










 Edistyneet kuljettajaa avustavat järjestelmät (ADAS) ja autonominen ajo voivat onnistua, kun ajoneuvoa ympäröivä ympäristö tunnistetaan tehokkaasti autonomisen navigoinnin mahdollistaviin algoritmeihin. Tässä käytetään useita anturimenetelmiä, joiden tiedot yhdistetään yhteen täydentämään toisiaan ja tarjoamaan redundanssia. Näin jokainen tekniikka voi hyödyntää omia vahvuuksiaan ja tarjota paremman yhdistetyn ratkaisun.
Edistyneet kuljettajaa avustavat järjestelmät (ADAS) ja autonominen ajo voivat onnistua, kun ajoneuvoa ympäröivä ympäristö tunnistetaan tehokkaasti autonomisen navigoinnin mahdollistaviin algoritmeihin. Tässä käytetään useita anturimenetelmiä, joiden tiedot yhdistetään yhteen täydentämään toisiaan ja tarjoamaan redundanssia. Näin jokainen tekniikka voi hyödyntää omia vahvuuksiaan ja tarjota paremman yhdistetyn ratkaisun.
|
Artikkelin kirjoittaja Bahman Hadji toimii liiketoiminnan kehittäjänä onsemin autoelektroniikan anturien divisioonassa. |
ADAS- ja robottiajoneuvoissa käytetään kolmea eri anturitekniikkaa: kameroita, tutkia ja lidareita eli valotukia. Jokaisella näistä antureista on omat vahvuutensa, ja yhdessä ne voivat muodostaa täydellisen anturisarjan, joka toimittaa tietoja autonomisten havaintoalgoritmien päätöksentekoon. Ne kertovat värin, intensiteetin, nopeuden ja syvyyden jokaiselle pisteelle näkymässä.
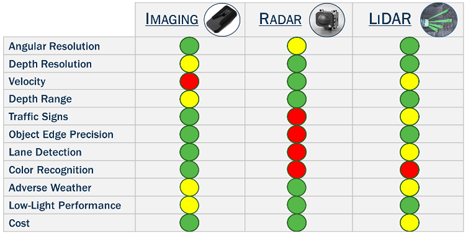
Kuva 1: Anturifuusio hyödyntää kunkin anturitekniikan eli modaliteetin vahvuuksia tarjotakseen täydelliset tiedot ajoneuvon ympäristöstä.
Näistä kolmesta tekniikasta lidar on kaupallistumassa nyt vauhdilla, vaikka ajatus valon käyttämisestä etäisyyden mittaamiseen on jo vuosikymmeniä vanha. Autoteollisuuden lidar-markkinoiden odotetaan kasvavan vuoden 2020 39 miljoonasta dollarista 1,75 miljardiin dollariin vuonna 2025 (Yole Développement, 2020), mikä perustuu pääasiassa kaikki kolme anturitekniikkaa vaativien autonomisten järjestelmien lisääntymisestä.
Markkinapotentiaali on niin suuri, että lidar-teknologian parissa työskentelee reilusti yli 100 yritystä ja kumulatiiviset investoinnit näihin yrityksiin ylittävät 1,5 miljardia dollaria jo vuoteen 2020 mennessä. Kun on näin paljon yhden teknologian parissa työskenteleviä yrityksiä, joiden ratkaisut eroavat esimerkiksi käytettävän valon aallonpituuden suhteen (esimerkiksi 905 ja 1550 nm), on väistämätöntä, että joku nousee voittajakasi ja markkinajohtajaksi. Tulemme näkemään myös keskittymistä, kuten kävi aiemmin esimerkiksi Ethernetin kohdalla.
Kun tarkastellaan lidar-teknologian käyttäjiä – autojen valmistajia sekä yrityksiä, jotka suunnittelevat ja rakentavat autonomisia robottiajoneuvoja ihmisten ja tavaroiden kuljettamiseen – tärkeimmiksi nousevat yritysten omat vaatimukset. Viime kädessä nämä yritykset haluavat toimittajien tarjoavan niille lidar-antureita, jotka ovat edullisia ja erittäin luotettavia ja jotka täyttävät etäisyyden ja havaitsemisen suorituskykyvaatimukset myös heikosti heijastavien kohteiden osalta. Yritykset eivät todennäköisesti välitä niin paljon siitä, millä tekniikalla anturit toteutetaan, jos toimittaja pystyy täyttämään suorituskyky- ja luotettavuusvaatimukset oikeilla kustannuksilla. Ja tämä johtaa tämänkin artikkelin keskiössä olevaan perustavanlaatuiseen kysymykseen: Mikä aallonpituus sopii lopulta parhaiten autoteollisuuden LiDAR-sovelluksiin?
