








 Tämän päivän edistyneimmät yksikaistaiset GNSS-vastaanottimet täyttävät V2X- ja ADAS-järjestelmien ja autonomisen ajamisen tarkkuusvaatimukset ihanteellisissa oloissa taivasalla. Jotta ne voisivat palvella tarkoitustaan aina ja kaiken aikaa, vastaanottimien täytyy ylittää puutteensa kaupunkioloissa ja muissa haastavissa ympäristöissä. Tämä artikkeli esittää, miten tähän päästään monitaajuisilla RTK-lokipaikannusjärjestelmillä, jotka käyttävät GNSS-korjauspalveluja dynaamisessa ajoneuvossa.
Tämän päivän edistyneimmät yksikaistaiset GNSS-vastaanottimet täyttävät V2X- ja ADAS-järjestelmien ja autonomisen ajamisen tarkkuusvaatimukset ihanteellisissa oloissa taivasalla. Jotta ne voisivat palvella tarkoitustaan aina ja kaiken aikaa, vastaanottimien täytyy ylittää puutteensa kaupunkioloissa ja muissa haastavissa ympäristöissä. Tämä artikkeli esittää, miten tähän päästään monitaajuisilla RTK-lokipaikannusjärjestelmillä, jotka käyttävät GNSS-korjauspalveluja dynaamisessa ajoneuvossa.
|
Artikkelin on kirjoittanut u-bloxin tuotepäällikkö Alex Ngi. Hän vastaa ns. lokipaikannuksen (Dead Reckoning) tuotestrategiasta. |
Satelliittipohjainen paikannus on ainutlaatuinen mahdollistaja V2X- ja ADAS-sovelluksille mukaan lukien autonomiset ajoneuvot. Se on ainoa tekniikka, joka pystyy määrittelemään auton absoluuttisen sijainnin reaaliajassa. Se toimii itsenäisesti suhteessa karttoihin, kameroihin ja maamerkkeihin. Ja koska sen toiminta on täysin erillään muista itseajavissa autoissa käytettävissä aistintekniikoista (kuten LiDAR, kamerat ja ultraääni), se muodostaa perustan monianturiverkolle, jota mikä muu teknologia ei tuo.

Tällä hetkellä GNSS-vastaanotintekniikka on korjaamassa omia luontaisia rajoituksiaan yksi kerrallaan. Tarkkuus paranee muutamiin kymmeniin senttimetreihin ja tarkka paikkatieto saadaan signaalin katkeamisen jälkeen sekunneissa. Vastaanottimien latenssi eli viive mittauksen ja paikkatiedon raportoinnin välillä on noin 10 millisekuntia. Paikkatietoa voidaan päivittää selvästi nopeammin kun 10 hertsin taajuudella. Lisäksi teknologisilla parannuksilla paikannus yltää syvälle kaupunkien keskustoihin, monikerroksisten risteysten alle ja muihin hankaliin paikkoihin.
Lyhyesti sanottuna GNSS-tekniikka on vihdoin teknologisesti kypsä V2X- ja ADAS-sovellusten aikakaudelle.
Kaikki kehitys ei ole kuitenkaan tapahtunut GNSS-vastaanottimessa. Mooren laki kutisti tarvittavan laitteiston pieneksi piiriksi, joka sopi kannettavien vähävirtaisten laitteiden massatuotantoon. Kaikkialla käytössä oleva internet-yhteys mahdollisti GNSS-korjauspalvelut, jotka minimoivat ilmakehän vaikutukset GNSS-tarkkuuteen, mikä on tärkein paikannusvirheiden lähde. Lisäksi kansalliset ja kansainväliset investoinnit avaruussektorille toivat käyttöömme uusia satelliittiverkkoja, jotka on suunniteltu innovatiivisia sovelluksia varten. Nämä tuovat lisäsatelliittien hyödyn vastaanottimiin.
