










 Autojen käyttömukavuutta on jo pitkään haluttu parantaa moottoroiduilla toiminnoilla. Kustannussyistä toteutukset ovat usein perustuneet harjallisiin tasavirtamoottoreihin. Viime aikoina harjattomat BLDC-moottorit ovat alkaneet valloittaa autosovelluksia. Toshiba tarjoaa tähän tarkoitukseen mikro-ohjaimen ja moottorin väliin sijoitettavan energiatehokkaan ohjauspiirin, johon on integroitu tarvittavat esiajurit ja H-siltaohjaimet.
Autojen käyttömukavuutta on jo pitkään haluttu parantaa moottoroiduilla toiminnoilla. Kustannussyistä toteutukset ovat usein perustuneet harjallisiin tasavirtamoottoreihin. Viime aikoina harjattomat BLDC-moottorit ovat alkaneet valloittaa autosovelluksia. Toshiba tarjoaa tähän tarkoitukseen mikro-ohjaimen ja moottorin väliin sijoitettavan energiatehokkaan ohjauspiirin, johon on integroitu tarvittavat esiajurit ja H-siltaohjaimet.
|
Artikkelin kirjoittaja Klaus Neuenhüskes vastaa Toshiba Electronics Europen järjestelmä- ja sekasignaalipiirien markkinoinnista. |
Pieni ylellisyys on aina paikallaan varsinkin silloin, kun kysymys on auton valinnasta. Autoilijat ovat jo pitkään päässeet nauttimaan sähköistämisen tarjoamista mukavuuksista, mikä monien kohdalla on alkanut ikkunalasien sähkötoimisista nostimista. Niiden avulla ikkunan saa auki tai kiinni vain nappia painamalla kammen veivaamisen sijasta.

Useiden kuljettajien jakamissa ajoneuvoissa turhauttavaa on aiemmin ollut tarve muuttaa istuimen lukuisia säätöjä aina kuskin vaihtuessa. Nykyään moottoriohjatuissa istuimissa on usein mukana integroitu muistitoiminto, jonka avulla jokainen kuljettaja voi palauttaa omat säätönsä ja päästä mukavaan ajoasentoon vain yhdellä kosketuksella. Ja tila-autoissa puolestaan perheen pienimmätkin voivat helposti avata ja sulkea raskaita liukuovia moottoriavusteisen toiminnan ansiosta.
Vaikka harjattomien tasavirtamoottorien (BLDC) tarjoamat edut ovat löytäneet tiensä jo lähes kaikkiin mahdollisiin moottoroituihin sovelluksiin, monia tässä käsiteltävistä ajoneuvojen sovelluskohteista toteutetaan edelleen myös harjallisilla DC-moottoreilla. Tämä johtuu siitä, että saavutettu käyttöiän ja energiatehokkuuden parannus ei aina riitä perusteluksi BLDC-moottorin valinnalle, joka vaatii monimutkaisempaa suunnittelua ja korkeampia kustannuksia.
Koko ajomatkan ajan jatkuvasti toimivalle bensapumpulle BLDC-ratkaisun tarjoama pitkä käyttöikä ja energiansäästö ovat ilmeisiä etuja. Mutta sellaiset moottorikäyttöiset sovellukset, joita käytetään koko matkan aikana ehkä kerran tai pari vain muutaman sekunnin ajan, voivat hyötyä harjallisten DC-moottorien yksinkertaisesta rakenteesta ja edullisesta hinnasta.
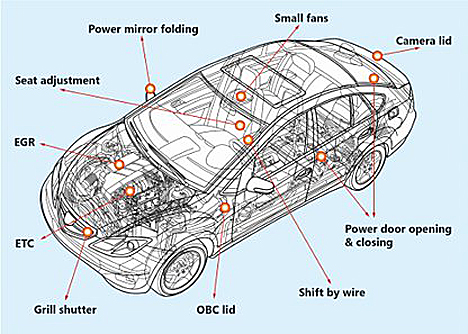
Kuva 1. Ajoneuvon DC-moottorien ohjausjärjestelmä jakautuu lukuisiin eri toimintoihin.
Tasavirtamoottorin ohjauselektroniikan suunnittelussa järjestelmien kehittäjiä hemmotellaan valinnanmahdollisuuksilla. Mikro-ohjain (MCU) sijaitsee ECU-yksikön ytimessä ja vastaanottaa tulosignaaleja CAN- tai LIN-väylän kautta muuntaen ne moottorien ohjaussignaaleiksi. Näiden lähtösignaalien on ohjattava tehokytkimiä (yleensä mosfettejä), jotka on kytketty H-sillan muotoon.
