Korkea melutaso käynnistysvaiheessa ja alhaisilla kierrosnopeuksilla on ollut ongelmana harjattomien sähkömoottorien ohjauksessa. Optimiratkaisu ongelmaan on Toshiban kehittämä symmetrisen kantoaallon monimuotoinen PWM-menetelmä, jonka ansiosta vältytään ylimääräiseltä vääntömomentin aaltoilulta, EMI-häiriöiltä ja melulta. Saatavissa on jo valikoima menetelmää hyödyntäviä mikro-ohjaimia.
Korkea melutaso käynnistysvaiheessa ja alhaisilla kierrosnopeuksilla on ollut ongelmana harjattomien sähkömoottorien ohjauksessa. Optimiratkaisu ongelmaan on Toshiban kehittämä symmetrisen kantoaallon monimuotoinen PWM-menetelmä, jonka ansiosta vältytään ylimääräiseltä vääntömomentin aaltoilulta, EMI-häiriöiltä ja melulta. Saatavissa on jo valikoima menetelmää hyödyntäviä mikro-ohjaimia.
|
Artikkelin kirjoittaja Patrick Osterloh toimii Toshiba Electronics Europe -yhtiössä teknisenä johtajana. |
Siirtyminen sähköisesti kommutoituihin harjattomiin moottoreihin on tuonut huomattavia energiasäästöjä ja vähentänyt huoltotarvetta verrattuna harjallisiin moottoreihin. Ilman kommutoinnin muodostavaa mekaanista harja-rengas-yhdistelmää moottorikäyttöjen kehittäjien on kuitenkin turvauduttava vaihtoehtoisiin kommutointimenetelmiin.
Ihannetapauksessa Hall-anturit, resolverit tai enkooderit voivat tarjota optimaaliseen kommutointiin tarvittavan kulmainformaation. Mutta monissa sovelluksissa anturien asentaminen ei ole mahdollista kustannusten, luotettavuuden tai tilarajoitusten vuoksi. Vuosien mittaan tähän haasteeseen on kehitetty useita innovatiivisia lähestymistapoja, jotka määrittävät moottorin kulman perustuen ensisijaisesti moottorin käämien tuottamaan vastakkaiseen sähkömotoriseen voimaan (EMF).
Kestomagneetteihin perustuvassa synkronimoottorissa (PMSM) roottorin kestomagneetit synnyttävät vastakkaisen EMF:n staattorin käämeissä aina ohittaessaan staattorin navat. Vastakkaisen EMF-jännitteen amplitudi riippuu pyörimisnopeudesta ja se voidaan mitata hyödyntämällä AD-muunninta mikro-ohjainpiirissä, jota käytetään moottorin sähköiseen kommutointiin. Tämän lähestymistavan ongelmana on, että kun roottori on paikallaan tai liikkuu hitaasti, mittaamiseen ei ole saatavissa EMF-vastajännitettä tai se on hyvin alhainen.
Tämän seurauksena moottorin ollessa pysähtyneenä roottorin (ja sen magneettien) asentoa ei anturittomissa järjestelmissä tiedetä, mikä vaikeuttaa moottorin optimaalista ohjausta. Pakotettua (esim. kuusivaiheista) kommutointia voidaan kuitenkin käyttää moottorin käynnistämiseen. Se synnyttää pyörivän magneettisen staattorikentän siinä toivossa, että roottori lopulta alkaa seurata kenttää, kunnes nopeus on sellainen, että käytettävissä on käyttökelpoinen EMF-vastasignaali.
Vaikka tämä lähestymistapa on toimiva, roottorin ja pyörivän magneettikentän yhteensopimattomuuden vuoksi seurauksena syntyvä vääntömomentin aaltoilu voi olla melko voimakasta, mikä johtaa moottorin tärinään ja ärsyttävään meluun. Niiden sekä syntyvien mekaanisten rasitusten vuoksi monet sovellukset (esim. kompressorit, pumput ja taajuusmuuttajat) kaipaisivat parempia menetelmiä, jotka parantavat moottorisovelluksen käyttökokemusta ja luotettavuutta.
Kenttäorientoitu ohjaus lyhyesti
Kenttäorientoidun FOC-ohjauksen (Field Oriented Control) algoritmien tärkeimpänä tavoitteena on saavuttaa ja sen jälkeen ylläpitää 90 asteen vaihekulma staattorin ja roottorin magneettikenttien välillä, jolloin saadaan aikaan optimaalinen vakiovääntömomentti. FOC-ohjauksessa moottorin ohjauspiiri tuottaa kolmivaiheisen sinimuotoisen lähdön staattorin käämien virittämiseksi ja sopivan johtokulman ylläpitämiseksi.
