











 Mikroaaltoalueen tietoliikennejärjestelmien suorituskykyä voidaan parantaa differentiaalisen kohinaluvun mittausmenetelmillä. Tässä voidaan käyttää Anritsun VectorStar-piirianalysaattoria.
Mikroaaltoalueen tietoliikennejärjestelmien suorituskykyä voidaan parantaa differentiaalisen kohinaluvun mittausmenetelmillä. Tässä voidaan käyttää Anritsun VectorStar-piirianalysaattoria.
| Artikkelin kirjoittaja Christian Sattlerilla on yli 35 vuoden kokemus korkeataajuisesta ja mikroaaltotekniikasta. Hän on työskennellyt kehitysinsinöörinä, palvelupäällikkönä, myynti-insinöörinä ja johtaa tällä hetkellä RF- ja mikroaaltoalueen suunnitteluryhmää. Anritsun palveluksessa Sattler on ollut vuodesta 1995. |
On olemassa useita syitä, miksi differentiaalisten aktiivikomponenttien kuten differentiaalisten LNA-vahvistimien käyttö on yleistymässä. Yhtenä syynä voidaan mainita halun parantaa edullisen hintatason mikroaaltoalueen tietoliikennejärjestelmien, langattomien verkkojen ja optisten lähetinvastaanottimien suorituskykyä. Tämän tyyppisille laitteille on jo olemassa erilaisia mittausproseduureja mukaan lukien todelliseen herätteeseen (true mode) perustuvat kompressiomittaukset ja sekamuotoiset S-parametrit (mixed mode). Sen sijaan kohinaparametreihin perustuvat proseduurit ovat kutakuinkin jääneet jälkeen eikä tarjolla ole näiden laitteiden kohinalukujen analysointiin tarkoitettuja standardoituja ratkaisuja. Anritsun esittelemä VectorStar Differential Noise Figure -optio mahdollistaa sen, että piirianalysaattorilla voidaan mitata 3- ja 4-porttisia laitteita, jotka toimivat ns. ”single-ended” muodossa, differentiaalimuodossa ja yhteismuodossa.
Kaksi yleisintä kohinaluvun mittausmenetelmää
On olemassa kaksi keskeisintä menetelmää kohinaluvun mittaamiseksi: Y-kerroin ”Hot-Cold” ja ”Cold-Source” -menetelmät. Vaikka jälkimmäinen menetelmä on tällä hetkellä muodostunut lähes standardimenetelmäksi piirianalysaattorien yhteydessä, on silti hyödyllistä vertailla näiden menetelmien eroja.
- Y-kerroin ”Hot-Cold” kohinaluvun mittausmenetelmä
Y-kerroin -menetelmä oli suosittu kohinalukumittauksissa, joissa käytetyt kohinalähteet pystyvät tuottamaan pienikohinaisen lähtötehon (Cold = Nc) ja suuremman kohinan omaavan lähtötehon (Hot = Nh). Kohinalähdettä käytetään siten testattavan laitteen tulosignaalina. Näiden kahden tilan mitattujen kohinatehojen suhdetta kutsutaan Y-kertoimeksi (Y = Nh / Nc) ja sen avulla voidaan nopeasti laskea kohinaluku. Eräs Y-kerroin -menetelmän etu on se, ettei siinä tarvitse suorittaa absoluuttisia tehokalibrointeja, koska kaikki laskutoimitukset perustuvat suhdelukuihin. Y-kerroin menetelmän ongelmia ovat kohinalähteen tehdaskalibrointi ja epäsovituksesta aiheutuvat virheet. Näistä saattaa olla seurauksena suuria mittausvirheitä, erityisesti jos testattavien laitteiden tulon sovitus osoittautuu tavallista huonommaksi.
- ”Cold-Source” kohinaluvun mittausmenetelmä
Cold-Source kohinaluvun mittausmenetelmä kehitettiin, jotta kohinalähteen sijaan saatiin käyttöön paljon yksinkertaisempi ja paremmin ohjattavissa oleva kohinalähde – terminointi huonelämpötilassa.
