











Renesas on tuonut markkinoille uuden RZ-sarjan mikroprosessorin tehokasta suorituskykyä vaativiin robotiikan sovelluksiin. RZ/V2H MPU:n tarjoama suorituskyky mahdollistaa sekä tekoälypohjaiset konenäkö- että reaaliaikaohjauksen sovellukset. Seuraavassa Renesasin Keigo Kawasaki tekee selkoa RZ-sarjan uuden jäsenen tuomista mahdollisuuksista robotiikan tekoälysovelluksiin.
Miten Renesasin tekoälyprosessori eroaa kilpailijoiden tarjonnasta?
Kolme merkittävintä erottavaa tekijää ovat:
- Karsintatekniikalla (pruning) varustettu tekoälykiihdytin DRP-AI3 – Karsintatekniikka on laitteistopohjainen lähestymistapa kooltaan pienien tekoälymallien toteuttamiseksi ja tekoälyn laskentatehon parantamiseksi. Tämä mahdollistaa 10 TOPS:n suoritustehon wattia kohden, mikä on kymmenkertainen parannus aikaisempiin malleihin nähden.
- Kuvankäsittelyn nopeutuminen tekoälykiihdyttimen lisäksi – Koko kuvausjärjestelmän suorituskyvyn parantamista varten RZ/V2H MPU:ssa on OpenCV-kiihdytin ja siihen kuuluva ilmainen OpenCV-kiihdytinkirjasto.
- Sovellusten käsittelyyn tarkoitetun neljän 1,8 gigahertsin Arm Cortex-A55 -ytimen lisäksi piiri on varustettu reaaliaikaista ohjaustehoa varten kahdella 800 megahertsin Cortex-R8-ytimellä ja vähemmän laskentatehoa vaativien tehtävien suorittamista kuten anturidatan vastaanottamista varten Cortex-M33-ytimellä. Renesasin RZ/V2H on ainoa heterogeeninen tekoälyprosessori, jossa on kaikki kolme Armin Cortex-ydintä (A, R, M).
Mitkä ovat tekoälypohjaisen konenäön haasteet erityisesti sulautetuissa järjestelmissä? Mikä on Renesasin ratkaisu?
Suurin haaste sulautetuissa järjestelmissä on lämmön muodostuminen. Kun suurella teholla tapahtuva käsittely synnyttää lämpöä, suunnittelijat vastaavat usein haasteeseen siirtämällä lämpöä pois joko vähentämällä suoritustehoa tai lisäämällä lämpöä pois siirtäviä komponentteja, mikä puolestaan kasvattaa kustannuksia ja järjestelmän kokoa. Tekoälyn suoritustehon ollessa 10 TOPS:a wattia kohden Renesasin RZ/V2H selviytyy helposti suurta suoritustehoa vaativista tekoälyä hyödyntävistä konenäkösovelluksista ilman, että tarvitaan tuuletinkomponentteja.
Missä sovelluksissa tarvitaan reaaliaikaista kuvankäsittelyä?
Teollisuusautomaation roboteilta sekä ravintoloiden ja kaupallisten tilojen palveluroboteilta edellytetään reaaliaikaista kuvankäsittelyä. Näiden robottien pitää tunnistaa ympärillä olevat kohteet ja esteet reaaliaikaisesti pystyäkseen liikkumaan itseohjatusti. Myös dronien ja pienten kuljetusvälineiden tulee pystyä toimimaan itseohjautuvasti reaaliaikaisesti. RZ/V2H MPU soveltuu hyvin tällaisiin sovelluksiin.
Minkälaista palautetta asiakkaat ovat antaneet?
Useat asiakkaat ovat jo siirtymässä käyttämään Renesasin tekoälymoduuleja teollisuuden sovelluksissa ja pikkumoduuleja henkilöä avustavissa roboteissa. Lisäksi ainakin 40 asiakasta on harkitsemassa käyttöönottoa tällä hetkellä. Ratkaisevaksi tekijäksi näissä käydyissä keskusteluissa on osoittautunut RZ/V2H MPU:n kyky merkittävästi hillitä lämmön muodostumista.
Mikä edesauttaa tekoälyä hyödyntävien konenäkösovellusten käyttöönottoa? Mikä on Renesasin strategia?