Nämä edistysaskeleet tuovat teillemme ajoneuvoja, joissa on uusimman sukupolven monitaajuisia, useaa satelliittisignaalia vastaanottavia GNSS-laitteita, jotka pystyvät yltämään alle metrin tarkkuuteen, ja jopa muutamien kymmenien senttimetrien tarkkuuta sovelluksen vaatimuksista riippuen.
Kyse ei kuitenkaan ole vain parantuneesta paikannustarkkuudesta. Alhainen latenssi on toinen kriittinen vaatimus uusissa nousevissa sovelluksissa, kuten V2X-yhteyksissä (vehicle-to-everything). V2X:ssä ajoneuvot keskustelevat toistensa ja tienvarren infran kanssa käyttäen langattomia viestejä, välittäen varoituksia ja informaatiota esimerkiksi risteysliikenteestä, neuvottelemalla etuajo-oikeuksista ohittaessa ja kaistaa vaihtaessa.
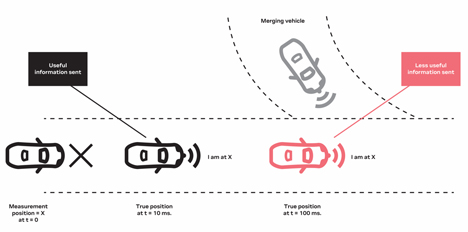
Kuva 1: Latenssin vaikutus V2X-käytössä.
Parhaimmillaankin pitkät latenssit voivat olla riesa, joka johtaa tarpeettomaan jarrutteluun ja kiihdyttelyyn, heikentää rekkajonojen ajotehokkuutta ja tekee matkustamisesta epämukavaa. Pahimmillaan ne voivat olla hengenvaarallisia, erityisesti moottoriteillä, jossa auto kulkee auton pituisen matkan sekunnin kymmenesosassa. ETSI:n (European Telecommunications Standards Institute) V2X-standardi määrää, että useimmissa tapauksissa järjestelmätason latenssi on alle 100 millisekuntia.

Taulukko 1: Taulukko kokoaa yhteen autoilun erilaisten sovellusten vaatimukset. Huomaa, että kaikki sovellukset vaativat lokipaikannustekniikkaa. CEP50-arvo vastaa ympyrän sädettä, joka kattaa 50 prosenttia kaikista paikkamittauksista.
Edistynyt anturifuusio – nopea paikkatieto
Jotta ADAS-, V2X- ja lopulta robottiautosovellukset olivat toteutettavissa, GNSS-vastaanottimien täytyy tuottaa luotettavasti kaistan tarkka paikkatieto myös haastavissa olosuhteissa. Kun satelliittisignaalit eivät kuulu, vastaanottimen täytyy palauttaa tarkka sijaintiratkaisu sekunneissa. Tämä onnistuu yhdistämällä joukko täydentäviä elementtejä, jotka voidaan toteuttaa yhdellä anturifuusiosuotimella. Tämä on esitetty alla.
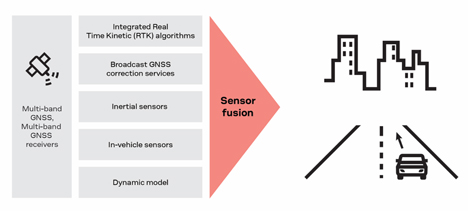
Kuva 2. Yksisiruinen anturifuusiosuodin tarkkaan paikannukseen.
Monijärjestelmä-, monitaajuus-vastaanotin: Globaalien satelliittijärjestelmien määrän kasva yhdestä (GPS) neljään (GPS, GLONASS, Beidou, Galileo) tarkoittaa, että vastaanottimet ”näkevät” enemmän satelliitteja mistä tahansa paikasta. Tämä enemmän kuin korvaa tarpeen lisätä vastaanottimien määrää, jotta niiden sijainti saataisiin määritettyä varmasti ja yksiselitteisesti: yhden verkon alueella neljä, kolmen ollessa käytettävissä seitsemän satelliittia (jotta voidaan laskea verkkojen väliset aikaerot, koska niillä on toisistaan eroavat aikareferenssit).