Kohinaluku voidaan laskea helposti yhtälöstä:

missä:
- k on Boltzmannin vakio
- N on lisätty kohinateho
- G on vahvistus
- B on kaistanleveys
- T0 on asetettu tavallisesti arvoksi 290K
Kohinaluvun laskeminen edellyttää useita vaiheita. Ensin tarvitaan absoluuttinen kohinateho (osoitin N). Toiseksi tarvitaan todellinen mittauskaistanleveys (B). Kolmanneksi vastaanottimen kohinavaikutus on otettava huomioon.
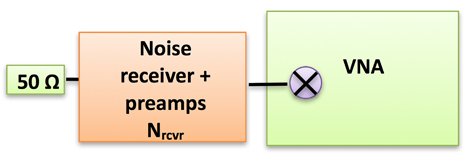
Kuva 1: Vastaanotinkohinan mittaus terminoinnilla (Cold-Source).
Kun vastaanottimen kohina otetaan huomioon, edellä oleva yhtälö voidaan kirjoittaa muotoon:

Testattavan laitteen (DUT) vahvistus (G) voidaan helposti ja tarkasti mitata samalla piirianalysaattorilla. Kun kaikki neljä S-parametria (s2p tiedosto) tiedetään, saadaan Y-kerroin -mittauksessa ilmeneviä epäsovituksesta johtuvia virheitä vähennettyä merkittävästi.
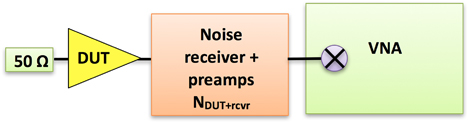
Kuva 2: Testattavan laitteen kohinaluvun mittaaminen Cold-Source -menetelmällä.
Differentiaalisen kohinaluvun mittausproseduuri
Ennen differentiaalisen kohinaluvun mittaamisen aloittamista on tärkeää ensin määrittää tutkittavan differentiaalilaitteen tyyppi. Pääsääntöisesti tarkasteltavana on kaksi erilaista skenaariota.
Jos differentiaalilaitteen lähdössä ilmenee korreloimatonta toimintatapaa, mittaamisessa käytetään korreloimatonta menetelmää. Tämä toteutetaan yksinkertaisesti suorittamalla kaksi ”Single ended” kohinalukumittausta.
Jos on epäselvää, esiintyykö korreloimatonta toimintatapaa, tai jos epäillään, että korrelaatiota on jonkin verran olemassa differentiaaliporttien lähtösignaalien välillä, on laitetta parasta pitää korreloituna.
Anritsun VectorStar piirianalysaattori tarjoaa kolme seuraavaa menetelmää differentiaalisen kohinaluvun mittaamiseksi:
1. Korreloimattoman kohinaluvun mittaaminen
Tämä on sovellettavissa, kun laitteessa on kaksi mittausvirheistä puhdasta itsenäistä signaalipolkua, jotka ovat hyvin eristetty kohinan suhteen toisistaan. Korreloimatonta kohinaa omaavan differentiaalilaitteen yhteydessä voidaan käyttää kahta ”single ended” kohinalukumittausta, mikä olikin aikaisemmin tapa määritellä tunnusluvut monille differentiaalilaitteille. Jos laitteessa on korreloituja signaaleja, niitä ei oteta mukaan analyysiin.
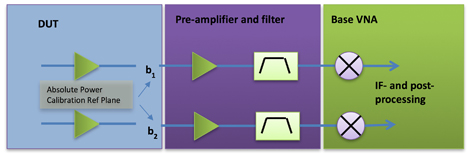
Kuvassa kaksi VNA-vastaanotinta on yhdistetty esivahvistimeen ja suodattimeen. Vastaanottimen kalibrointi muodostaa absoluuttisen tehoreferenssitason Cold-Source-mittauksille. Koska korrelaatio jätetään huomioimatta, differentiaaliseksi (bd) ja yhteismuotoiseksi (bc) kohinatehoksi saadaan:

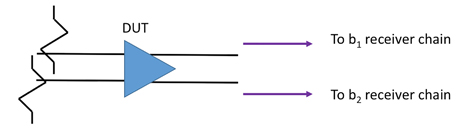
2. Korreloidun kohinaluvun menetelmä koherenteilla vastaanottimilla
Käyttämällä VectorStar VNAn aikakoherentteja IF-kanavia on mahdollista saada suoraan korrelaatio tutkittavan laitteen lähtöporttien välillä. Koska kohinan aaltomuodot näytteistetään suoraan IF-prosessoinnin jälkeen, kahden kohinasignaalin välinen korrelaatio saadaan säilymään tiettyjen korjaustasojen jälkeen.
