








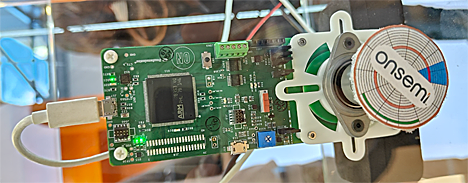
Tarkkaa tietoa asennosta tarvitaan vaikkapa robottikädessä. Asento määritetään tyypillisesti joko optisella tai magneettista mittaamista hyödyntävällä anturilla. Tulevaisuudessa anturi voi yhä useammin olla induktioon perustuva, kertoo onsemi.
Yhtiö esitteli parin viikon takaisilla Electronica-messuilla pyörivän NCS32100-asentoanturin, joka tuo ensimmäisenä induktiivisena anturina suuren nopeuden ja tarkkuuden teollisiin sovelluksiin. NCS32100 käyttää uutta, onsemin äskettäin patentoimaa lähestymistapaa induktiiviseen asennontunnistukseen, mikä tekee siitä ihanteellisen valinnan teollisuus- ja robottisovelluksiin, joissa käytetään nopeasti liikkuvaa robotiikkaa ja koneita.
Vaikka induktiivisten anturien ominaisuudet tekevät niistä erittäin houkuttelevia teollisiin sovelluksiin, ne ovat historiallisesti kärsineet rajoituksistaan: ne eivät sovi kohteisiin, joissa vaaditaan suurta tarkkuutta ja suurta pyörimisnopeutta. NCS32100-anturin kohdalla onsemi hyödynsi yli 20 vuoden asiantuntemustaan induktiivisten antureiden suunnittelussa yhdistääkseen induktiivisten kooderien luotettavat edut tarkkuuteen ja nopeuteen, joka yleensä liittyy keski- ja huippuluokan optisiin koodereihin.
38 mm:n anturia käyttämällä laite tuottaa +/-50 kaarisekunnin tarkkuuden 6000 kierroksen minuuttinopeudella. Jos pienempi tarkkuus riittää, NCS32100 tukee jopa 100 000 RPM nopeuksia.
NCS32100a-anturin laiteohjelmisto lähettää suoraan absoluuttisen sijainnin ja nopeuden esiladattuna sen integroituun mikro-ohjaimeen. Tämä tarkoittaa helppoa "plug and play" -tyyppistä ratkaisua asentotiedon hyödyntämiseen. NCS32100:n integrointitaso lyhentää merkittävästi laitesuunnitteluun kuluvaa aikaa ja tarvittavien ulkoisten komponenttien määrää.
Induktiivisilla antureilla on useita keskeisiä ominaisuuksia, jotka tekevät niistä haluttavia teollisissa sovelluksissa. Ne kestävät hyvin lähes kaikenlaisia häiriöitä, kestävät hyvin mekaanista tärinää ja lämpötilavaihtuvuutta. NCS32100-anturissa on myös integroitu kalibrointirutiini, joka ottaa huomioon anturin mekaanisen kohdistusvirheen.











 Suuren nopeuden Ethernet-muuntajien tulee täyttää nykyaikaisille, tehokkaille verkkolaitteille asetetut vaatimukset. Niiden tehtävänä on turvata luotettava ja varma datansiirto, optimoida signaalin laatu ja tehostaa verkon yleistä suorituskykyä ja kapasiteetin hyödyntämistä.
Suuren nopeuden Ethernet-muuntajien tulee täyttää nykyaikaisille, tehokkaille verkkolaitteille asetetut vaatimukset. Niiden tehtävänä on turvata luotettava ja varma datansiirto, optimoida signaalin laatu ja tehostaa verkon yleistä suorituskykyä ja kapasiteetin hyödyntämistä.