Lisäsatelliittien lisäksi monitaajuusvastaanottimet voivat yhdistää signaaleja eri taajuuksilla, joilla kaikilla on omat sovelluskohtaiset etunsa. Esimerkiksi kahden eri taajuudella tulevan signaalin prosessointi samanaikaisesti poistaa jopa 99,9 prosentin ilmakehän aiheuttamasta virheestä. Toinen tekniikka, jota kutsutaan geometria-vapaaksi yhdistämiseksi (geometry-free combination) auttaa tunnistamaan kellojaksojen vaihtelut kantoaallon vaiheessa. Nämä tekniikat ovat mahdollisia vain monitaajuusvastaanottimissa.
Integroidut RTK-algoritmit (Real Time Kinetic):
Kun standardit GNSS-vastaanottimet seuraavat ainakin neljän GNSS-satelliitin signaalin koodivaihetta, suurtarkkuuksiset vastaanottimet seuraavat korkeataajuisia signaaleja. Ratkaistakseen kantoaallon vaiheen epäselvyydet nämä vastaanottimet käyttävät RTK-algoritmeja, jotka joissakin tapauksissa on integroitu vastaanotinmoduuliin. RTK-algoritmit hyödyntävät laajasti langattoman yhteyden kautta tullutta korjausdataa. Autopaikannukseen sopivat ihanteellisesti matkapuhelinverkossa ja L-kaistalla tapahtuva tietoliikenne. Sen lisäksi, että L-alueen vastaanottimessa voidaan säästää datanlähetyskustannuksissa, ne voivat vastaanottaa RTK-korjausdatan satelliitin kautta jopa maaseudulla, missä matkapuhelinyhteydet ovat huonot tai eivät ollenkaan käytettävissä.
Broadcast-tyyppiset GNSS-korjauspalvelut: GNSS-korjauspalveluja tarjoavat arvioivat jatkuvasti GNSS-signaalivirheitä monitoroimalla niitä tukiasemaverkosta. Esimerkiksi PPP-RTK-palvelut (precise point positioning RTK) kompensoivat satelliitin kellosignaalin, kiertoradan, signaalivirheen, globaalin ja alueellisen ilmakehän ja troposfäärin vaikutuksia. Ihannetilanteessa korjaukset olisivat päteviä laajoilla maantieteellisillä alueilla kuten koko Yhdysvaltain alueella, ja niillä olisi minimaaliset kaistavaatimukset. Siinä missä aiemmat palvelut lähettivät räätälöidyt korjaussignaalin yksittäisillä käyttäjille karkea sijaintiarvion perusteella, nykyaikaiset palveluntarjoajat ovat omaksuneet skaalattavamman lähestymistavan: ne lähettävät saman dynaamisen GNSS-virhemallin kaikille käyttäjille.
Parantuneen GNSS-vastaanottimen tarkkuuden lisäksi laadukas korjausdata lyhentää sitä aikaa, mikä vastaanottimelta kuluu päästä tarkkaan sijaintitiedon arvioon. Tämä on kriittisen tärkeää normaaleissa ajo-oloissa, joissa on yläpuolella olevia esteitä, kuten sillat, moottoritien merkinnät, puut ja sillat, jotka voivat hetkellisesti katkaista GNSS-signaalit.
Liikeanturit ja anturifuusio: Liikeantureita on lisätty GNSS-vastaanottimiin jo useiden vuosien ajan. Mahdollistamalla lokipaikannuksen (dead reckoning) ne auttavat ajoneuvoja ylittämään GNSS-paikannuksen kuilut tunneleissa, pysäköintilaitoksissa ja muissa haastavissa, mutta niin yleisissä ympäristöissä. Fuusioimalla liikeanturin yksittäisten komponenttien keräämää dataa paikannusmoduuli voi jatkaa sijaintitietoavion toimittamista myös ympäristössä, johon satelliittisignaali ei yllä.
