










 Autonomiset mobiilirobotit (AMR) ovat yleistymässä monilla teollisuudenaloilla. Ne tarjoavat useita etuja, kuten paremman tehokkuuden, paremman tuottavuuden ja turvallisemman työympäristön. Tässä artikkelissa käsitellään AMR-sovelluksia ja vaatimuksia eri komponenteille, joita käytetään niiden rakentamisessa.
Autonomiset mobiilirobotit (AMR) ovat yleistymässä monilla teollisuudenaloilla. Ne tarjoavat useita etuja, kuten paremman tehokkuuden, paremman tuottavuuden ja turvallisemman työympäristön. Tässä artikkelissa käsitellään AMR-sovelluksia ja vaatimuksia eri komponenteille, joita käytetään niiden rakentamisessa.
| Artikkelin ovat kirjoittaneet onsemin teknisen markkinoinnin asiantuntijat Hunter Freberg ja Bob Card. |
Mobiiliroboteissa tarvitaan moottoreita ja säätimiä, antureita, valaistusta ja tietoliikenneliitäntöjä. Näihin eri vaatimuksiin vastaaminen edellyttää kattavia ratkaisuja, jollaisia onsemi tarjoaa.
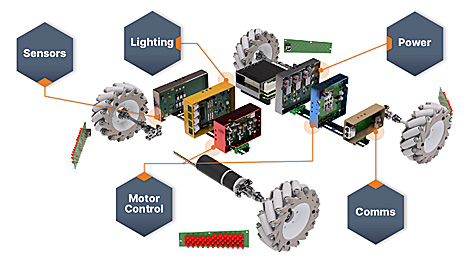
Kuva 1. Onsemin tuotteisiin perustuvia autonomisten mobiilirobottien ratkaisuja.
Sovellukset ja hyödyt
Tehtaissa mobiilirobotteja voidaan käyttää tavaroiden kuljettamiseen ja apuna laadunvalvonnassa. Ne voivat auttaa tavaroiden lastauksessa ja purkamisessa logistiikassa ja varastoinnissa. Eräitä etuja, joita autonomiset mobiilirobotit tuovat viljelijöille, ovat tarkempi sadon seuranta ja maaperän analysointi, mikä lisää tuottavuutta.
Vähittäiskaupassa ja ravintola-alalla voidaan etuja tarjota parempaa asiakaspalvelua käyttämällä AMR-laitteita tilausten toimittamiseen ja vieraiden ohjaamiseen paikan päällä, mikä vapauttaa henkilökuntaa olemaan vuorovaikutuksessa asiakkaiden kanssa. Sovellukset ja alat, joilla itsenäisiä mobiilirobotteja käytetään, kasvavat edelleen niiden taustalla olevan teknologian kehittyessä.
Moottorit ja moottorinohjaus
Moottorikäyttöiset toimilaitteet ovat kriittisiä AMR-roboteissa, koska ne mahdollistavat käsivarsien, nostoalustojen ja pyörien liikkumisen. Toimilaitteen valintaan kuuluu komponenttien, kuten harjattomien tasavirtamoottorien arviointi, moottoriohjaimet, MOSFETit, UCB-ohjauskortit (Universal Controller Boards) ja porttiohjaimet. BLDC-moottorit ovat erittäin tehokkaita, tuottavat vain vähän melua ja vaativat vähemmän huoltoa (täten niistä tulee luotettavampia). Näistä syistä ne ovat suosittuja. Korkean vääntömomentti-painosuhteensa ansiosta moottoriohjaimet voivat hallita moottorin nopeutta ja suuntaa tarkalla liikeprofiililla. Ne voidaan integroida täysin (sulautetulla ohjausalgoritmilla) tai käyttää erillistä mikro-ohjainyksikköä (MCU) ohjausalgoritmin toteuttamiseen.
