











Jotkut sovellukset maatalouden, rakentamisen ja maanmittauksen, geologian ja robotiikan sekä katastrofien hallinnan aloilla voidaan toteuttaa vain, jos saatavilla on riittävä paikannustarkkuus. RTK- eli Real-Time Kinematic -tekniikka mahdollistaa erittäin tarkan paikantamisen noin 2 senttimetrin tarkkuudella reaaliajassa.
Kirjoittaja Stephan Menze, Rutronik
Tämäntyyppinen paikannus tarjoaa valtavia mahdollisuuksia tehokkuuden lisäämiseen ja resurssien säästämiseen, mutta on myös erittäin monimutkainen tekniikka. Yhdessä Wireless Competence Centerin kanssa Rutronik System Solutions on ratkaissut tämän ongelman ja luonut RAB4-sovitinkortin RTK-sovelluksiin, joka antaa yrityksille nopean pääsyn tähän mullistavaan teknologiaan.
Komponenttien jakelija Rutronik on ollut tietoinen reaaliaikaisen kinematiikan suuresta merkityksestä ja sen positiivisesta vaikutuksesta kohdesovelluksiin ja -markkinoille, kuten automaattitrukkeihin, drooneihin, robotteihin ja älykkääseen viljelyyn. Rutronik Wireless Competence Center tarjoaa uusimpien huipputeknisten ratkaisujen lisäksi yksilöllistä tuote- ja järjestelmäkonsultointia, jossa korostetaan myös antennikonsepteja, teholähteitä ja korjausarvojen radiotiedonsiirtoa.
Alla on ETNdigi-lehdessä ilmestynyt artikkeli kokonaisuudessaan. Lehteä pääsee lukemaan täällä.
POSITIONIN DOWN TO 2 CM IN REAL TIME
Inaccurate positioning is a potential source of error. However, some applications in the fields of agriculture, construction and surveying, geology and robotics as well as disaster control can only be realised if the corresponding precision is available. With Real-Time Kinematic (RTK), a technology is now becoming economically attractive that enables high-precision positioning down to approximately 2 cm in real time.
This type of positioning offers enormous potential for increasing efficiency and conserving resources, but is also an extremely complex technology. Together with the Wireless Competence Centre, Rutronik System Solutions has tackled this issue and created the RAB4, an adapter board for RTK applications that gives companies fast access to this pioneering technology.
FROM THE IDEA TO THE BOARD
Distributor Rutronik has been aware of the high relevance of real-time kinematics and its positive influence on target applications and markets such as AGVs, drones, robots and smart farming for several years. The Rutronik Wireless Competence Centre not only offers the latest state-of-the-art solutions with products from Unicore Communication, but also individual product and system consulting, which also highlights antenna concepts, power supplies and the radio data transmission of correction values.
Rutronik can draw on the portfolio of around 250 other electronics suppliers and thus put together a complete GNSS system from a single source for each specific application - from the Xeon high-performance server and cloud-based device management with optional geofencing rules to the status LED.
Rutronik System Solutions has developed the RAB4 in close cooperation with the wireless division to help customers who could imagine an RTK solution for their applications but are hesitant about the complexity of a corresponding system. This is an adapter board that can be used to quickly test the performance of the technology without having to develop your own hardware. This reduces the time and costs involved in the pre-development phase and applications reach market maturity more quickly. Another advantage of the RAB4 is that it can be easily combined with other developer boards from Rutronik System Solutions such as the RDK3 thanks to the Arduino interface. Coupled to the RDK3, for example, relative positioning is possible using a Bluetooth Low Energy connection.
WHAT THE DEVELOPER´S HEART DESIRES
The core elements of the RAB4 include the UM980 GNSS module from Unicore, a high-precision multi-constellation/multi-frequency RTK positioning module based on the GNSS SoC NebulasIV. It supports all currently available constellations and frequencies (GPS/BDS/GLONASS/Galileo/QZSS). With an RTK data update rate of 50 Hz, the module supports PPP including E6 HAS and BDS B2b. Instant RTK initialisation technology, 60 dB narrowband interference rejection and detection and Heading2 and highly accurate SA positioning technology ensure a stable and fast connection.
To fully and independently utilise the RTK technology, an internet connection is required, which is enabled by the second core element, the Telit Cinterion LTE C1 ThreadX GNSS module with 2G/3G fallback. This module offers a first-class 3GPP rel10 platform and is already designed for MTC functions according to 3GPP Rel.12. It allows easy integration with peripherals and actuators via USB 2.0 HS, UART and customisable GPIOs. The integrated TCP/IP and UDP/IP stacks ensure fast and uninterrupted data transmission.
