











 Ympäristön kolmiulotteinen havainnointi yleistyy monilla käyttöalueilla älykännyköistä ja autoista teollisuuden sovelluksiin. Yksi havainnointiin soveltuva menetelmä on lidar-järjestelmiä hyödyntävä ToF-menetelmä (Time-of-Flight). Se mahdollistaa ihmisten ja esineiden sijainnin, muodon ja liikkeen havainnoinnin.
Ympäristön kolmiulotteinen havainnointi yleistyy monilla käyttöalueilla älykännyköistä ja autoista teollisuuden sovelluksiin. Yksi havainnointiin soveltuva menetelmä on lidar-järjestelmiä hyödyntävä ToF-menetelmä (Time-of-Flight). Se mahdollistaa ihmisten ja esineiden sijainnin, muodon ja liikkeen havainnoinnin.
|
Artikkelin kirjoittaja Alain Bruno Kamwa toimii Rutronikilla optotuotteiden |
 myyntipäällikkönä.
myyntipäällikkönä.Lidarin perusperiaate on yksinkertainen: valolähde lähettää valonsäteitä, jotka heijastuvat ympäristöstä. Vastaava TOF-kamera kuvaa heijastuneen valon ja etäisyys lasketaan tunnetun valonnopeuden ja mitatun valon matka-ajan perusteella. Valittavissa on kaksi erilaista lähestymistapaa: epäsuora ja suora. Epäsuorassa iToF (indirect ToF) -menetelmässä valolähde moduloidaan ja heijastuneen valon vaihe-ero mitataan. Koska tämä menetelmä kestää suhteellisen hyvin ryömintää sisäisessä aikamittauksessa, soveltuu se pääasiassa lyhyille etäisyyksille.
Suorassa dToF (direct ToF) -menetelmässä anturi mittaa ajan suoraan edellä kuvatun mukaisesti. Lidar on avainasemassa dToF-menetelmässä. Tutkan tapaan se on havainnointiin ja etäisyydenmääritykseen (DAR, Detection and Ranging) perustuva menetelmä, jossa lidar käyttää ilmaisussa valoaaltoja, kun tutkassa käytetään radioaaltoja. Lidar-antureissa oleva pulssilaserdiodi lähettää valopulssin, johon perustuen määritetään anturin ja valon tiellä olevan esteen välinen etäisyys. Tässä käytetään erittäin tarkkaa ajastusta. Pienilläkin muutoksilla voi olla merkittävä vaikutus lyhyillä etäisyyksillä, mistä syystä lidar soveltuu parhaiten keskipitkille ja pitkille yli sadan metrin etäisyyksille.
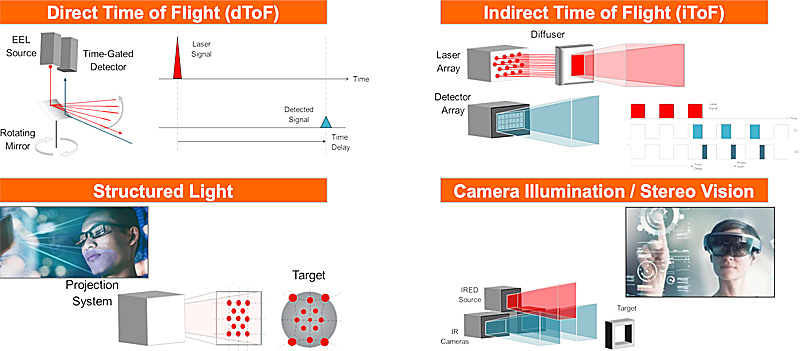
Valon ilmaisuun ja etäisyysmittaukseen on tarjolla erilaisia mittaustekniikoita.
Suuri näköalue ja resoluutio
Laserdiodia käytetään lidar-anturissa valolähteenä. Koska sen tuottaa hyvin kapean ja erittäin tarkasti kohdistettavan valonsäteen, vain samaa kokoluokkaa olevien pienten pisteiden etäisyys voidaan mitata. Tämä ei riitä 3D-ilmaisussa, jossa edellytetään kasvojen tunnistamista, kuljettajan avustamista tai autonomista ajamista. On olemassa monia ratkaisuja, joilla voidaan laajentaa havainnointialuetta eli näkökenttää (FOV, Field of View).