Tekoälyn tehokasta käyttöönottoa estää usein vallalla oleva käsitys, että tekoälyn soveltaminen suunnitteluissa vaatisi erityisiä taitoja. Renesas vastaa tähän haasteeseen tarjoamalla suunnittelijoiden käyttöön suuren joukon vapaasti käytettäviä tekoälysovelluksia sisältäviä kirjastoja.
Minkälaisia tulevaisuuden näkymiä Renesasilla on?
Teknologian osalta aiomme jatkaa wattikohtaisen suorituskyvyn (TOPS/W) parantamista edelleen. Oletamme, että tulevaisuudessa sulautettuja piirejä käytetään yhä suurempaa laskentatehoa vaativissa sovelluksissa kuten generatiivisessa tekoälyssä. Tuotteistamisen osalta pyrimme jatkossa vastaamaan asiakkaiden ja markkinoiden esittämiin tarpeisiin.
Mitä etuja tarjoaa Renesasin DRP-teknologia?
DRP (Dynamically Reconfigurable Processor) mahdollistaa sovellusten suorittamisen kytkemällä sirulla olevien aritmeettisten yksiköiden piirikytkentäkonfiguraatiota dynaamisesti kullakin kellojaksolla prosessoitavana olevan sisällön mukaisesti. Koska ainoastaan tarpeelliset aritmetiikkayksiköt ovat käytössä, DSP kuluttaa tehoa CPU:lla tapahtuvaa prosessointia vähemmän ja myös käsittely nopeutuu. Verrattuna CPU:lla tapahtuvaan prosessointiin, jossa suoritustehoa vähentävät välimuistihakuvirheistä ja muista tekijöistä aiheutuvat toistuvat ulkoiset muistihaut, DRP mahdollistaa tarvittavien datapolkujen muodostamisen sirulle. Tällä tavoin minimoidaan suorituskyvyn huononeminen ja pienennetään muistihauista johtuvaa toimintanopeuden vaihtelua (jitter).
DRP on myös varustettu dynaamisella uudelleen konfiguroitavalla toiminnolla, joka kytkee piirikytkentätiedon aina algoritmin muuttuessa mahdollistaen prosessoinnin rajoitetulla sirukapasiteetilla jopa sellaisissa robotiikkasovelluksissa, joissa joudutaan käyttämään useita algoritmeja. DRP on erityisen suorituskykyinen prosessoitaessa suoratoistodataa esimerkiksi kuvantunnistuksessa, jossa rinnakkaistoiminta ja liukuhihnoitus suoraan parantavat suorituskykyä.
Mitä etuja tarjoaa heterogeeninen arkkitehtuuri, jossa DRP-AI3, DRP ja CPU toimivat saumattomasti yhdessä?
Esimerkiksi palveluroboteissa tarvitaan kehittynyttä tekoälyyn perustuvaa prosessointia ympärillä olevan tunnistamista varten. Toisaalta algoritmiin perustuvassa prosessoinnissa, jossa ei käytetä tekoälyä, tarvitaan myös päätöksentekokykyä ja ohjausta robotin käyttäytymisen suhteen. Tarjolla olevien sulautettujen prosessorien (CPU:t) resurssit eivät kuitenkaan riitä, kun pitäisi suorittaa edellä mainittuja erilaisia prosessointeja reaaliaikaisesti. Ratkaisuna tähän Renesas on kehittänyt heterogeenisen arkkitehtuuriin perustuvan tekniikan, joka mahdollistaa tekoälykiihdyttimen (DRP-AI3), OpenCV-kiihdyttimen (DRP) ja keskusyksikön (CPU) yhteistoiminnan.
DRP-AI3 nopeuttaa tekoälyä hyödyntävää konenäön prosessointia. Renesas on soveltanut omaa DRP-tekniikkaansa ja kehittänyt OpenCV-kiihdyttimen nopeuttaakseen prosessointia OpenCV:llä, joka on konenäön prosessointiin tarkoitettu teollisuusstandardin mukainen avoimen lähdekoodin kirjasto. Tuloksena on CPU-prosessointiin verrattuna jopa 16 kertaa nopeampi prosessointi. DRP-AI3:n ja OpenCV-kiihdyttimen yhdistelmä tehostaa sekä tekoälylaskennan että kuvankäsittelyn algoritmejä, mikä mahdollistaa tehokkaasti ja reaaliaikaisesti tapahtuvan kamerapohjaisen SLAM-navigoinnin esimerkiksi robotti-imurin kaltaisissa sovelluksissa.