Vaiheiden sinimuotoiset lähdöt ovat 120° kulmassa toisiinsa nähden, jolloin saadaan tasaisesti pyörivä staattorikenttä. Sinimuotoisten herätteiden generointia ohjataan tyypillisesti mikro-ohjainpiirin pulssinleveysmoduloiduilla (PWM) lähdöillä, ja nykyiset MCU-piirit tarjoavatkin valikoiman erityisesti moottorien ohjaukseen optimoituja oheislohkoja tämän tavoitteen saavuttamiseksi mahdollisimman vähäisellä ohjelmiston kehitystyöllä.
Aikavarianttien sinimuotoisten signaalien käsittely on matemaattisesti haastavaa. Staattorin käämien virranohjaukseen käytetyt kolmivaihevirrat muunnetaan siksi aika-invarianttiin muotoon tasavirroiksi (flux) ja kvadratuurivirroiksi (torque) soveltamalla Clarke/Park-muunnoksia.
PI-säätimiä käytetään liittämään tämä informaatio haluttuun moottorin nopeuden asetusarvoon ennen käänteisten Park/Clarke-muunnosten soveltamista. Niiden avulla tulokset muunnetaan takaisin aikavarianttiin muotoon kolmivaiheiseksi signaaliksi, jota käytetään mikro-ohjaimen PWM-oheislohkon tulosignaalina.
Anturiton ohjaus alhaisilla nopeuksilla
Perinteiset anturittomat FOC-algoritmit toimivat optimaalisesti silloin, kun moottorin pyörimisnopeus on riittävän korkea tuottamaan käyttökelpoisen EMF-vastasignaalin. Pienemmillä pyörimisnopeuksilla mukaan kytketään muita algoritmeja ohjaamaan moottoria optimaalisesti muiden tunnistusmenetelmien avulla.
Yksi kehittyneimmistä nykyään käytössä olevista lähestymistavoista on tarkkailla staattorin käämien induktanssin muutoksia, jotka johtuvat roottorin ohittavasta magneettikentästä. Tämä induktanssi on maksimissaan, kun staattorikäämin ja roottorin vuoakselit (d-akselit) ovat kohtisuorassa toisiinsa (90° ja 270°). Minimit puolestaan ilmenevät, kun ne ovat yhdensuuntaisia (0° ja 180°). Tuloksena syntyvä kulman mukaan vaihteleva induktanssi tuottaa sinimuotoisen signaalin kaksinkertaista roottorinopeutta vastaavalla taajuudella (kuva 1).
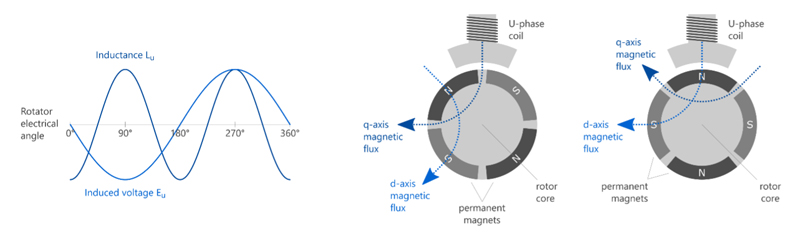
Kuva 1. Staattorikäämien induktanssi vaihtelee kaksinkertaisella roottorinopeudella d- ja q-akselien suuntaisten induktanssien keskinäisen riippuvuuden vuoksi, joten sitä voidaan käyttää roottorin asentokulman määrittämiseen.
Tämä ilmiö on seurausta d- ja q-akselien suuntaisten induktanssien keskinäisestä riippuvuussuhteesta (magnetic saliency) ja se määritetään käyttämällä suuritaajuista jännitettä, jota syötetään moottorin vaiheisiin. Tämän aiheuttamia moottorivirran muutoksia seurataan, jolloin roottorin kulma voidaan määrittää kohtalaisella tarkkuudella.
Eduistaan huolimatta tämä menetelmä ei kuitenkaan ole haasteeton. Päällekkäinen korkeataajuinen signaali lisää sähkömagneettisia häiriöitä (EMI) ja aiheuttaa vääntömomenttiin aaltoilua. Tämä puolestaan tuottaa tärinää ja melua – eli kyseessä on juuri sellainen haaste, jota monet sovelluskehittäjät yrittävät ratkaista.