Liikeanturit ja anturifuusio auttavat paikannusratkaisua säilyttämään informaation sijainnista ja nopeudesta, kun paikannussignaalin vastaanotto lyhytaikaisesti keskeytyy. Tämä lyhentää sitä aikaa, joka tarkan sijaintitiedon laskemiseen kuluu sen jälkeen, kun satelliittisignaalit tulevat taas käytettäviksi.
Auton anturit: Lokipaikannuksen suorituskykyä voidaan entisestään parantaa tuomalla mukaan dataa auton omista antureista kuten renkaan pyörimisanturista. Algoritmit voivat hylätä GNSS-epätarkkuuksien raportoimat sijaintimuutokset, jotka aiheutuvat signaaliesteistä, vain tietämällä, ettei rengas ole liikkunut. Nopeuslukema yhdessä renkaan pyörimisanturin kanssa on tarkempi kuin järjestelmä, joka nojaa kohinaisen kiihtyvyysanturin mittauksiin. Lisäksi anturikalibrointia, joka määrittelee jokaisella pyörähdyksellä kuljettavaa matkaa, tehdään jatkuvasti. Se pystyy ottamaan huomioon kesä- ja talvirenkaiden aiheuttamat pienet erot.
Dynaaminen malli: Ajoneuvon dynaaminen malli pienentää mittausvirheiden vaikutusta raportoituun sijaintiin. Malli olettaa, ettei ajoneuvo liu´u sivusuunnassa, hyppää pystysuunnassa tai kiihdytä millään tavalla järjettömästi. Kaikkien GNSS-mittausten pätevyys tarkistetaan ennen kuin niitä käytetään navigoinnissa.
Suorituskyvyn mittaaminen tunneleissa
Suorituskyvyn mittaaminen edellä mainitussa tunneliskenaariossa on haastavaa. Ensisijainen virheen lähde ovat anturivirheet ja näiden määrä kasvaa, kun niitä käytetään määrittämään ajoneuvon nopeus (kiihtyvyysanturit) ja asento (gyroskooppi eli kulmanopeusanturi) pääsääntöisesti satunnaisten ilmiöiden perusteella systemaattisten sijaan. Jotta näiden vaikutus voidaan kunnolla karakterisoida, täytyy ajaa ja kerätä dataa tilastollisesti riittävästä määrästä tunneleita.
Toiseksi ei ole olemassa mitään ilmeisen ”oikeaa” sijaintia, johon mittauksia verrataan. Ihanteellisessa tilanteessa käytetään toista johonkin täysin toiseen teknologiaan perustuvaa paikannustekniikkaa tunneleiden sisällä vertauskohtana, johon taivaan ”puuttuminen” ei vaikuta. Ja lopulta jopa kaikkein kalleimmat liikeantureihin perustuvat referenssijärjestelmät heittelevät jonkin verran.
Sen sijaan, että testaisimme vastaanottimia oikeita järjestelmiä vastaan oikeissa tunneleissa, me ensin loimme virtuaalisen tunnelin käyttämällä avoimen taivaan alla kerättyä dataa. Tehdäksemme näin me otimme GNSS-vastaanottimen pois päältä simuloidaksemme signaalin puuttumista, pakottaen järjestelmän navigoimaan lokipaikannusmoodissa. Tämän ansiosta pystyimme vertaamaan liikeanturiyksikön suorituskykyä todelliseen tilanteeseen. Yhdistämällä lokipaikannusratkaisun mittaukset ja huippuluokan GNSS-referenssivastaanottimen lukemat saimme tarvittavan datan, jolle pystyimme emuloimaan eripituisia tunneleita datasarjojen näytteistä. Tämä oli yksinkertainen temppu, jolla pystyimme tekemään riittävästi testiajoja kvalifioidaksemme lokipaikannuksen suorituskyvyn tilastollisesti merkittävällä tavalla.