Kolmivaiheisia BLDC-moottoreita, jotka ovat yleisiä AMR-moottoreissa, ohjaavat kolme korkean puolen ja kolme matalan puolen tehotransistoria, jotka on kytketty moottorin käämiin siten, että ne voivat aktivoida nämä kelat ja luoda magneettikenttiä, jotka pyörittävät roottoria. Kommutointialgoritmeja käytetään tuottamaan PWM-signaaleja (pulssinleveysmodulaatio), joita käytetään näihin kytkimiin niiden kytkemiseksi päälle ja pois. Joitakin esimerkkejä kommutointimenetelmistä ovat sinimuotoinen, puolisuunnikkaan muotoinen ja kenttäsuuntautunut ohjaus. AMR-moottorin ohjauskytkimet ovat tyypillisesti piipohjaisia, koska niissä käytetyt harjattomat moottorit toimivat yleensä 48 V tai sitä alhaisemmilla jännitteillä.
Nopeaa AMR-kehitystä varten onsemi tarjoaa useita BLDC-moottorin ohjausratkaisuja, mukaan lukien 24 V - 600 V, ECS640A ecoSpin ARM Cortex BLDC -moottoriohjaimen integroidulla 3-vaiheisella gate-käytöllä, integroidulla tarkkuustunnistevahvistimella (4x) ja integroiduilla bootstrap-diodilla. Onsemi tarjoaa myös NCD83591 5 V - 60 V 3-vaiheisen BLDC-porttiohjaimen edullisena ratkaisuna.
Onsemi tarjoaa myös SoM-järjestelmämoduulin, joka perustuu Xilinxin Zynq-7000 -järjestelmäpiiriin. Tämä ratkaisu on ihanteellinen sovelluksiin, jotka vaativat tarkkaa ohjausta, ja sitä voidaan käyttää myös tekoälytoimintojen toteuttamiseen. Onsemi tarjoaa valikoiman keskijännitteisiä MOSFETtejä korkean suorituskyvyn moottorisovelluksiin AMR-roboteissa. Yhtiön uusimmat piipohjaiset T10-MOSFETit perustuvat suojattuihin portteihin, joissa on pienempi kytkentäresistanssi (RDSon), pienempi porttivaraus ja luontainen snubber-tyyppinen hallintatoiminto, joka vähentää ylityksiä ja minimoi ylikuulumista. Onsemin 40 V ja 80 V T10 MOSFETeissä on markkinoiden johtava RDSon 0,42 mΩ ja 1,5 mΩ. Ne tarjoavat myös alhaisemman porttilatauksen ja luokkansa parhaan pehmeän palautuksen jännitepiikkien pienentämiseksi.
Mobiilirobotin anturit
AMR-robottien on seurattava ympäristöään ja oltava vuorovaikutuksessa sen kanssa, mikä edellyttää erityyppisiä antureita, joilla kerätä tarvittava data. Yleisesti käytettyjä antureita ovat lämpötila-, kuva-anturit, lidarit eli valotutkat (3D-kartoitukseen), pyörimisliike- ja näkyvän valon VLC-datayhteyksiin käytetyt anturit. Kuva-anturit ja kuvasignaaliprosessorit mahdollistavat visuaalisen havaitsemisen, jolloin AMR voi navigoida ympäristössään havaitsemalla ja tunnistamalla esineitä ja ryhtymällä sitten asianmukaiseen toimintaan.
Onsemi tarjoaa globaalin sulkimen ja rullasulkimen (rolling shutter) kuva-antureita, jotka ovat ihanteellisia AMR-sovelluksiin. Esimerkiksi AR0234CS-kuvakenno perustuu innovatiiviseen globaalin sulkimen pikselisuunnitteluun, joka on optimoitu kaappaamaan tarkasti nopeasti liikkuvia kohtauksia (120 kuvaa sekunnissa) täydellä resoluutiolla, tuottaen teräviä kuvia konenäköä tai viivakoodien skannausta varten. Asentoanturit mittaavat robotin pyörien tai muiden liikkuvien osien pyörimistä, jolloin robotti voi seurata sen sijaintia ja suuntaa tarkasti.
