Autoteollisuuden millimetriaaltotutkaa käytetään ihmisten ja kohteiden havaitsemiseen kehittyneissä kuljettajaa avustavissa järjestelmissä (ADAS) ja autonomisen ajamisen (AD) sovelluksissa. Ajoneuvon ulkopuolisen ympäristön valvontaan käytetään tyypillisesti tutkaa, kameroita ja LiDARia. ADAS auttaa kuljettajaa monissa ajotilanteissa, kuten törmäysvaroituksissa, automaattisessa jarrutuksessa ja pysäköintiavustuksessa. Autonomisessa ajamisessa sensoridataa käytetään ajoneuvon ohjaamiseen automaattisesti.
Autoteollisuuden millimetriaaltotutkaa käytetään ihmisten ja kohteiden havaitsemiseen kehittyneissä kuljettajaa avustavissa järjestelmissä (ADAS) ja autonomisen ajamisen (AD) sovelluksissa. Ajoneuvon ulkopuolisen ympäristön valvontaan käytetään tyypillisesti tutkaa, kameroita ja LiDARia. ADAS auttaa kuljettajaa monissa ajotilanteissa, kuten törmäysvaroituksissa, automaattisessa jarrutuksessa ja pysäköintiavustuksessa. Autonomisessa ajamisessa sensoridataa käytetään ajoneuvon ohjaamiseen automaattisesti.
|
Artikkelin kirjoittaja Tomohide Yamazaki työskentelee Anritsulla markkinoinnin johtajana. Hän on ollut yhtiön palveluksessa yli 18 vuoden ajana. Hänellä on tutkinto Hosein yliopistosta. |
Autotutka toimii yleensä 24 ja 76 gigahertsin taajuusalueilla. 24 GHz:n aluetta käytetään lyhyen ja keskipitkän kantaman ympäristön valvontaan esimerkiksi törmäyksen ennakointiin ja vaurioiden vähentämiseen sekä etu- ja taka-alueen tarkkailuun. Korkean erotuskykynsä ansiosta 76–77 GHz:n tutkaa käytetään pääasiassa 100–200 metrin päässä olevien esteiden havaitsemiseen. Tutkaa käytetään myös ajoneuvon sisätilojen havainnointiin. Esimerkiksi järjestelmät, jotka estävät lasten tai eläinten unohtamisen autoon, toimivat 60–77 GHz:n taajuusalueella. Taulukko 1 esittää eri alueilla käytettävät autoteollisuuden tutkataajuudet.

Taulukko 1: Autoteollisuuden millimetriaaltotutkan taajuusallokaatiot eri alueilla.
Tutkamenetelmät
Autotutkamittaukset perustuvat joko pulssimenetelmään tai taajuusmoduloituun jatkuva-aaltomenetelmään (FMCW). Pulssimenetelmä mittaa ajan, joka radiosignaalilta kuluu edestakaiseen kulkuun lähettimestä kohteeseen ja takaisin heijastuneena.
FMCW-menetelmässä kohteeseen lähetetään jaksollisia radiosignaaleja, joiden taajuus kasvaa lineaarisesti tietyn ajan kuluessa. Lähetetty ja heijastunut signaali interferoivat keskenään muodostaen ns. beat-signaalin. Analysoimalla taajuuseroa ja muita beat-signaalin parametreja voidaan määrittää kohteen etäisyys ja nopeus.
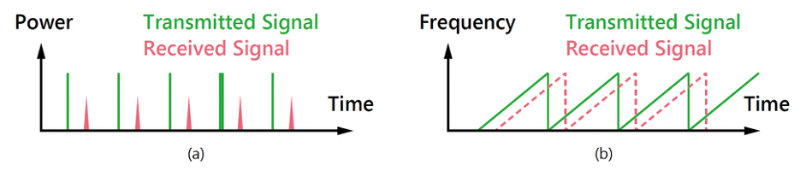
Kuva 1: Autotutkan signaalimodulaatiot – (a) pulssimenetelmä, (b) FMCW.