H-silta sallii moottorin pyörivän molempiin suuntiin ja ohjaa pyörimisnopeutta PWM-signaaleja (Pulse Width Modulation) hyödyntäen. Valitettavasti MCU:n logiikkalähdöt eivät suoraan kykene tuottamaan riittävästi tehoa näiden tehokytkimen hilaohjausta varten. Siksi tarvitaan myös hilaohjain, joka nostaa logiikkalähtöjen tehon MOSFET-transistorien ohjauksen vaatimalle tasolle.
Yksinkertaisin tapa luokitella näitä järjestelmiä on jakaa ne toimintojen mukaan: mikro-ohjain, esiajuri, H-silta (kuva 2). Koska suunnittelijoilla on kova paine luoda yhä kompaktimpia ja luotettavampia ratkaisuja, tarvitaan vaihtoehtoisia, pidemmälle integroituja lähestymistapoja.
Mikro-ohjaimen ja esiajurin integroiminen on yksi vaihtoehto. Sen haasteena on, että mikro-ohjaimen käyttämä ohjelmisto on yleensä jo valmiina saatavilla testattuna ja turvalliseksi hyväksyttynä. Näin ollen vaatimus ohjelmiston sovittamisesta ja uudelleensertifioinnista nousee esteeksi sujuvalle suunnittelulle.
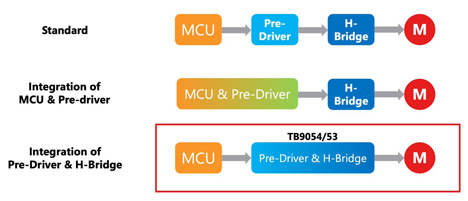
Kuva 2. Tasavirtamoottorien ohjauksessa piiratkaisujen integrointi on järkevintä tehdä esiajurin ja H-sillan kesken, jolloin MCU-piirin valinta jää avoimeksi.
Koska mikro-ohjain on säilytettävä mukana, vaihtoehtona on käyttää moottorin ohjaukseen MCD-ajuria (Motor Control Driver), joka integroi esiajurin ja H-sillan. Kun tämä arkkitehtuuri on käytössä, alustan laajentaminen ei vaadi paljon mielikuvitusta, jotta käytettävissä olevasta kokoonpanosta saadaan tuki myös monimoottoriselle järjestelmälle räätälöityä MCD-ratkaisua hyödyntäen.
Integroitu H-silta esiajurin kera
Toshiban hiljattain esittelemät piirit TB9053FTG ja TB9054FTG perustuvat autoelektroniikan perinteisiin ratkaisuihin, jotka juontuvat 1970-luvulle. Nämä kaksikanavaiset DC-moottorien ohjainpiirit on valmistettu vankalla BiCD-teknologialla, joka yhdistää bipolaaristen, CMOS-pohjaisten ja DMOS-pohjaisten rakenteiden parhaat ominaisuudet.
Kumpikin piiri sisältää kaksi H-siltaa, jotka koostuvat N-kanavaisista DMOS-kytkimistä, niihin liittyvistä esiajureista sekä useista vaihtoehtoisista diagnoosi- ja ohjaustoiminnoista. Rakenne tukee kuluttajien yleistyviä vaatimuksia ymmärtää ajoneuvoon liittyvien ongelmien syyt tarkasti, ja lisäksi autojen OEM-valmistajat voivat nopeasti löytää mahdollisten toimintahäiriöiden lähteet.
Ohjainpiirit voivat toimia joko SMALL-tilassa, joka tukee enintään kahta 5 ampeerin moottoria, tai LARGE-tilassa, jolloin kanavia voidaan käyttää rinnakkain yhden jopa 10 A moottorin ohjaamiseen (kuva 3). BiCD-prosessi varmistaa, että tehokytkin pystyy tarjoamaan riittävän alhaisen resistanssipolun (290 mΩ @ Tj=150°C per lähtökanava) tehohäviön ja lämmöntuoton pitämiseksi minimissä. Tarvittavien ulkoisten komponenttien määrän minimoimiseksi esiajurien varauspumppuja varten tarvittavat kondensaattorit on integroitu piiriin. Rakenteen avulla voidaan saavuttaa jopa 100% pulssisuhde.