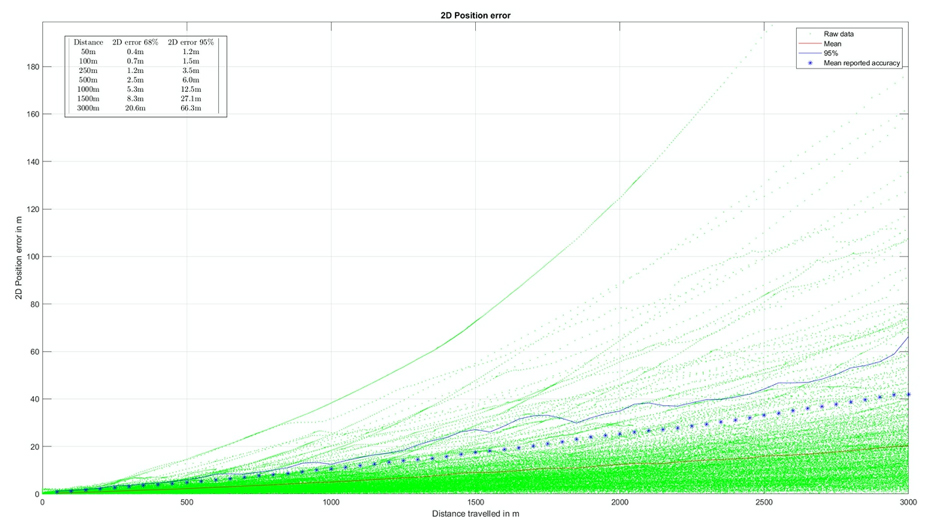
Kuva 3. Sijaintivirhe lokipaikannuksessa.
Ylläolevasta kuvasta näkyy, että analysoimalla dataa 31 testiajon aikana generoidusta 1758 signaalin puuttumisesta pystyimme määrittelemään, että paikannusvirheemme oli noin kaksi prosenttia kuljetusta matkasta lokipaikannusmoodissa. Toisin sanoen jokaista ajettua kilometriä kohti paikannusvirhe kasvoi keskimäärin 20 metriä. Kannattaa huomata, että liikeanturiyksikön suorituskyky vaikuttaa suureksi tunnelitestin tuloksiin. Omassa testijärjestelyssämme käytimme standardi liikeanturimoduulia, jonka suorituskyky oli enemmänkin keskimääräinen kuin huippuluokkaa.
Kokeiltu ja testattu asfaltilla
Tunnelisimulaatiot olivat vain osa laitteen laajempaa testisarjaa. Validoidaksemme, että esitellyt teknologiat – eli monitaajuinen, useaa satelliittiverkkoa kuuntelevan GNSS-vastaanotin, johon on sisäänrakennettu RTK-algoritmit, GNSS-korjausdatan jako broadcast-menetelmällä, liikeanturiyksikkö lokipaikannukseen, ulkoinen pyörän pyörimisanturi ja dynaaminen ajoneuvomalli – tuottavat luotettavasti kaistatarkan paikannuksen, testasimme yhdistelmää myös eritasoisissa monimutkaisissa skenaarioissa. GNSS- ja liikeanturivirheiden satunnaisuuden vuoksi yksittäiset testiajot voivat poiketa alla esitetyistä tuloksista sekä ylös- että alaspäin.
Erässä testiajossa maantiellä, pääosin avoimen taivaan alla – yksi vähiten haastavista testitapauksistamme – pystyimme vahvistamaan, että ratkaisumme tuottaa 100 prosentin käytettävyyden ja tuottaa paikkatiedon 50 prosenttia ajasta 5,8 sentin tarkkuudella. Nopeusmittaus oli tarkkuudeltaan 0,02 km/h päässä oikeasta nopeudesta 68 prosenttia ajasta.