Toisin kuin pulssitutka, FMCW tarjoaa etuja kuten alhaisemman lähetystehon ja korkeamman signaali-kohinasuhteen. Lisäksi lähetinvastaanottimen suhteellisen alhainen vastetaajuus mahdollistaa yksinkertaisemman rakenteen, mikä alentaa kustannuksia. Siksi FMCW on laajimmin käytetty menetelmä autotutkissa.
FMCW:n perusteet
Signaalia, jonka taajuus kasvaa lineaarisesti ajan funktiona, kutsutaan chirpiksi, ja se on FMCW-tutkan suorituskyvyn keskeinen tekijä.
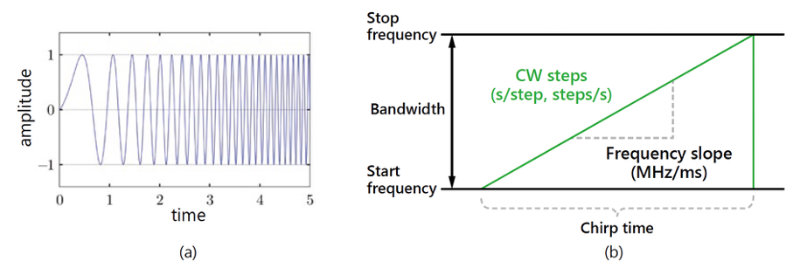
Kuva 2: Esimerkki chirp-signaalista.
Chirp-signaalista voidaan johtaa etäisyysresoluutio ja maksimihavaintoetäisyys. Etäisyysresoluutio saadaan kaavasta:
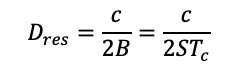
missä on valonnopeus, chirpin kaistanleveys, chirpin kulmakerroin ja chirpin kesto.
Mitä suurempi kaistanleveys, sitä parempi resoluutio. Esimerkiksi 2 GHz:n kaistanleveydellä resoluutio on noin 7,5 cm ja 4 GHz:llä noin 3,8 cm.
Maksimietäisyys on kääntäen verrannollinen chirpin kulmakerroin :ään. Pienempi kulmakerroin mahdollistaa pidemmän havaintoetäisyyden.
Kiinteällä chirpin kestolla suurempi kaistanleveys parantaa resoluutiota, mutta samalla kasvattaa kulmakerrointa ja pienentää maksimietäisyyttä. Tämä kompromissi on keskeinen suunnittelussa.
Autotutkassa painotus riippuu sovelluksesta. Mukautuvassa vakionopeudensäätimessä tärkeää on pitkä havaintoetäisyys, kun taas törmäyksenesto vaatii korkean resoluution lyhyellä etäisyydellä.
Nopeusresoluutio Vres ja maksiminopeus Vmax saadaan kaavoista:
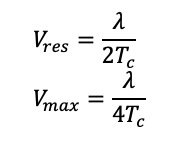
missä 
Maksiminopeus kasvaa chirpin keston pienentyessä, mutta tämä heikentää etäisyysresoluutiota.
Tutkakehys koostuu useista chirpeistä.
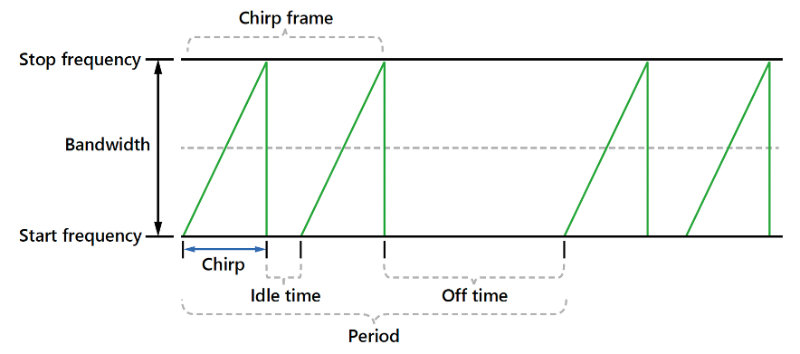
Kuva 3: FMCW-kehyksen ominaisuudet.
Kehyksen kesto on:
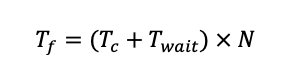
missä on odotusaika chirppien välillä ja chirppien lukumäärä.