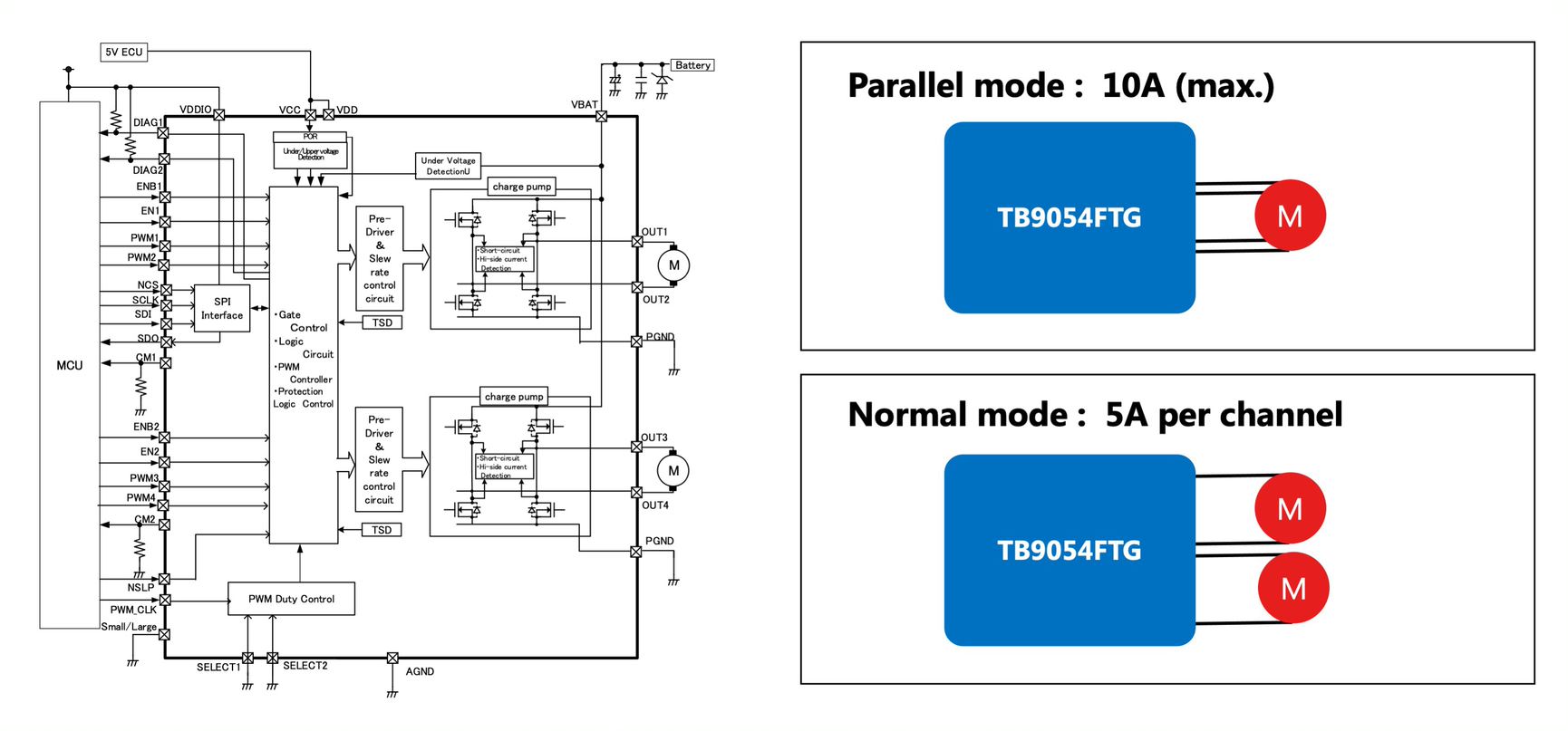
Kuva 3. TB905xFTG-ohjainpiiri pystyy SMALL-tilassa syöttämään enimmillään 5 ampeeria (per kanava) kahdelle moottorille tai LARGE-tilassa 10 A yhdelle moottorille.
Ohjaus voidaan toteuttaa mikro-ohjaimen PWM-lähdöillä. Neljällä integroidulla puolisillalla on erilliset PWM-tulolinjat, joita voidaan käyttää taajuusalueella 1 – 20 kHz. Kuolleen ajan lisäys käsitellään piirissä automaattisesti, ja loput piirinastat on tarkoitettu ohjaimen konfigurointia varten. Niillä voidaan myös sallia tai estää piirin toiminta. Tämä yksinkertainen ohjausliitäntä jättää kuitenkin suuren osan TB905xFTG-piirin ominaisuuksista hyödyntämättä.
Sarjamuotoinen SPI-liitäntä tarjoaa pääsyn monenlaisiin konfiguroinnin vaihtoehtoihin ja diagnostiikkatietoihin. Lisäksi useita piirejä voidaan ketjuttaa ohjaamaan moottoriryhmiä. Hakkurityyppisenä virranrajoituksen ohjauksena toteutettu ylivirtakynnys voidaan SMALL-tilassa asettaa välille 4,6 – 6,5 A ja LARGE-tilassa välille 9,2 – 13,0 A.