Tähän lähestymistapaan perustuvan muunnelman tarjoaa INFORM-menetelmä (Indirect Flux detection by Online Reactance Measurements). Siinä suuritaajuista jännitettä syötetään vain satunnaisesti PWM-ohjaussignaalin mukana. Tämäkin lähestymistapa johtaa silti liian usein melutasoon, jota ei voida hyväksyä (kuva 2).

Kuva 2. INFORM-menetelmässä vaiheohjaussignaaliin syötetään ajoittain suuritaajuisia pulsseja. Tämä voi kuitenkin synnyttää haluttua voimakkaampaa akustista melua.
Symmetrinen PWM-menetelmä
Ratkaistakseen näiden lähestymistapojen aiheuttamat meluongelmat Toshiba on tutkinut vaihtoehtoista menettelyä. Siinä hyödynnetään uuden TXZ+ -mikro-ohjainperheen PWM-oheislohkon ainutlaatuista ominaisuutta.
Useimpien MCU-piirien PWM-oheislohkot käyttävät samaa modulaatiokantoaaltoa kaikissa lähdöissä, mutta TXZ+-perheen piirit voivat määrittää erityyppisiä kantoaallon muotoja kullekin PWM-vaiheelle. Siten yksittäisiä vaihelähtöjä voidaan moduloida käyttäen kantoaaltona samanaikaisesti saha-aaltoa, käänteistä saha-aaltoa ja kolmioaaltoa niin, että niillä on edelleen yhteinen tahdistuspiste. Kulkeva virta voidaan määrittää kahdesta vaiheesta (esim. U ja V) differentiaalimittauksilla, jotka on tehty ennen ja jälkeen synkronointipisteen, kun yksi kolmesta PWM-lähdöstä on passiivinen (kuva 3).

Kuva 3. Käyttämällä kolmea symmetristä PWM-kantoaaltoa voidaan vaihevirrat muodostaa differentiaalisesti, kun yksi kolmesta PWM-lähdöstä on passiivinen.
Tämä menettely on osoittautunut erittäin tarkaksi ja se myös tuottaa huomattavasti matalampia melutasoja alhaisilla pyörimisnopeuksilla MS-tekniikoihin (Magnetic Saliency) verrattuna (kuva 4).
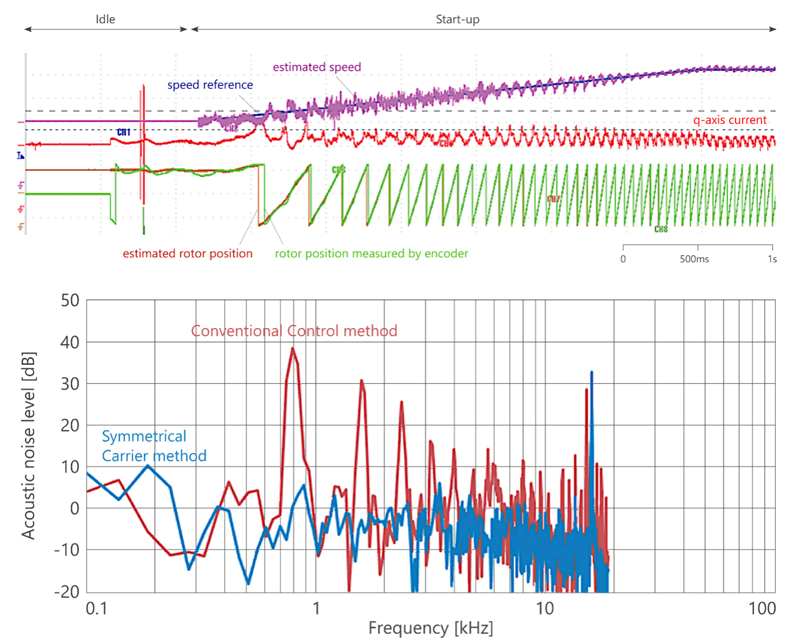
Kuva 4. Ylemmässä kuvassa arvioidun ja (enkooderilla) mitatun roottoriasennon vertailu. Alempana symmetrisen ja tavanomaisen ohjausmenetelmän tuottaman akustisen melun vertailu.