Testimme aikana huomasimme, että RTK-fix- (signaalivaiheen virheet korjattu) ja RTK-float-tiedon (signaalivaiheen virheet korjaamatta) sekä lokipaikannuksen tarkkuus heitteli (82 prosentista 14,8 prosenttiin ja lokipaikannuksen 3,1 prosenttiin). Ylipäätään kävi ilmi, että ratkaisun tarkkuus parani kymmenkertaisesti olemassa oleviin yksitaajuisiin vastaanotintekniikoiden verrattuna. Täytyy kuitenkin huomata, että RTK-fix- ja RTK-float-arvojen absoluuttinen vertailu voi olla harhaanjohtavaa. Tietyssä vastanottimessa se voi ilmaista hyvin erilaisten testiratojen suhteellisen vaikeuden, kun arvioidaan saavutettua tarkkuutta. Jos verrataan kahta eri vastaanotinta, se on vähemmän käyttökelpoinen lukema.
Testitulokset avoimen taivaan alla maantiellä ja tyypillisessä kaupunkiympäristössä Pariisissa osoittivat erinomaisen suorituskyvyn parantumisen verrattuna yksitaajuiseen, ilman RTL-korjausta tehtyyn mittaukseen. Huonoimmassa kaupunkikanjoniskenaariossa (urban canyon), jota testattiin Pariisin La Défensessa, suorituskyky ylitti edelleen V2X-sovellusten vaatimukset. Vaikka GNSS-vastaanotin ei pystynyt täysin ratkaisemaan signaalivaiheen kokonaislukuvirhettä, CEP68-arvo1 (ks. viite) oli noin 1,1 metriä. Sovelluksen tarkkuus oli vähintään 1,7 metriä 95 prosenttia ajasta. Tämä osoittaa selvästi, miten teknologia voi parantaa paikannuksen suorituskykyä haastavimmissa kaupunkiolosuhteissa.
Lopulta testasimme ratkaisumme suorituskykyä kahden kilometrin mittaisessa tunnelissa Ruotsin Göteborgissa, jossa se toimi paremmin kuin laajoissa simulaatioissamme. Poikkeama oli 50 prosenttia odottamaamme pienempi. Lisäksi paluu kaistatason tarkkuuteen vei vain kaksi sekuntia. Tämä perustui monen tekijän yhdistelmään: monitaajuusvastaanottimet, GNSS-korjauspalvelut ja suhteellisen tarkka arvio sijainnista lokipaikannuksen perusteella. Selvästikään kaistantarkkaa paikannusta ei voida säilyttää pitkässä tunnelissa. Niissä pitkälle automatisoidut ja jopa autonomiset ajoneuvot voivat paikata tarkkuuden puutetta käyttämällä täydentäviä paikannustekniikoita.

Taulukko 2. Avoin taivas: moottoritieajoa Bourgognessa, Kaupunkiajo Pariisin kaupunginosissa 12-16, ”kaupunkikanjoni”: La Défensen alue Pariisissa.
Ilmiselvä lisäarvo auton GNSS-paikannukselle
Johtopäätöksenä voidaan todeta, että paikannusratkaisut, joissa yhdistetään monitaajuinen useaa satelliittijärjestelmää kuuntelevat GNSS-vastaanottimet, joihin on sisäänrakennettu RTL-algoritmit, broadcast-tyyppinen GNSS-korjausdatan lähetys, liikeanturiyksikkö lokipaikannusta varten, ulkoinen renkaanpyörintäanturi ja dynaaminen ajoneuvomalli pystyvät tuottamaan jatkuvan kaistatarkan paikannuksen jopa kaikkein haastavimmissa ympäristöissä. Tätä tarkkuutta voidaan edelleen parantaa fuusioimalla mukaan ajoneuvon muiden anturien, kuten kameroiden ja tutkien informaatiota. Tämän myötä liikennejärjestelmästämme tulee turvallisempi, käyttömukavampi ja tehokkaampi. Näin GNSS-tekniikka täydennettynä lokipaikannuksella on valmis edistyneisiin ajoneuvosovelluksiin.