Toisaalta sellaiset ohjelmistot, joilla tehdään esimerkiksi robotin käyttäytymiseen liittyvää päätöksentekoa ja ohjausta, edellyttävät tarkkaa prosessointia suhteessa muuttuviin olosuhteisiin ja ympärillä tapahtuviin muutoksiin. Tällaisiin tapauksiin CPU:lla tapahtuva ohjelmistopohjainen käsittely sopii paremmin kuin esimerkiksi DRP:llä tapahtuva laitteistopohjainen käsittely. On tärkeää jakaa prosessointi suoritettavaksi oikeissa paikoissa ja operoida toimintaa koordinoidusti. Renesasin heterogeeninen arkkitehtuuri mahdollistaa DRP:n ja CPU:n yhteistoiminnan koordinoidusti.
Aikooko Renesas kehittää neuroprosessorin?
Neuroprosessori (NPU – Neural Processing Unit) on yleisnimitys, jolla viitataan tekoälylaskennassa käytettäviin IP-piireihin, ja siinä tarkoituksessa myös DRP-AI on NPU.
Mitä uusia tekniikoita DRP-AI3 käyttää RZ/V2H:ssa?
DRP-AI3:ssa on otettu käyttöön nopeita ja vähän tehoa kuluttavia menetelmiä, jotka tukevat tekoälymallien koka pienentäviä menetelmiä. Erityisesti seuraavia kevennettyjä menetelmiä tuetaan:
1) Kvantisointi: Vähennetään bittimäärien painoja neuroverkkojen painotiedoksi ja ilmoitetaan tulo- ja lähtödata (piirrekartta) jokaiselle kerrokselle. Muunnetaan DRP-AI:lle tyypilliset 16-bittiset liukuluvut 8-bittisiksi kokonaisluvuiksi (INT8).
2) Haarojen karsiminen: Tässä tekniikassa jätetään laskutoimituksia pois asettamalla haarojen painotieto siten, että sillä ei ole vaikutusta tunnistamisen tarkkuuteen.
Onko RZ/V2H:lle saatavissa mallikytkentöjä tai referenssisuunnitteluja?
Renesas on kehittänyt visuaaliseen tunnistukseen tarkoitetun laitteen (Visual Detection Single Board Computer), jossa kameran ottamien kuvien perusteella arvioidaan laitteen ympärillä olevia kohteita ja määritetään ja ohjataan sen liikkeitä reaaliaikaisesti. Tässä ratkaisussa on yhdistetty tehonhallintapiireillä varustettu RZ/V2H ja ohjelmoitavat VersaClock-logiikkageneraattorit siten, että ne tukevat tehokkaita teollisuuden robotti- ja koneistotoimintoja. Ratkaisun suunnittelu on tehty siten, ettei lisätuuletusta tarvita ja että materiaalin tarve ja laitteen koko pysyvät minimaalisina.
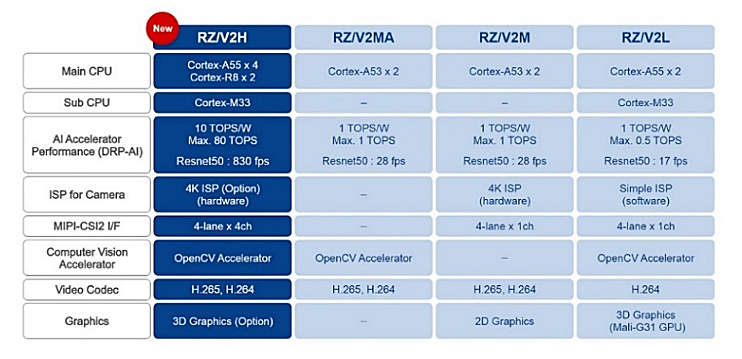
Mitä kaikkea RZ/V-sarjan valikoimaan kuuluu?
RZ/V-sarjan mikroprosessoriyksiköissä on kiihdyttimenä DRP-AI. Alla olevassa taulukossa luetellaan valikoimaan kuuluvia saman arkkitehtuurin tuotteita, jotka ovat skaalattavissa 0,5 TOPS:sta 80 TOPS:iin.
 Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.
Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.


