Useiden chirppien käyttö mahdollistaa Doppler-tiedon saamisen ja siten kohteen nopeuden tarkan määrityksen. Kehysten välinen tauko voi parantaa energiatehokkuutta.
FMCW-signaalin mittaus
Chirp-signaalien mittaamista vaikeuttavat nopea taajuuden muutos, erittäin laaja kaista ja korkea taajuus. Usein kaikki nämä tekijät vaikuttavat samanaikaisesti.
Mittaukseen käytetään yleensä spektrianalysaattoria. Pyyhkäisevä analysaattori toimii peräkkäisellä näytteistyksellä, jolloin nopeita muutoksia ei aina saada talteen, mikä aiheuttaa niin sanottuja katvealueita.
Reaaliaikainen analysaattori käyttää FFT:tä ja pystyy seuraamaan nopeita muutoksia, mutta sen kaistanleveys on rajallinen. Autotutkan chirp-kaistat voivat ulottua kymmenistä megahertseistä kymmeniin gigahertseihin, joten mittaus vaatii useiden taajuusalueiden yhdistämistä, mikä voi jälleen aiheuttaa katveita.
Täydellisin ratkaisu saadaan yhdistämällä oskilloskooppi ja spektrianalysaattori. Oskilloskooppi tallentaa ajan ja taajuuden vasteen, analysaattori puolestaan tarkastelee taajuusominaisuuksia.
FMCW:n perussuorituskyvyn arviointi
Anritsun kompakti ultralaajakaistainen spektrianalysaattori MS2760A pystyy mittaamaan FMCW-signaalien keskeiset parametrit, kuten alku- ja lopputaajuuden, kaistanleveyden, amplitudin, kehysajan ja chirppien lukumäärän.
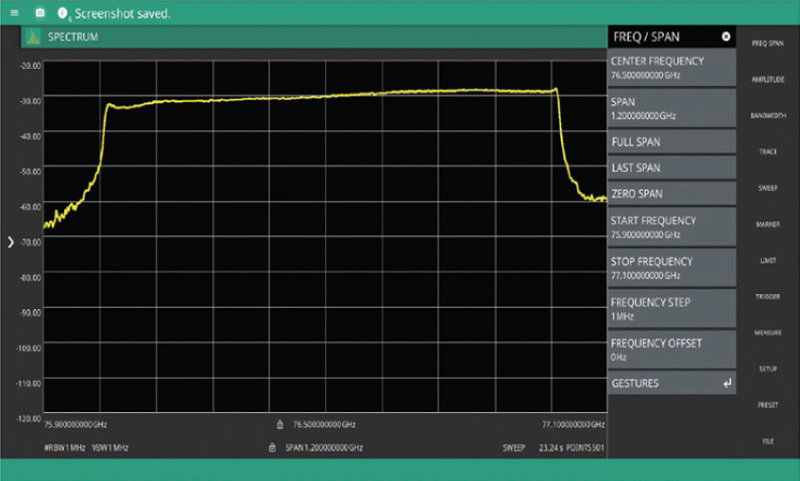
Kuva 4: FMCW-aaltomuodot yhden tutkakehyksen sisällä.
Laite kattaa jatkuvan taajuusalueen 9 kHz:stä 170 GHz:iin. Se on taskukokoinen ja soveltuu tuotantoon, testikammioihin ja kenttämittauksiin.
Tämä perustuu Anritsun NLTL-teknologiaan, joka eliminoi perinteisen sekoittimen tarpeen ja mahdollistaa erittäin korkeiden taajuuksien näytteistyksen.
Kompaktin kokonsa ansiosta useita analysaattoreita voidaan käyttää rinnakkain, mikä parantaa testauksen tehokkuutta ja vähentää projektiriskejä.
Yhteenveto
Millimetriaaltotutkan kehittyessä FMCW-menetelmä tuo mukanaan mittaushaasteita nopeiden taajuusmuutosten, laajan kaistan ja korkeiden taajuuksien vuoksi. NLTL-teknologia ratkaisee nämä ongelmat yhdellä ultralaajakaistaisella mittalaitteella. MS2760A tarjoaa kompaktin ja tehokkaan ratkaisun FMCW-tutkien testaukseen ADAS- ja autonomisen ajamisen sovelluksissa.