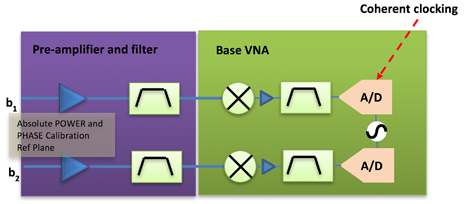
Kuva 3: Korreloidun kohinamittauksen esittämät koherentit digitoijat.
Differentiaaliset ja yhteismuotoiset kohinatehot ovat tässä tapauksessa kompleksilukuja ja ne voidaan esittää seuraavasti:

Kuvassa 4 esitetään käytännöllinen mittausjärjestely differentiaalisen kohinaluvun mittaamiseksi VectorStarin avulla.
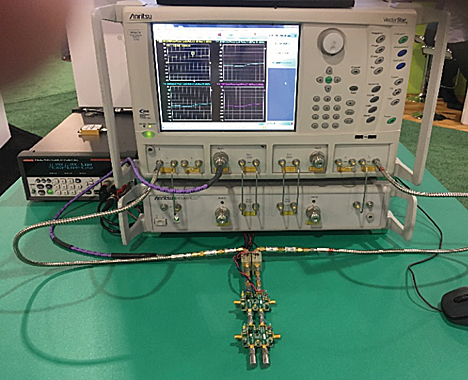
Kuva 4: Differentiaalisen kohinaluvun mittausjärjestelyt VectorStarilla.
Koska b1 ja b2 ovat nyt kompleksilukuja, vaiheen referenssitaso pitää muodostaa. Tämä saadaan helposti tehtyä läpikytkemällä signaali sisäisestä lähteestä kuhunkin vastaanotinlinjaan. Tämä voidaan tehdä yhtä aikaa vastaanottimen kalibroinnin kanssa.
3. Balun-pohjaiset menetelmät
Differentiaalisen kohinalukumittauksen perinteinen lähestymistapa on käyttää balunia tai Combineria ja ”irrottaa” (de-embed) balun lopputuloksesta.
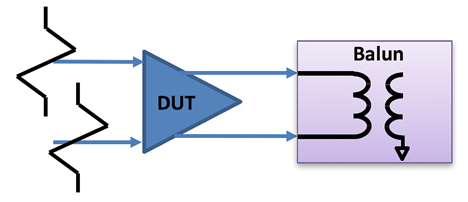
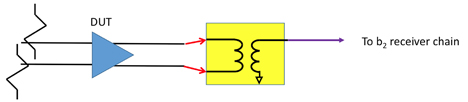
Kuva 5: Differentiaalinen kohinalukumittaus balunin avulla.
Alku on suoraviivainen. Vahvistuksen laskemisessa balunin häviö tulee vain ottaa huomioon ”irrotuksen” (de-embeddingin) kautta:

Tämä oletus pätee vain, jos linjapituudet baluniin ovat yhtä pitkät ja jos balunin balanssi on ideaalinen. Tässä tapauksessa differentiaalisignaali on generoitu perinteistä 2-porttista kohina-analyysiä silmällä pitäen.
Jos balunin balanssi ei ole ideaalinen, seurauksena voi olla merkittäviä virhetilanteita. Ainakin suurtaajuisissa baluneissa ilmenee usein tällainen imbalanssi. Tämän hetken mittausmenetelmät eivät ota huomioon tämäntyylistä imbalanssia, joten balun-pohjaiset menetelmät ovat käytännössä käyttökelvottomia suurilla taajuuksilla. Siinä missä balunin vahvistuksella/häviöllä ei tavallisesti ole suurta merkitystä kohinalukuvirheeseen, sillä on vaikutusta kohinatehoon. Korreloidun ja korreloimattoman kohinatehon välistä eroa voidaan kuvata korrelointiehtona. Simuloimalla nähdään, että suurten amplitudi-imbalanssien (1 dB:iin saakka) vaikutus on vähäinen, mutta vaihe-imbalanssi (esim. 10 astetta) saattaa lisätä kohinaluvun epävarmuutta 0,5 dB:llä.