Ultraääni- ja infrapuna-anturit mittaavat etäisyyden etäällä oleviin kohteisiin, jolloin AMR havaitsee esteet ja välttää törmäykset. Onsemin NCS32100 on teollinen pyörivä asentoanturi, jossa yhdistyvät tarkkuus ja nopeus. Siinä on 38 mm:n anturi ja se tarjoaa +/-50 kaarisekunnin tarkkuuden 6000 rpm pyörimisnopeudella. Alhaisemman tarkkuuden sovelluksissa se voi tukea jopa 100 000 rpm nopeuksia. Tämä uusi piiri käyttää patentoitua lähestymistapaa induktiiviseen asennontunnistukseen, joka on ihanteellinen teollisuus- ja robottikäyttöön.
Mistä virtaa?
Virtalähde ja virtapuun toteutus ovat kriittisiä komponentteja, jotka vaikuttavat AMR:n akun kestoon ja toimintakykyyn. AMR:n sähköjärjestelmää valittaessa tärkeitä suorituskykyominaisuuksia ja parametreja ovat muun muassa energiatiheys, jännite- ja virtavaatimukset, hyötysuhde ja ratkaisun koko. Litiumioniakkujen korkea energiatiheys ja pitkä käyttöikä tekevät niistä yleisen valinnan AMR-robotteihin. Tehonhallintayksiköt säätelevät tehonkulkua akusta muihin komponentteihin, kun taas kytkentämuuntimista ja jännitteensäätimistä koostuvat yksiköt varmistavat, että ne saavat asianmukaiset jännite- ja virtatasot. Esimerkkinä FAN65008B on synkroninen PWM Buck -tyyppinen säädin, joka saavuttaa 98 prosentin huippuhyötysuhteen alentamalla 48 V:n tulon 28 V:n ulostuloon ja syöttämällä samalla tasaisen 10 ampeerin DC-kuorman.
Tehokertoimen korjainpiiri NCP1632, LLC-ohjain NCP1399 ja synkroninen SRC-korjausohjain NCP4307 (Synchronous Rectifier Controller) toimivat yhdessä optimoidakseen tehokkuuden muunneltaessa AC:sta tasavirtaan jopa 1 kilowatin teholähteissä.
Onsemin EliteSiC-sarjan piikarbidi-MOSFETit ovat ihanteellisia AC-DC- ja DC-DC-tehon muuntamiseen suuritehoisissa sovelluksissa, joiden teho on tyypillisesti yli 3 kilowattia. AMR-robotin akun lataamiseksi asuin- tai teollisuuskäyttöön tarkoitettu vaihtovirtalähde on muutettava käyttökelpoiseksi keskijännitteisen tasavirtalähdön käyttöön. Sekä AC-DC-etuaste että DC-DC-muuntimen ensisijainen puoli voivat hyötyä EliteSiC-perfeen FETeistä. DC-DC-muuntimen toisiopuoli voi käyttää kytkennöille optimoituja trench-tyyppisiä MOSFETteja.
Valaistus
Valaistusteknologioiden, kuten valodiodien eli ledien avulla AMR-robotit voivat navigoida, kommunikoida ja toimia erilaisissa ympäristöissä. Valaistusta käytetään myös signalointiin ja mobiilirobotin tilan tai suunnan ilmaisemiseen. Kun valaistustekniikkaa valitaan, huomioivia suorituskykyominaisuuksia ja parametreja ovat kirkkaus, värilämpötila ja virrankulutus. Lediohjaimet ja -ajurit ovat kriittisiä komponentteja, jotka valvovat diodissa kulkevan virran määrää, jolloin ne voivat säteillä tietyn intensiteetin ja aallonpituuden omaavaa valoa. Lediohjainpiirit käyttävät korkean ja matalan puolen teho-MOSFETteja kytkemään virran päälle ja pois, ja suojaamaan komponenttia ylijännitteeltä ja ylivirtatilanteilta. Ne varmistavat myös lediohjaimen vakauden.