The distributor even supplies its customers with the SIM card required for the integrated NanoSIM Card Connector from JAE (with 100 MB data volume), allowing developers to put the board into operation immediately.
Three different antennas from 2J are pre-installed on the RAB4 in order to be able to test which model is actually relevant for the planned application during pre-development:
- Cellular 4G LTE/3G/2G MIMO Magnetic Mount Antenna (2J6924MA): Specially developed and tuned for wireless MIMO technology, the dual cable antenna is capable of transmitting and receiving more than one data signal simultaneously. With its IP67/IP69 protection rating, it is also suitable for applications in more robust environments, such as agricultural machinery.
- GPS/GNSS/SBAS/RTK/L1/L2 dome antenna with magnetic mounting (2J7C01MC2F): It impresses with its high precision and accuracy in the centimetre range thanks to the combination of Precise Point Positioning (PPP) L1 and L2 with RTK. This component is an ideal choice for land and hydrographic surveying applications in particular, as it uses real-time error correction while maintaining centimetre-accurate positioning data.
- GPS/GLONASS/BeiDou/QZSS/Galileo/IRNSS/L1/L5 Dome Antenna (2J7C01MC3F): This model is also designed for high-precision and advanced signalling technologies and covers all major GNSS bands. The high-performance antenna impresses with its low power consumption (48 mW) and consistently high efficiency. Here too, the IP67/IP69 protection class enables use in demanding environments.
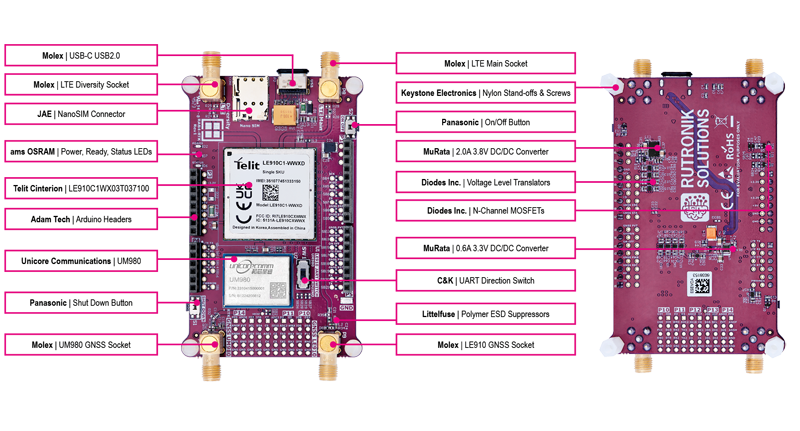
List of core components used in Rutronik´s RAB4 card.
FROM NICHE TO MASS MARKET
Until now, RTK was considered too complex and expensive to be used as an interesting alternative for positioning applications beyond niche markets such as agriculture. In the coming years, Rutronik sees a significant change in the choice of positioning technologies.
For example, RTK offers the possibility of ensuring the absolute positioning of e.g. agricultural machinery, AGVs or robots and enables the realisation of completely new, (partially) automated applications. This aspect, combined with the positive price trend, makes it very likely that RTK will establish itself as the sole technology in the future markets of Smart City, Smart Gardening and Smart Agriculture.
Rutronik also expects RTK to largely replace previously used technologies in the automotive market segment within the next few years. Every centimetre plus or minus makes a difference, especially in the case of expanding smart city solutions, such as intelligent car park searches or the efficient coordination of emergency vehicles.
With the complete package of board and comprehensive documentation, Rutronik now offers interested customers extremely simplified access to this promising technology and enables the development of new market segments.
RTK explained briefly & conciselyRTK uses two GNSS receivers for localisation: a base receiver and a rover receiver. The base receiver is in a fixed position and receives signals from satellites in order to obtain position information. These signals, or correction data, contain information about deviations from the expected value, for example due to atmospheric conditions. To do this, the base station calculates its own position using the signals received from GNSS satellites and compares them with its known, fixed position. Errors and deviations are recognised and a correction signal is generated, which is transmitted to the rover receiver in real time. The rover is placed where the position is to be measured, e.g. in the vehicle. This means that it usually has a mobile rather than a fixed position. Both receivers communicate with each other via a wireless connection. In this way, the rover receives the correction data from the base receiver and can increase the accuracy of the position calculation. Communication between the two receivers takes place via a base station, so that only an internet connection to it is required. The station with the strongest signal at the time of the enquiry is always selected. |
 Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.
Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.


