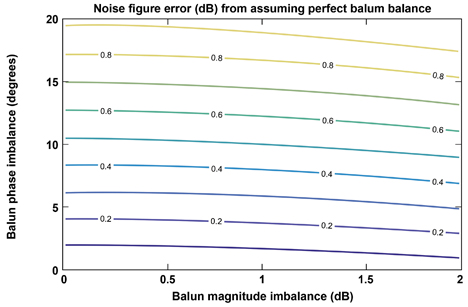
Kuva 6: Balunin imbalanssin aiheuttama kohinalukuvirhe.
Kun balun-imbalanssia pyritään korjaamaan, saadaan mittaustarkkuutta parannettua. Anritsun VectorStarin tarjoama balun-pohjainen kohinalukumenetelmä on varustettu imbalanssin korjausalgoritmilla. Kahdesta mittausjärjestelystä, joista toinen on ”single ended” kytkentä ja toinen balunilla varustettu normaalikytkentä, on balun-pohjaisen menetelmän tarkkuus selvästi parempi. Tarkkuutta voidaan edelleen parantaa käyttämällä ylimääräisenä mittausvaiheena vaihtuvatuloista (swapped input) kytkentää baluniin.
Kuva 7: Vaihe 1 – ”Single ended” kohinadatan keruu.
Kuva 8: Vaihe 2 – Mittaaminen balunilla normaalikytkennässä.
Differentiaalisen kohinaluvun mittausprosessin käytännön toteutus
Toteutuksen proseduuri on hyvin samankaltainen kuin ”Single ended” kohinalukumittauksessa ja se käsittää neljä vaihetta:
- Mittaa testattavan laitteen S-parametrit
- Suorita vastaanottimen kalibrointi
- Suorita kohinakalibrointi
- Mittaa testattava laite
Testattavan laitteen S-parametrimittauksen aikana on tärkeää, että laite ei ole lähelläkään kompressiotilaa. Jotkut transistorit ja LNA-vahvistimet voivat olla voimakkaasti kompressoituneita -35 dBm:n tuloteholla.
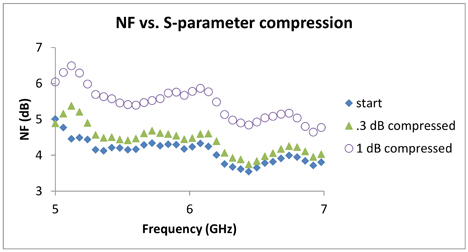
Kuva 9: Kohinaluku suhteessa S-parametrin kompressioon.
Differentiaalisen kohinaluvun mittaamisessa tarvitaan kaksi yhdistelmävastaanotinta. Testattavan laitteen 10 – 25 dB:n vahvistuksille yhdistelmävahvistimen 20 dB:n vahvistus on tavallisesti riittävä.
Yhdistelmävastaanottimen absoluuttitehokalibrointi on tarpeen, vaikkakin yksittäistä VNA-analysaattorin sisäistä lähdettä voidaan käyttää. Testattavan laitteen ja esivahvistimien vahvistuksista riippuen tarvitaan tavallisesti -20 ...-50 dBm:n lähtötehoa piirianalysaattorin lähtöportista.
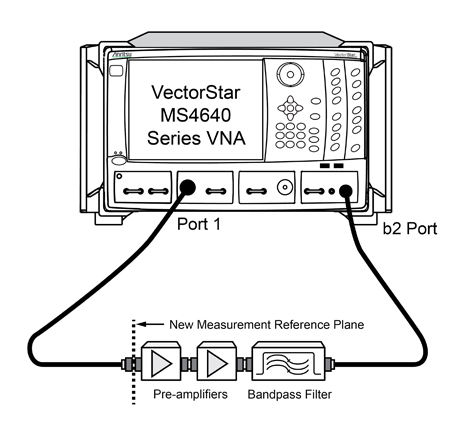
Kuva 10: Vastaanottimen kalibroinnin kokoonpano.