Testiemme perusteella ratkaisujen suorituskyky ylittää nykyisten tarkkuuden kymmenkertaisesti- Jatkuva palvelu kaupunkioloissa saavutetaan kaikkien yllä mainittujen tekniikoiden tehokkaalla yhdistämisellä. Niiden tarkkuuden ja globaalin käytettävyyden ja sen tosiasian, että satelliittipaikannus antaa ainoan absoluuttisen varman tiedon sijainnista ja ajasta, ansiosta edistyneet ajoneuvosovellukset tulevat väistämättä hyötymään tekniikoiden integroinnista.
----------
1 Tässä yhteydessä lukema CEP68 (joka on lyhennys ympyrävirheen 68 prosentin todennäköisyydestä, circular error probability), tarkoittaa, että 68 prosenttia mittauksista ovat 1,1 metrin sisällä GNSS-vastaanottimen todellisesta sijainnista kaksiulotteisella pinnalla.
 ETN:n digitaalinen aikakauslehti ETNdigi 1/2026 on julkaistu. Uusi numero kokoaa yhteen elektroniikka-alan keskeisiä teknologiateemoja kvanttilaskennasta ja tekoälystä energiatehokkaaseen tehoelektroniikkaan, IoT-järjestelmiin ja ajoneuvojen latausinfrastruktuuriin.
ETN:n digitaalinen aikakauslehti ETNdigi 1/2026 on julkaistu. Uusi numero kokoaa yhteen elektroniikka-alan keskeisiä teknologiateemoja kvanttilaskennasta ja tekoälystä energiatehokkaaseen tehoelektroniikkaan, IoT-järjestelmiin ja ajoneuvojen latausinfrastruktuuriin.
 Nokian toimitusjohtaja Justin Hotard arvioi yhtiön Yhdysvaltain arvopaperimarkkinavalvoja SEC:lle toimittamassa Form 20-F 2025 -vuosiraportissa, että mobiiliverkkomarkkina ei ole lähivuosina varsinainen kasvuala. Hänen mukaansa markkinan odotetaan pysyvän lähinnä vakaana samalla kun Nokia keskittyy parantamaan liiketoiminnan kannattavuutta.
Nokian toimitusjohtaja Justin Hotard arvioi yhtiön Yhdysvaltain arvopaperimarkkinavalvoja SEC:lle toimittamassa Form 20-F 2025 -vuosiraportissa, että mobiiliverkkomarkkina ei ole lähivuosina varsinainen kasvuala. Hänen mukaansa markkinan odotetaan pysyvän lähinnä vakaana samalla kun Nokia keskittyy parantamaan liiketoiminnan kannattavuutta.














 Lääkintälaitteiden internet (IoMT) yhdistää diagnostiikan, puettavat anturit ja sairaalalaitteet pilvipohjaisiin järjestelmiin. Etävalvonta, reaaliaikainen data ja koneoppiminen lupaavat parempaa hoidon laatua ja kustannussäästöjä, mutta samalla ratkaistavaksi jäävät yhteentoimivuus, sääntely ja tietoturva.
Lääkintälaitteiden internet (IoMT) yhdistää diagnostiikan, puettavat anturit ja sairaalalaitteet pilvipohjaisiin järjestelmiin. Etävalvonta, reaaliaikainen data ja koneoppiminen lupaavat parempaa hoidon laatua ja kustannussäästöjä, mutta samalla ratkaistavaksi jäävät yhteentoimivuus, sääntely ja tietoturva.