Yleiskatsaus
Ensiksi on välttämätöntä ymmärtää lidar-järjestelmän anatomia, joka voidaan toteuttaa erilaisilla arkkitehtuureilla. Koherentti lidar, jota kutsutaan taajuusmoduloiduksi jatkuvaksi aalloksi (FMCW), sekoittaa lähetetyn lasersignaalin heijastuneen valon kanssa laskeakseen kohteiden etäisyyden ja nopeuden. FMCW tarjoaa joitain etuja, mutta se on edelleen suhteellisen harvinainen verrattuna yleisimpään lidar-toteutukseen eli suoran lentoajan mittaamiseen perustuvaan dToF-lidariin. Siinä mitataan etäisyyttä kohteeseen mittaamalla, kuinka kauan kestää, että valonlähteestä lähetetty hyvin lyhyt valopulssi heijastuu kohteesta ja palautuu tunnistimen havaitsemaksi. Valon nopeuden avulla lasketaan suoraan etäisyys kohteeseen käyttämällä yksinkertaista matemaattista kaavaa, joka ottaa huomioon ajan, nopeuden ja etäisyyden. Tyypillisessä dToF-järjestelmässä on kuusi laitteistotoimintoa, vaikka aallonpituuden valinta vaikuttaa lähinnä lähetys- ja vastaanottotoimintoihin.
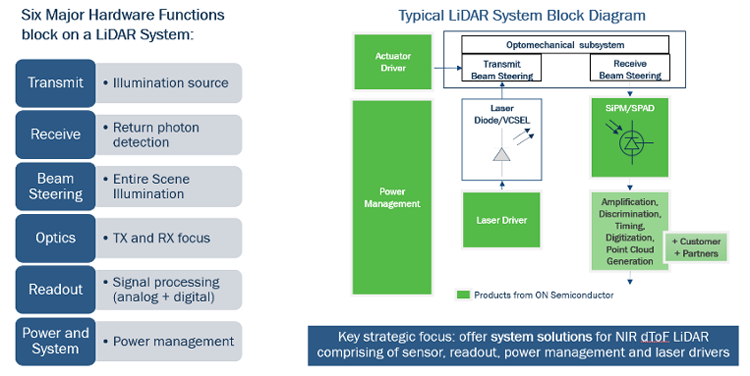
Kuva 2: Lohkokaavio tyypillisestä dToF-järjestelmästä, jossa vihreät osat edustavat joitakin onsemin toimittamien tuotteiden painopistealueita.
Alla olevassa taulukossa on luettelo eri lidar-valmistajista, jotka vaihtelevat tunnetuista autoteollisuuden suurista järjestelmätoimittajista startupeihin eri puolilla maailmaa. Markkinaraporttien ja julkisten tietojen perusteella suurin osa näistä yrityksistä käyttää lidar-laitteitaan ns. NIR-alueella eli lähellä infrapuna-aallonpituuksia (NIR) lyhyen aallon infrapuna-aallonpituuksien (SWIR) sijaan. Vaikka FMCW:n parissa työskentelevät SWIR-alueen lidareita kehittävät toimittajat rajoittuvat näihin aallonpituuksiin, useimmat niistä, joilla on suora lentoaika-toteutus, voivat toteuttaa järjestelmän NIR-aallonpituuksilla. Tähän riittäisi, että ne hyödyntäisivät olemassa olevia IP-lohkoja keilanmuodostuksen ja signaalinkäsittelyn kaltaisiin toimintoihin.
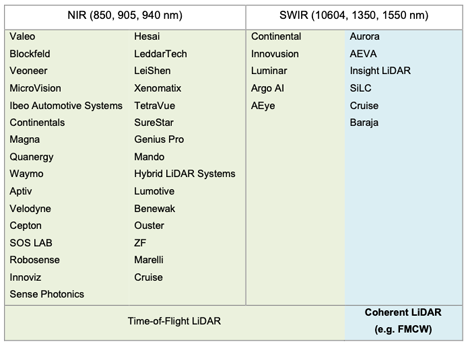
Taulukko 1. Luettelo lidar-valmistajista, joiden tuotteet toimivat NIR- ja SWIR-aallonpituuksilla.
Koska suurin osa näistä valmistajista on valinnut NIR-aallonpituudet, on pohdittava, miksi ne ovat päätyneet tähän valintaan ja mitä seurauksia sillä on. Keskustelun ytimessä on perusfysiikka, joka liittyy lidarissa käytettyjen komponenttien valo- ja puolijohdemateriaalien ominaisuuksiin.
Lidar-järjestelmän laserin laukaisemien fotonien - jotka on tarkoitettu kimpoamaan esineistä ja ilmaisimen vastaanottamiksi - on kilpailtava auringosta tulevien ympäristön fotonien kanssa. Auringon säteilyn spektriä tarkasteltaessa ja ilmakehän absorptio huomioon ottaen säteilyvoimakkuudessa on tietyillä aallonpituuksilla "kuoppia", jotka vähentäisivät järjestelmän kohinana esiintyvien fotonien määrää.
Aallonpituudella 905 nm auringon säteilyn määrä on noin 3 kertaa suurempi kuin 1550 nm:ssä, mikä tarkoittaa, että NIR-järjestelmän on selviydyttävä suuremmasta määrästä anturia mahdollisesti häiritsevää kohinaa. Mutta tämä on vain yksi tekijöistä, jotka on otettava huomioon valittaessa lidar-järjestelmän aallonpituutta.