Kuten aiemmin todettiin, kohinatehon kalibrointi suoritetaan päätelaitteena olevan yhdistelmävastaanottimen tulo päätettynä (terminoituna). Koska kohinateho muuttuu tavallisesti hitaasti taajuuden funktiona, kalibrointi-interpolointia voidaan soveltaa mukavuussyistä.
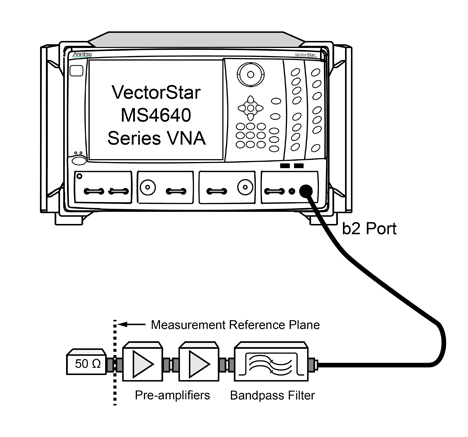
Kuva 11: Kohinatehon kalibrointi.
50 ohmin vastus molemmissa tuloissa on ideaalinen testattavan laitteen kytkennässä 100 ohmin differentiaali-impedanssille. Järkevä yleissääntö on pitää päätevastuksen impedanssi 50 ohmissa.
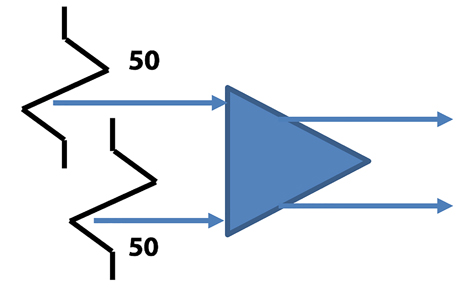
Kuva 12: Tuloportit varustetaan 50 ohmin päätevastuksilla.
Kohinaluvun mittaamisen epätarkkuudet
”Single ended” ja differentiaalisessa kohinalukumittauksissa seuraavat parametrit vaikuttavat mittaamisen epätarkkuuteen:
- Absoluuttinen tehonkalibrointi (mukaan lukien epäsovitusvirheet)
- Vastaanottimen kalibrointi (epäsovitusvirheet)
- Testattavan laitteen vahvistuksen S-parametrin epävakaus
- Datan vaihtelu järjestelmän kohinatasosta ja keruujakson pituudesta johtuen
- Vastaanottimen lineaarisuus
Lisäksi seuraavat asiat tulee huomioida differentiaalisen kohinaluvun yhteydessä:
- Korrelaation pois jättäminen (korreloimaton menetelmä)
- Balunin ominaisuuksien tarkkuus
- Imbalanssin käsittely (balun-mittauksessa)
- Korrelaatiolaskennan epätarkkuudet ja varianssit (suora korrelaatiomenetelmä)
Esimerkkinä mainittakoon, että kun testattavaa laitetta käytetään 20 dB:n vahvistuksella, 20 dB:n paluuhäviöllä (Return loss), 5 dB:n kohinaluvulla ja oletetaan, että testattava laite on korreloimaton, mitään eroa ei ole virhemäärissä havaittavissa käytetään sitten korreloimatonta tai suoraan korreloitua menetelmää. Jos kuitenkin käytetään balunin karakterisoinnista aiheutuu virhettä merkittävissä määrin:
- Korreloimaton menetelmä: 0,4 dB virhe
- Suoraan korreloitu menetelmä: 0,4 dB virhe
- Balun-pohjainen menetelmä: 0,5 dB virhe (oletuksena 15 dB RL ja 0,5 dB liitäntähäviöitä)
(Tässä esimerkissä käytettiin suuren vahvistuksen ja 5 dB:n kohinaluvun omaavaa vastaanotinta 3 kHz:n IF-kaistalla ja 3000 RMS-pisteellä.)
Kun käytetään samoja parametreja suuresti korreloidulla testattavalla laitteella, mittausvirheet ovat paljon merkittävämpiä ja eroavat toisistaan eri menetelmillä:
- Korreloimaton menetelmä: 3,1 dB virhe
- Suoraan korreloitu menetelmä: 0,6 dB virhe
- Yksinkertainen balun-menetelmä: 1,1 dB virhe
- Korreloitu balun-menetelmä: 0,7 dB virhe
Yhteenvetona voidaan todeta, että ainoastaan koherentteja vastaanottimia käyttävällä suoraan korreloidulla menetelmällä esiintyy vähiten mittausvirhettä, joten vain sillä voidaan taata minkä tahansa differentiaalisen testattavan laitteen todellinen kohinaluku.