Onsemin NCV7685-piiri on ledin lineaarivirtaohjain ja NCL31000 älykäs ajuri, jotka sopivat ihanteellisesti AMR-robotin valaistuksen toteutukseen. NCV7685:ssä on kaksitoista lineaarista ohjelmoitavaa vakiovirtalähdettä, joilla on yhteinen referenssi. Tämä mahdollistaa 128 erilaista PWM-säädettävää työsyklitasoa. NCL31000-piirillä on tehokas buck-tyyppinen lediohjain, joka tukee laajakaistaista analogista ja PWM-himmennystä (nollavirtaan asti), kaksi DC-DC-lisämuunninta ja diagnostiikka tulo- ja lähtövirran ja jännitteen, ledilämpötilan ja DC- DC -jännitteiden monitorointiin.
NCL31000 tukee VLC-tekniikkaa (Visible Light Communication), joka käyttää näkyvää valoa yksisuuntaisen datan siirtoon 10 kilobittiin asti sekunnissa. VLC:n avulla autonominen mobiilirobotti voi kommunikoida turvallisesti muiden laitteiden ja ihmisten kanssa. Koska näkyvän valon spektri on 430 - 790 THz, VLC ei vaikuta lähellä oleviin langattomiin teknologioihin, kuten Bluetooth Low Energy, Zigbee, UWB ja Wi-Fi.
VLC on turvallinen, koska se on luonnostaan rajoitettu näköyhteyteen. Mobiilirobotin navigointi varastoissa hyötyy UWB:stä, Bluetooth LE:stä (AoA- ja AoD-signaalikulmat) ja Wi-Fin sisätilapaikannuksesta (IPS, Indoor Positioning Systems). Joskus RF-ruuhkat tai häiriöt voivat vaarantaa IPS-paikannuksen. Tämän ongelman ratkaisemiseksi VLC:tä voidaan käyttää täydentämään olemassa olevaa RF-pohjaista Wi-Fi-paikannusta asentamalla VLC kattovalaisinverkkoon, jossa jokainen kattovalaisin lähettää yksilöllisen ID#:n. Jos AMR-robotissa on pohjapiirrostietokannan, joka sisältää jokaisen valaisimen sijainnin ja yksilöllisen tunnuksen, voi robotti navigoida itsestään yksinkertaisella valodiodilla, joka on suunnattu kattoa päin. Tämä on esitetty kuvassa 2.
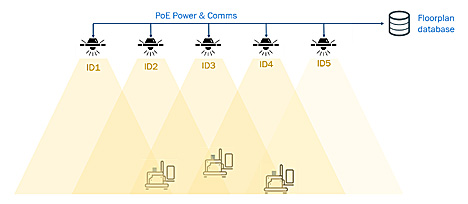
Kuva 2: Autonominen mobiilirobotti käyttää VLC-tekniikkaa sisätilapaikannukseen.
Tietoliikenne
Langattomat viestintätekniikat ovat elintärkeitä mobiiliroboteille, koska niiden avulla ne voivat kommunikoida ja olla vuorovaikutuksessa muiden laitteiden ja järjestelmien kanssa lähettämällä tietoja ja vastaanottamalla komentoja. Kun valitset tietoliikenneratkaisua mobiilirobotille, pitää huomioida toiminta-alue, tiedonsiirtonopeus, virrankulutus ja turvallisuus. Toiminta-alueen on kommunikoitava riittävästi muiden laitteiden ja järjestelmien kanssa ympäristössään käyttäen asianmukaista tiedonsiirtonopeutta. Virrankulutuksen on oltava riittävän alhainen, jotta akun käyttöikä saadaan mahdollisimman pitkäksi. Turvallisuus on puolestaan kriittinen tekijä tietojen ja komentojen suojaamiseksi.
Bluetooth Low Energy on langaton viestintätekniikka, joka on suunniteltu alhaiseen virrankulutukseen, joten se on ihanteellinen akkukäyttöisille laitteille. Se tukee useita tiedonsiirtonopeuksia anturidatan ja ohjaussignaalien lähettämiseen mobiilirobotin ja muiden laitteiden välillä. Bluetooth LE:tä voidaan käyttää myös sisäpaikannusjärjestelmissä, jolloin robotit voivat navigoida dynaamisissa ympäristöissä.