Flash-lidaria käyttämällä valonsäde hajotetaan optiikan avulla, jolloin lähetyskulma laajenee. Tästä seuraa kuitenkin diffuusiota ja huomattavasti heikompaa valoa. Skannaavalla lidar-tekniikalla nämä ongelmat poistuvat. Siinä liikuteltavilla mikropeileillä valonsädettä ohjataan havainnoitavalla FOV-alueella skannausta muistuttavaa prosessia käyttäen. Skannaavia lidar-antureita ei voida kuitenkaan käyttää ajoneuvoissa. Ne ovat kooltaan suuria mittojen ollessa luokkaa 10,5 x 6 x 10 senttimetriä eivätkä liikuteltavat peilit välttämättä kestä kulkuneuvoissa vaikuttavia värähtelyjä, iskuja, kosteutta ja äärimmäisiä lämpötiloja.
Puolijohdekomponentteina toteutettavat lidar-anturit ovat kooltaan pienempiä ja kestävämpiä. Niissä puolijohteita käytetään mekaanisten komponenttien sijaan ohjaamaan valonsädettä. Käytettäessä lidar-antureissa MEMS-pohjaisia peilejä mikropeilien muodostamat matriisit saadaan liikkumaan edestakaisin kahden asennon välillä useita tuhansia kertoja sekunnissa sähköstaattisen kentän vaikutuksesta.
Valolähteeksi IRED, EEL tai VCSEL
Itse valolähde koostuu jostain seuraavista: infrapunaledeistä (IRED), reunasäteilevistä lasereista (EEL) tai pystysuoraan pintasäteilevistä lasereista (VCSEL).
IRED- ja EEL-diodeja käytetään monissa sovelluksissa. IRED:n suurimmat edut ovat tasainen valontuotto ja suuri tehotiheys. Lisäksi ne ovat suhteellisen edullisia hinnaltaan ja helposti asennettavia. Sen sijaan EEL:t puolestaan tuottavat suuren valovoiman, tehon ja hyötysuhteen, jolloin pidemmät etäisyydet ovat hyödynnettävissä.
VCSEL-diodien etuina on IRED:ien tavoin helppo asennettavuus ja EEL:ille ominaiset spektrin leveys ja nopeus. Niiden tehotiheys on tällä hetkellä IRED:n ja EEL:n välillä. Vaikka VCSEL-laserit vaativat hieman isomman tilan kuin EEL-laserit, sitä kompensoivat niiden tarjoamat edut tietyissä sovelluskohteissa. Säteilyominaisuuksien ansiosta VCSEL-laserit ovat riittävän laadukkaita flash lidar -järjestelmiin ja myös niiden aallonpituus pysyy hyvin vakaana lämpötilan vaihteluista huolimatta.
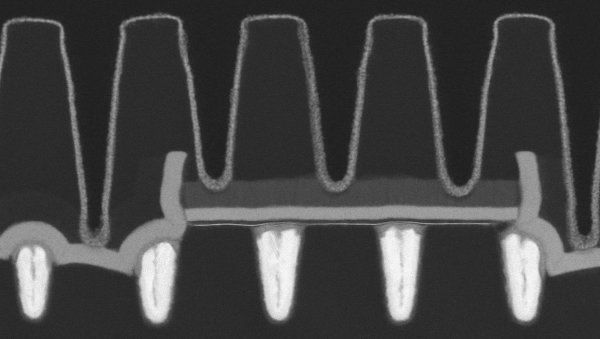
VCSEL:n lasersäteen muodostava resonaattori koostuu kahdesta kiekkotasoon rinnakkain asennetusta Bragg-peilistä. Itse peilit käsittävät useita kerroksia saavuttaen yli 99-prosenttisen heijastuksen ja yhdessä peilien planaaritekniikan kanssa laadultaan erinomaisen kehämäisen säteen, jolloin sädekimpun divergenssi ja kynnysvirta ovat pieniä. Tämän seurauksena ei tarvita lisä- eikä ulkoista optiikkaa kuten perinteisten reunasäteilevien komponenttien yhteydessä tarvitaan. Edellä mainitun rakenteen ansiosta VCSEL:t kestävät hyvin myös mekaanista tärinää. Siitä huolimatta niiden fokusointiominaisuudet ovat hyvät, ne ovat helposti liitettävissä kuituyhteyksiin ja ne kuluttavat vähän tehoa.
EEL-laser on yleensä valinta dTOF-sovelluksiin, jotka edellyttävät suurta tehotiheyttä yli 200 metrin etäisyyksiä mitattaessa. Esimerkiksi AMS Osram tarjoaa runsaasti eri kotelovaihtoehtoja (TO, muovi, SMT) ja useita teholuokkia EEL-valikoimassaan. Yhtiön mukaan tarjolla on keskimääräiseltä teholtaan markkinoilla hyvin kilpailukykyiset EEL-laserit, jotka soveltuvat hyvin ladontakone- ja sulatusjuotosasennuksiin.