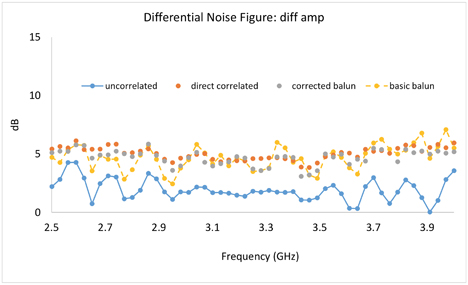
Kuva 13: Kokeiden vertailu.
Cold-Source -menetelmällä voidaan suorittaa kohinaluvun mittaaminen myös suurilla taajuusalueilla. Tämä mahdollistaa monia uudenlaisia mahdolisuuksia laitteiden karakterisoinnille E- ja W-kaistan taajuuksilla.
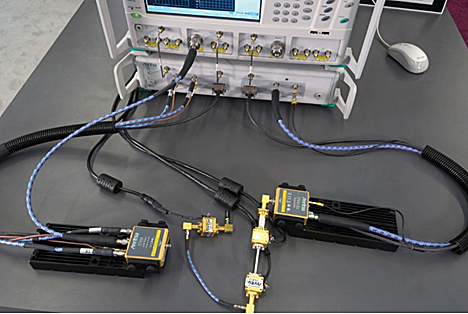
Seuraavassa kuvassa esitetään kohinalukumittauksen kokoonpano 100 GHz:llä Anritsun VectorStar VNA-analysaattoria käyttäen:
Differentiaaliselle W-kaistan vahvistimelle tehtiin mittaukset käyttämällä VectorStarin kolmea erilaista kohinalukumenetelmää ja tulosten vertailu esitetään alla.
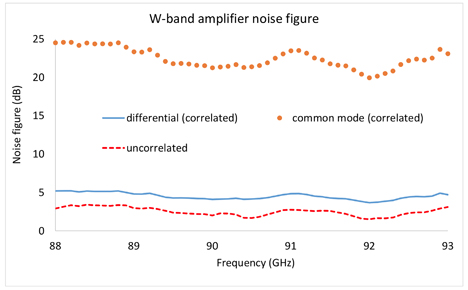
Kuva 14: Esimerkki W-kaistan differentiaalisista kohinaluvuista.
Differentiaalisen korreloidun menetelmän edut ovat selvästi nähtävissä.
Johtopäätös
Differentiaalisesta kohinaluvun mittaamisesta on tulossa yhä tärkeämpää ja virallisten standardien puuttumisesta huolimatta edellä kuvatut menetelmät ovat ristiriidattomia ja suhteellisen käytännöllisiä. VectorStar-analysaattoriin saatavissa olevat uudemmat menetelmät mahdollistavat testattavien laitteiden lähtöjen korrelaation paremman karakterisoinnin ja mittausten parantamisen. Epätarkkuudet ovat suoraviivaisesti seurausta korreloimattomista mittauksista.
Seuraava iso askel tulee olemaan vastausten löytäminen differentiaalisten kohinaparametrien aiheuttamiin haasteisiin. Useat tutkimusryhmät työskentelevät parhaillaan aktiivisesti näiden haasteiden parissa.


















 Tekoäly on jo selkeästi ohittanut kokeiluvaiheen. Avnet Insights 2026 -selvityksen mukaan tekoäly on monilla elektroniikan aloilla jo mukana käytössä olevissa tuotteissa, ja sen soveltaminen yleistyy nopeasti kaikkialla EMEA-alueella.
Tekoäly on jo selkeästi ohittanut kokeiluvaiheen. Avnet Insights 2026 -selvityksen mukaan tekoäly on monilla elektroniikan aloilla jo mukana käytössä olevissa tuotteissa, ja sen soveltaminen yleistyy nopeasti kaikkialla EMEA-alueella.