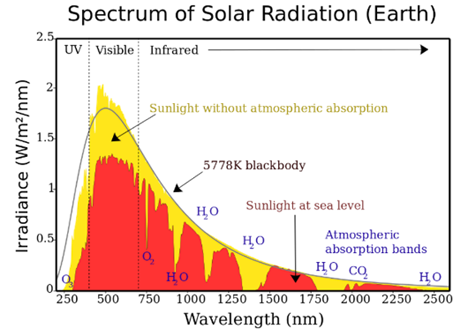
Kuva 3: Ilmakehän valon absorptio johtaa selkeisiin huippuihin säteilyssä.
Anturit
Lidar-järjestelmän fotonien havaitsemisesta vastaavat komponentit ovat erityyppisiä valonilmaisimia, joten on tärkeää selittää, miksi ne voivat koostua erilaisista, havaittavasta aallonpituudesta riippuvista puolijohdemateriaaleista. Puolijohteessa kaistaero (bandgap) erottaa valenssi- ja johtavuuskaistat, ja fotonit tarjoavat energiaa, joka auttaa elektroneja ylittämään tämän kaistaeron ja tekemään puolijohteesta johtavan, mikä luo valovirran. Jokaisen fotonin energia on suhteessa sen aallonpituuteen ja puolijohteen kaistaero sen herkkyyteen. Siksi tarvitaan erilaisia puolijohdemateriaaleja havaittavan valon aallonpituuden mukaan.
Pii, joka on yleisin ja halvin valmistettava puolijohde, reagoi näkyviin ja NIR-aallonpituuksiin noin 1000 nanometriin asti. SWIR-alueen ylittävien aallonpituuksien havaitsemiseksi voidaan tarvita eksoottisempia ryhmän III/V puolijohteita, jotta indium-gallium-arsenidin (InGaAs) kaltaiset materiaalit pystyvät havaitsemaan nämä valon aallonpituudet 1000 nanometristä 2500 nanometriin.
Ensimmäiset lidarit käyttivät PIN-valodiodeja antureina. PIN-valodiodeissa ei ole luontaista vahvistusta ja sen seurauksena ne eivät pysty havaitsemaan heikkoja signaaleja helposti. Avalanche- eli APD-valodiodit ovat tärkein nykylidareissa käytetty anturityyppi, ja ne tarjoavat kohtuullisen vahvistuksen. APD-diodien on kuitenkin toimittava myös lineaarisessa tilassa PIN-valodiodien tapaan, jotta niihin voidaan integroida signaalin fotonien saapumisesta. Yksittäisissä APD-diodeissa on valmistuksesta johtuen paljon epätasaisuuksia ja ne vaativat erittäin korkeita esijännitteitä.
Uusimmat anturityypit, joita käytetään yhä enemmän lidar-laitteissa, on rakennettu yhden fotonin avalanche-diodeihin (SPAD), joilla on erittäin suuri vahvistus. Ne pystyvät tuottamaan mitattavissa olevan virran ulostulon jokaisesta havaitusta fotonista. Pii-valomonistimet (SiPM) ovat piipohjaisten SPAD-laitteiden ryhmiä, joiden lisäetuna on, että ne pystyvät erottamaan yksittäiset fotonit useista fotoneista generoidun signaalin amplitudin perusteella.
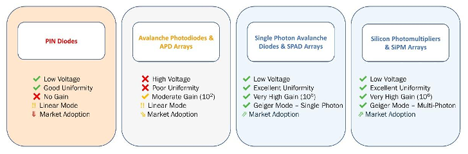
Kuva 4: Erityyppiset valonilmaiset, joita käytetään signaalien havaitsemiseen lidarissa.
Jos palataan takaisin kysymykseen aallonpituuksista, kaikki tämän tyyppiset valoilmaisimet voidaan rakentaa piille (NIR-ilmaisua varten) tai III/V-puolijohteilla (SWIR-ilmaisua varten). Toisaalta valmistettavuus ja kustannukset ovat avainasemassa teknologian kannattavuuden kannalta, ja CMOS-piirien sopimusvalmistajat eli foundryt mahdollistavat tällaisten antureiden edullisen valmistuksen suurissa volyymeissä. Tämä on ensisijainen syy siihen, miksi SiPM-antureiat käytetään lidareissa yhä enemmän, niiden mahdollistaman paremman suorituskyvyn lisäksi.
Vaikka SWIR-alueelle on edeleen tarjolla APD- ja SPAD-ilmaisimia, niitä on vaikea integroida lukulogiikkaan, koska prosessit eivät ole piipohjaisia. Lopuksi SWIR-alueen III/V-pohjaisia SPAD-matriiseja ja valomonistimia (SiPM:n kaltaisia) ei ole vielä kaupallistettu, joten anturien saatavuus suosii NIR-aallonpituuksia.
Tämä on ensimmäinen osa kaksiosaisesta lidarin tekniikkaa käsittelevästä artikkelista. Toinen osa ilmestyy huhtikuussa.
 Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.
Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.


