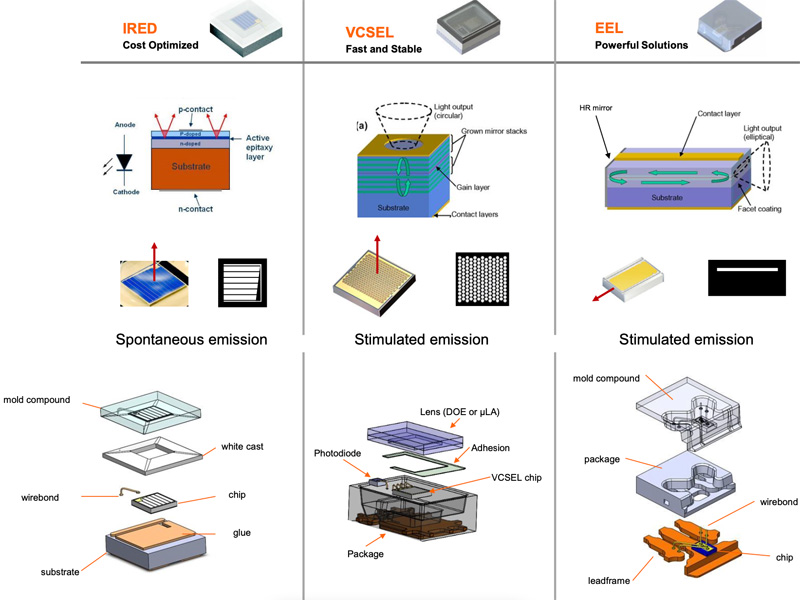
Tehokkaan infrapunaledlaserin, VCSEL-laserin ja reunasäteilevän EEL-laserin piiriteknologioiden ja kotelointien vertailu.
Lyhyempien etäisyyksien 3D-anturisovelluksiin AMS Osram on kehittänyt infrapunalasereista koostuvan Bidos-tuoteperheen. Siihen kuuluu VCSEL-komponentteja, joiden teho voi olla jopa sata wattia ja aallonpituus 850 tai 940 nanometriä.
940 nanometrin VCSEL-tehomatriisi tuottaa kolmen watin optisen lähtötehon, jonka nousu- ja laskuajat ovat 0,5 nanosekuntia. Integroitu ilmaisinvalodiodi on kalibroitavissa sekä optisen lähtötehon että automaattisen tehonohjauksen mukaan ja siinä on ilmaisu laserin turvallisuuteen liittyvien ongelmien kuten linssin putoamisen tai ihokontaktin osalta, joita tulee aina välttää lasersovelluksissa.
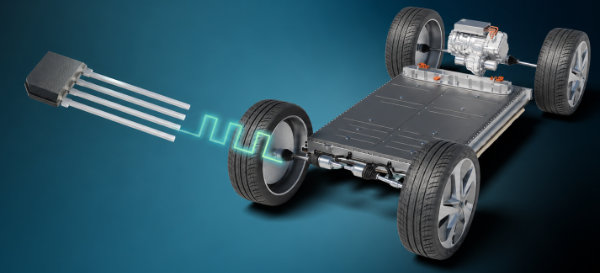
Autonomisen ajamisen tehokkaat laserit
Autonomisissa ajoneuvoissa turvallisuus on tärkein tekijä. Tarvitaan suurella toimintasäteellä ja nopeudella toimivia lidar-järjestelmiä, jotka edellyttävät erittäin suorituskykyisiä lasereita. AMS Osramin tarjonnassa on kaksi uutta EEL-laseria 3D-järjestelmiin, joissa vaaditaan suurta resoluutiota ja sen edellyttämiä kehittyneitä mittaussignaaleja, jotka ovat kriittisen tärkeitä autonomisissa ajoneuvoissa.
Uudet laserit ovat SPL S4L90A_3 A01 ja SPL S1L90A_3 A01, joiden teho on 125 wattia 40 ampeerilla kanavaa kohti. Koska yksikanavaisen version (SPL S1L90A_3 A01) lämpöresistanssi on vain 30 K/W ja nelikanavaisen version (SPL S4L90A_3 A01) 17 K/W, ne ovat helposti jäähdytettävissä jopa suurilla virta-arvoilla. Nelikanavaisessa versiossa (SPL S4L90A_3 A01) piirillä on neljä säteilyetäisyyttä tuottaen 480 watin optisen tehon. Vaikka nelikanavaisen komponentin mitat ovat ainoastaan 3,35 mm x 2,45 mm x 0,65 mm sen ollessa vain hieman suurempi kuin yksikanavainen versio (2,0 mm x 2,3 mm x 0,65 mm), sen kattama ilmaisualue on kuitenkin laaja. Yhteistyössä Efficient Power Conversionin (EPC) ja GaN Systemsin kanssa ASM Osram on kehittämässä arviointityökalupaketteja kummallekin laserversiolle.
