräs suuren modulaatiotaajuuden käytön haittapuoli on, että vaihe kiertyy nopeammin, eli tarkasti mitattava alue on lyhyempi. Yleinen tapa kiertää tämä rajoitus on käyttää useita modulaatiotaajuuksia, jotka kiertävät eri nopeuksilla. Alin modulaatiotaajuus tarjoaa laajan alueen ilman epäselvyyttä, mutta aiheuttaa suuremmat syvyysvirheet (kohina, monitiehäiriö jne.), kun taas korkeampia modulaatiotaajuuksia käytetään samanaikaisesti vähentämään syvyysvirheitä. Esimerkki tästä menetelmästä, jossa on kolme erilaista modulaatiotaajuutta, on esitetty kuvassa 3. Lopullinen syvyysarvio lasketaan painottamalla eri modulaatiotaajuuksien vaihearviot, jolloin korkeammille modulaatiotaajuuksille on annettu suurempi painotus.
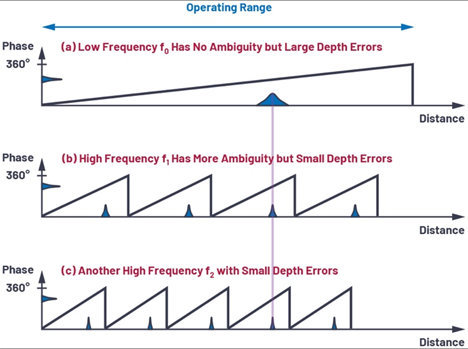
Kuva 3. Monitaajuinen vaihemittaus.
Jos painotukset kullekin taajuudelle valitaan optimaalisesti, syvyyskohina on kääntäen verrannollinen järjestelmässä valittujen modulaatiotaajuuksien neliölliseen keskiarvoon (rms). Jatkuvan syvyyskohina-alueen saavuttamiseksi modulaatiotaajuuksien lisääminen mahdollistaa integrointiajan tai valaistustehon vähentämisen.
Muita suorituskyvyn kannalta kriittisiä järjestelmätekijöitä
Suorituskykyistä ToF-kameraa kehitettäessä on otettava huomioon useita järjestelmäominaisuuksia, joista joitain käsitellään lyhyesti seuraavassa.
Kuva-anturi
Kuva-anturi on avainkomponentti ToF-kamerassa. Useimpien syvyyden arvioinnin epäideaalisuuksien (esimerkiksi bias, syvyyskohina ja monitieartefaktit) vaikutukset vähenevät, kun järjestelmän keskimääräinen modulaatiotaajuus kasvaa. Sen vuoksi on tärkeää, että anturilla on korkea demodulaatiokontrasti (kyky erottaa fotoelektroneja Tap A:n ja Tap B:n välillä) korkealla modulaatiotaajuudella (satoja megahertsejä).
Anturilla on myös oltava korkea kvanttihyötysuhde (QE) lähi-infrapuna-alueella (esimerkiksi 850 nm ja 940 nm), jotta tarvitaan vähemmän optista tehoa valoelektronien tuottamiseen pikselissä. Lopuksi alhainen lukukohina auttaa kameran dynaamisella alueella mahdollistamalla heikon paluusignaalin havaitsemisen (kaukaa tai matalan heijastavuuden kohteista).
Valaistus
Laserohjain moduloi valonlähdettä (esimerkiksi VCSEL) korkealla modulaatiotaajuudella. Hyötysignaalin maksimoimiseksi pikselissä määrätyllä optisella teholla, optisella aaltomuodolla on oltava nopeat nousu- ja laskuajat puhtailla reunoilla. Laserin, laserohjaimen ja piirilevyasettelun yhdistelmä valaistusalijärjestelmässä ovat kaikki kriittisiä tämän saavuttamiseksi. Modulaatioaaltomuodon perusaallon amplitudin maksimoimiseksi täytyy karakterisoida sekä optimaalinen optinen teho sekä optimaalinen pulssisuhde. Lopuksi optinen teho on myös toimitettava turvallisesti joillakin turvamekanismeilla, jotka on sisäänrakennettu laserohjaimen ja järjestelmän tasolla. Luokan 1 silmänsuojauksen turvarajoja on aina noudatettava.
Optiikka
Optiikalla on keskeinen rooli ToF-kameroissa. ToF-kameroilla on tiettyjä luontaisia ominaisuuksia, jotka ohjaavat erityisiä optisia vaatimuksia. Ensinnäkin valonlähteen valaistuskentän tulee vastata linssin näkökenttää optimaalisen tehokkuuden saavuttamiseksi. On myös tärkeää, että itse objektiivissa on suuri aukko (pieni f/#) valonkeräystehokkuuden parantamiseksi. Suuret aukot voivat johtaa muihin kompromisseihin vinjetoinnin, matalan syväterävyyden ja objektiivin suunnittelun monimutkaisuuden suhteen. Matala pääsädekulman linssirakenne voi myös auttaa vähentämään kaistanpäästösuotimen kaistanleveyttä, mikä parantaa ympäristön valon vaimentamista ja parantaa siten suorituskykyä ulkona.