Onsemin RSL15 on Bluetooth 5.2 -sertifioitu lähetin-vastaanotin helposti toteutettaviin langattomiin BLE-sovelluksiin. Se tukee AOA- (Angle of Arrival) ja AOD-ominaisuuksia (Angle of Departure) mahdollistaakseen tarkan sisäpaikannuksen. Erittäin integroitu yhden sirun radiojärjestelmä optimoi järjestelmän koon ja akun käyttöiän. Siinä on Arm Cortex-M33 -prosessori ja 2,4 GHz lähetin-vastaanotin, joka tukee Bluetooth LE 5.2- ja erilaisia asiakaskohtaisia protokollia 2,4 GHz alueella.
Yksittäiset mobiilirobotit vaativat myös sisäisen langallisen digitaalisen tiedonsiirron reaaliaikaista ohjauksen keskustietokoneen ja yksittäisten moottoriohjainten, valaistusohjaimien ja antureiden välillä. CAN (2 Mbps) tai CAN-FD (5 Mbps) ovat olleet tyypillinen valinta protokolliksi vuosien ajan. Molemmat protokollat kommunikoivat UTP-kaapelin (suojaamaton kierretty pari) kautta, ja yksittäiset solmut voidaan konfiguroida ketjutettuun, multi-drop -tyyppiseen typologiaan, mikä säästää kaapelin painoa ja kustannuksia.
Ethernet Alliance on esitellyt 10BASE-T1S-tekniikan (10 Mbps), joka on Ethernet IP -pohjainen digitaalisen tiedonsiirtoprotokolla, joka pystyy myös kommunikoimaan ketjutetussa topologiassa, jossa on vähintään 8 solmua vähintään 25 metrin UTP-kaapelilla yhdistettynä. Toinen vaihtoehto on yhden parikaapelin SPE (Single Pair Ethernet). 10BASE-T1S:n tärkein etu CANiin ja CAN-FD:hen verrattuna on nopeampi tiedonsiirto ja se, että kaikki data siirtyy IP-pohjaisesti keskustietokoneesta reunasolmuihin, mikä helpottaa tekoälyn ja koneoppimisen hyödyntämistä.
Onsemin NCN26010 on teollisuuden Ethernet-yhteyksiä varten kehitetty 10BASE-T1S -lähetin-vastaanotin, joka mahdollistaa multi-drop-yhteydet teollisuussovelluksissa käyttämällä olemassa olevaa kierrettyä parikaapelia. Tämä piiri on IEEE 802.3cg -yhteensopiva ja sisältää MAC-ohjaimen (Media Access Controller), datapakettien törmäyksiä estävän PLCA RS kerroksen (Reconciliation Sublayerin) ja 10BASE-T1S PHY-osan, joka on suunniteltu teolliseen monipiste-Ethernetiin. Se tarjoaa kaikki fyysisen kerroksen toiminnot datan lähettämiseen ja vastaanottamiseen yhden suojaamattoman kierretyn parin kautta, ja se voi kommunikoida isäntäohjaimen kanssa käyttämällä Open Alliancen MACPHY SPI -protokollaa.
Lopuksi
AMR-sovellusten määrä kasvaa edelleen eri toimialoilla. Ne ovat kuitenkin monimutkaisia järjestelmiä, jotka edellyttävät useiden erilaisten teknologioiden integrointia toimiakseen itsenäisesti, luotettavasti ja turvallisesti. Niiden menestys riippuu siitä, että käyttöön valitaan parhaat teknologiat jo suunnitteluvaiheessa.








 <
<








 Tekoäly on jo selkeästi ohittanut kokeiluvaiheen. Avnet Insights 2026 -selvityksen mukaan tekoäly on monilla elektroniikan aloilla jo mukana käytössä olevissa tuotteissa, ja sen soveltaminen yleistyy nopeasti kaikkialla EMEA-alueella.
Tekoäly on jo selkeästi ohittanut kokeiluvaiheen. Avnet Insights 2026 -selvityksen mukaan tekoäly on monilla elektroniikan aloilla jo mukana käytössä olevissa tuotteissa, ja sen soveltaminen yleistyy nopeasti kaikkialla EMEA-alueella.