ToF-sovelluksia
ASM Osramin infrapuna-VCSEL-teknologiaan ja Chronopticsin patentoituihin syväprosessoinnin algoritmeihin perustuen yhtiöt ovat yhteistyössä kehittäneet 3D-TOF-kamerajärjestelmän, joka päihittää suorituskyvyltään uusimmat iTOF-kamerat. Chronopticsin KEA 3D TOF -kamerajärjestelmä soveltuu erityisen hyvin autonomisen ajamisen, biometrisen tunnistamisen ja mobiililaitteiden lukituksen poiston sovelluksiin.

ASM Osram ja Chronoptics ovat kehittäneet 3D TOF -kamerajärjestelmän, joka päihittää suorituskyvyltään uusimmat iTOF-kamerat.
Mitoiltaan vain 100 x 40 x 35 millimetriä oleva kompakti kamera on suunniteltu toimimaan 0,2 – 15 metrin etäisyyksillä ja sen ulkoinen valovoima on enimmillään 120 000 luxia. Kamerajärjestelmä on varustettu AMS Osramin Bidos P2433Q VCSEL -komponentilla. Se on muodoltaan kompakti, lähtöteholtaan kilpailukykyinen ja moduulin omaavan 38 prosentin hyötysuhteen, jonka odotetaan saavuttavan tulevissa moduuleissa jopa 50 prosentin arvon. Sen kotelointi soveltuu suurten sarjojen tuotantoon.
Vishay toimittaa tehokkailla VCSEL-piireillä varustettuja lähestymisantureita. VCNL36687S:n ilmaisualue on enimmillään 20 senttimetriä ja siihen on integroitu valodiodi, signaaliprosessoripiiri ja 12-bittinen AD-muunnin nastattomaan LLP SMD -koteloon. Koska ilmaisualue on suhteellinen pieni, mekaanisia suojuksia ei tarvita erottamaan optisesti ilmaisinta ja lähetintä toisistaan. Tämä mahdollistaa lähestymisen havaitsemisen helpon toteuttamisen ja käytön.
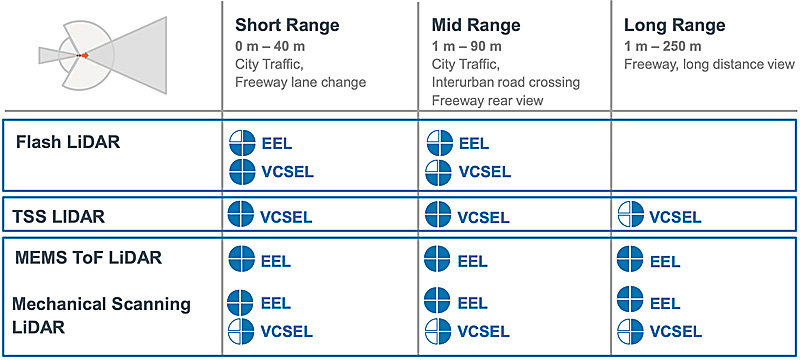
Lidar-arkkitehtuuri vaikuttaa reunasäteilevän EEL-laserin tai pintasäteilevän VCSEL-laserin valintaan (mitä täydempi ympyrä, sitä sopivampi kyseinen laser on kyseessä olevaan sovellukseen). Erityisesti soveltuvuus riippuu kuitenkin suuressa määrin järjestelmän suunnittelusta.
VCSEL:n erittäin kapean (+/- 3 astetta) suunnatun keilan ansiosta anturi soveltuu kapealle ilmaisualueelle eikä se tarvitse minkäänlaisia linssejä. VCNL36687S on tarkoitettu teollisuuden ja kulutuselektroniikan sovelluksiin älypuhelimiin, tabletteihin, virtuaalitodellisuuden (VR) tai lisätyn todellisuuden (AR) kuulokemikrofoneihin ja muihin akkukäyttöisiin laitteisiin esimerkiksi vähentämään tahattomien kosketusten aiheuttamia syötteitä tai ilmaisemaan onko käyttäjällä päällään VR/AR-nappikuulokkeet vai eikö ole.
















 Tekoäly on jo selkeästi ohittanut kokeiluvaiheen. Avnet Insights 2026 -selvityksen mukaan tekoäly on monilla elektroniikan aloilla jo mukana käytössä olevissa tuotteissa, ja sen soveltaminen yleistyy nopeasti kaikkialla EMEA-alueella.
Tekoäly on jo selkeästi ohittanut kokeiluvaiheen. Avnet Insights 2026 -selvityksen mukaan tekoäly on monilla elektroniikan aloilla jo mukana käytössä olevissa tuotteissa, ja sen soveltaminen yleistyy nopeasti kaikkialla EMEA-alueella.