Moottorinohjainta voidaan myös käyttää pelkästään SPI-väylän kautta (kuva 4). Integroitu sisäinen 16 MHz oskillaattori ja PWM-ohjain vähentävät mikro-ohjaimen syöttämien signaalien lukumäärää. Vaikka mikro-ohjaimen yhtä kellolähtöä voidaan käyttää aikaperustana, sisäistä oskillaattoria voidaan käyttää varatoimena palautumistoiminnon (’limp home’) muodostamiseksi, jos ulkoisen kellosignaalin käyttö estyy jostain syystä.
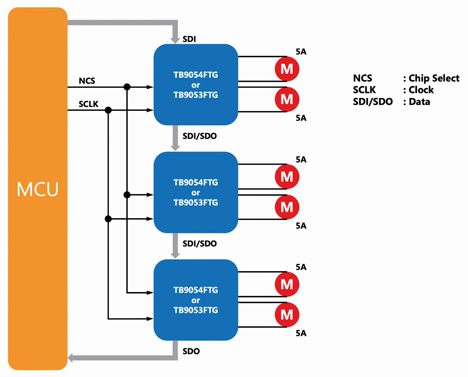
Kuva 4. SPI-liitännän käyttö vähentää tarvittavien MCU-nastojen lukumäärää sisäisen oskillaattorin ja PWM-lohkojen ansiosta.
Koska tällaisissa sovelluksissa kulkee melko suuria virtoja, sähkömagneettisen yhteensopivuuden eli EMC-vaatimusten täyttäminen voi olla merkittävä haaste. Kehitysprosessin helpottamiseksi TB905xFTG-piiri tarjoaa portaittain seitsemän vaihtoehtoa kytkennän nousunopeuden ohjaamiseksi välillä 1,09 – 26,25 V/µs (kuva 5).
Johtavan tilan alhainen resistanssi auttaa pitämään lämmöntuotannon minimissä. Lämpötaloudeltaan parannellun koteloinnin ansiosta kaikki TB905xFTG-piirissä syntyvä lämpö häviää helposti. Ylimääräinen integroitu jäähdytyselementti antaa piirille alhaisen lämpövastusarvon, vain 0,67 °C/W. Tämän ansiosta pelkkä piirilevy riittää jäähdytyselementiksi monissa toteutuksissa.
TB905xFTG-piiri on pakattu jalattomaan 6x6 millin VQFN-koteloon (juotospisteet 0,5 mm välein), jossa hyödynnetään myös reunojen kautta juottuvaa WF-rakennetta (Wettable Flank). Sen ansiosta juotokset voidaan tarkastaa automaattisesti optisilla menetelmillä (AOI, Automated Optical Inspection).
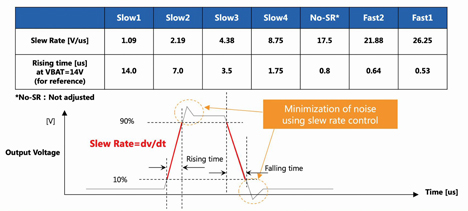
Kuva 5. TB905xFTG-ohjainpiiri tarjoaa seitsemän eri nousunopeuden tasoa, mikä voi helpottaa EMC-vaatimusten täyttämistä.
Perinteisiä ratkaisuja käytetään yhä
Vaikka monet moottoroidut sovellukset ovat siirtymässä BLDC-moottorien hyödyntämiseen, autoteollisuudessa on edelleen paljon järjestelmiä, jotka yhä luottavat perinteisiin 12 voltin harjallisiin DC-moottoreihin suunnittelun yksinkertaisuuden ja alhaisten kustannusten vuoksi.
TB905xFTG:n kaltaisissa piireissä sovelletaan kuitenkin hyvin edistyksellistä prosessitekniikkaa (BiCD) vahvasti konfiguroitavan ja tehokkaan moottorinohjauksen aikaansaamiseksi. Ohjainpiirit täyttävät myös ajoneuvojen valmistuksen tiukat laatuvaatimukset samalla, kun ne antavat mahdollisuuden alustapohjaiseen lähestymistapaan, jonka avulla voidaan säilyttää nykyiset MCU-ratkaisut ja sertifioidut ohjelmistot. Kattavan diagnostiikkakyvyn ansiosta piirit integroituvat mainiosti myös uusimpiin älykkäisiin ajoneuvoalustoihin.
 Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.
Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.


