Pitkälle integroidut MCU-ohjaimet
Tämä menettelytapa moottorin hiljaiseen anturittomaan FOC-ohjaukseen voidaan toteuttaa käyttämällä M3H- tai M4K-sarjan mikro-ohjaimia, jotka kuuluvat Toshiban TXZ+-perheeseen. Piireissä hyödynnetään 32-bittisiä Arm Cortex M -suoritinytimiä, ja ne on erityisesti suunnattu FOC- tai vektoriohjauksiin PMSM-tyyppisille moottoreille kuten harjattomille tasavirtamoottoreille.
Symmetristä kantoaaltoa hyödyntävän PWM-menetelmän avain on A-PMD-oheislohko (Advanced Programmable Motor Driver), joka sisältyy M3H- ja M4K-sarjojen mikro-ohjaimiin. Yksilöllisesti konfiguroitavan PWM-kantoaaltomuodon ansiosta piirit tarjoavat synkronoinnin useille moottorikanaville ja niihin liittyville AD-muuntimille. Näin voidaan varmistaa, että virtamittaukset tapahtuvat täsmälleen oikealla hetkellä. Lisäksi tarjolla on mahdollisuus johtavuuden, suojauksen ja kuolleen ajan ohjaukseen.
Integroitu A-VE+-oheislohko (Advanced Vector Engine Plus) yksinkertaistaa entisestään moottorin anturitonta FOC-ohjausta. Se eliminoi suuren osan FOC-algoritmien piiritason monimutkaisuudesta ja toteuttaa (käänteiset) Clarke/Park-muunnokset, PI-säädön, SVM-moduloinnin (Space Vector Modulation) sekä nopeat trigonometriset hyötyfunktiot. Tässä oheislohkossa on myös oma tehtäväajastin, joka yhdessä A-PMD-lohkon ja AD-muuntimen kanssa antaa mahdollisuuden suorittaa suurimman osan FOC-algoritmista itsenäisesti. Tämä vapauttaa laskentaresursseja järjestelmän muihin tehtäviin.
Hiljainen anturiton FOC-ohjaus
Vaikka siirtyminen harjattomiin moottoreihin on tervetullut kehitysvaihe sen tuomien lukuisten parannusten vuoksi - aina energian ja tilan säästöstä suorituskyvyn kohentamiseen asti - optimaalinen anturiton ohjaus tuottaa edelleen haasteita moottorin alhaisilla pyörimisnopeuksilla. MS-tekniikoita hyödyntävät lähestymistavat ovat osoittautuneet lupaaviksi, mutta ne kärsivät silti liian korkeasta melutasosta ja voivat myös tuottaa ylimääräisiä EMC-ongelmia.
Toshiban kehittämä symmetrisen kantoaallon PWM-menetelmä poistaa tarpeen syöttää korkeataajuisia signaaleja staattorivirtaan, jolloin vältytään ylimääräiseltä vääntömomentin aaltoilulta, EMI-häiriöiltä ja melulta. Tämä on mahdollista A-PMD-oheislohkon tarjoaman yksilöllisesti konfiguroitavan PWM-kantoaaltomuodon ansiosta. Yhdessä A-VE+-oheissuorittimen ja tiiviisti kytkettyjen AD-muuntimien kanssa menettely tarjoaa tehokkaan anturittoman FOC-toteutuksen, jonka avulla moottorin melutaso voidaan pitää hallinnassa erityisesti käynnistyksen aikana ja alhaisilla nopeuksilla.











 IGBT on pitkään ollut teollisuuden tukipilari, joka yhdistää suuren tehon yksinkertaisiin ohjaustapoihin. Uuden polven IGBT7-teknologia on saanut merkittäviä parannuksia verrattuna aiempiin sukupolviin: alhaisempi myötäjännite, suuremmat nimellisvirrat, ylikuormituskapasiteetti 175°C asti, tarkempi dv/dt-säätö ja laadukkaampi suojadiodi.
IGBT on pitkään ollut teollisuuden tukipilari, joka yhdistää suuren tehon yksinkertaisiin ohjaustapoihin. Uuden polven IGBT7-teknologia on saanut merkittäviä parannuksia verrattuna aiempiin sukupolviin: alhaisempi myötäjännite, suuremmat nimellisvirrat, ylikuormituskapasiteetti 175°C asti, tarkempi dv/dt-säätö ja laadukkaampi suojadiodi.