Optinen alijärjestelmä tulee optimoida myös haluttua toiminta-aallonpituutta varten (esimerkiksi heijastuksenestopinnoitteet, kaistanpäästösuotimen suunnittelu, linssin suunnittelu) suoritustehon maksimoimiseksi ja hajavalon minimoimiseksi. On myös monia mekaanisia vaatimuksia sen varmistamiseksi, että optinen kohdistus on loppusovelluksen haluttujen toleranssirajojen sisällä.
Tehonhallinta
Tehonhallinta on myös erittäin tärkeää korkean suorituskyvyn 3D ToF -kameramoduulien suunnittelussa. Lasermodulaatio ja pikselimodulaatio synnyttävät korkeiden huippuvirtojen lyhyitä purskeita, mikä asettaa rajoituksia tehonhallintaratkaisulle. Anturin integroitujen piirien (IC) tasolla on joitakin ominaisuuksia, jotka voivat auttaa vähentämään kuvapiirin huippuvirrankulutusta. On myös virranhallintatekniikoita, joita voidaan soveltaa järjestelmätasolla virtalähteen (esimerkiksi akun tai USB:n) vaatimusten helpottamiseksi. Tärkeimmät analogiset syöttölaitteet ToF-anturille vaativat tyypillisesti jännitteensäätimen, jolla on hyvä transienttivaste ja matala kohina.
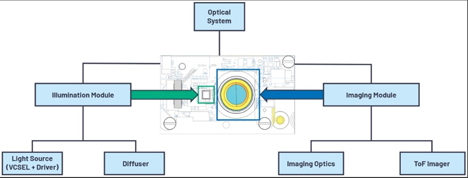
Kuva 4. Optisen järjestelmän arkkitehtuuri.
Syvyysprosessoinnin algoritmi
Toinen suuri osa järjestelmätason suunnittelua on syvyysprosessoinnin algoritmi. ToF-kuvasensori tuottaa raakapikselidataa, josta vaihetiedot on poimittava. Tämä toiminto vaatii erilaisia vaiheita, jotka sisältävät kohinan suodatuksen ja vaiheen purkamisen. Vaiheenpurkamislohkon tulos on mittaus matkasta, jonka valo kulkee laserista kohtaukseen ja takaisin pikseliin, jota usein kutsutaan etäisyydeksi tai säteittäisetäisyydeksi.
Säteittäinen etäisyys muunnetaan yleensä pistepilvi-informaatioksi, joka esittää tietyn pikselin informaatiota sen reaalimaailman koordinaateilla (X,Y,Z). Usein loppusovellukset käyttävät vain Z- eli syvyyskarttaa täyden pistepilven sijaan. Säteittäisen etäisyyden muuntaminen pistepilveksi edellyttää linssin ominaispiirteiden ja vääristymäparametrien tuntemista. Nämä parametrit arvioidaan kameramoduulin geometrisen kalibroinnin aikana. Syvyysprosessoinnin algoritmi voi myös tulostaa muita tietoja, kuten aktiivisia kirkkauskuvia (laserin paluusignaalin amplitudi), passiivisia 2D-infrapunakuvia ja luottamustasoja, joita kaikkia voidaan käyttää loppusovelluksissa. Syvyysprosessointi voidaan tehdä itse kameramoduulissa tai isäntäprosessorissa jossain muualla järjestelmässä.
Taulukossa 2 on esitetty yleiskatsaus tässä artikkelissa käsitellyistä järjestelmätason osista.
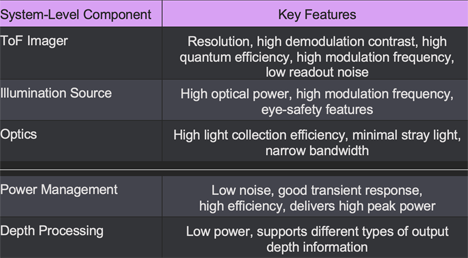
Taulukko 2. 3D-ToF-kameran järjestelmätason komponentit.
Johtopäätös
Jatkuvaan aaltomodulaatioon perustuvat ToF-kamerat ovat tehokas ratkaisu, joka tarjoaa korkean syvyystarkkuuden 3d-sovelluksiin. On monia tekijöitä, jotka on huomioitava parhaan suoritustason varmistamiseksi. Modulaatiotaajuus, demodulaation kontrasti, kvanttihyötysuhde ja mittauskohina sanelevat suorituskyvyn kuvakennon tasolla. Myös järjestelmätason tekijät, kuten valaistuksen alijärjestelmä, optinen suunnittelu, tehonhallinta ja syvyyskäsittelyalgoritmit vaikuttavat lopputulokseen. Kaikki nämä järjestelmätason komponentit ovat kriittisiä tarkimman 3D ToF -mittauksen saavuttamiseksi.
Lisätietoja ADI:n ToF-tuotetarjonnasta löytyy täältä.
 Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.
Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.


















