






GPS-paikannus riittää mainiosta, mikäl tarkoitus on tietää esimerkiksi etäisyys määränpäähän. Joissakin sovelluksissa olisi käyttöä selvästi tarkemmalle paikannukselle. Amerikkalaistutkijat ovat kehittäneet menetelmän, joka tarkentaa GPS-paikannuksen muutamaan senttiin.
GPS-paikannuksessa sijainti lasketaan sen perusteella, kuinka kauan radiosignaaleilta kuluu aikaa vastaanottimeen päätymiseen. Sijaintitietoon tarvitaan neljän satelliitin signaali ja näin päästään noin 10 metrin tarkkuuteen.
Differentiaalisessa paikannuksessa päästään maa-asemia hyväksikäyttämällä noin metrin tarkkuuteen. Tämä ei kuitenkaan riitä esimerkiksi robottiautojen edellyttämään tarkkuuteen. Kalifornian yliopiston Riversiden yksikössä tutkimusryhmää vetäneen Jay Farrellin mukaan robottiauton täytyy tietää paitsi se, millä kaistalla se liikkuu myöskin se, missä kohtaa kaistaa auto on.
Tämä sijaintitieto tarvitaan lisäksi reaaliajassa ja nopealla kaistanleveydellä koko matkan ajan. Tämä onnistuu, kun GPS-mittausdata yhdistetääm liikeanturin tuottamaan informaatioon. Liikeanturi tuottaa täsmällisen sijaintitiedon, joka päivittyy nopeasti – siis käytännössä jatkuvasti.
Aiemmin tämänkaltainen tarkka paikannus on vaatinut raskasta laskentaa. Farrellin tiimi kehitti algoritmeja, jotka tuottavat täsmällisen sijaintitiedon selvästi vähemmällä laskennalla.
Tämän ansiosta laskentaa voidaan tehdä suhteellisen matalatehoisilla prosessoreilla. Tämän ansiosta senttimetrintason paikannus on mahdollisuus tuoda älypuhelimiin ja muihin henkilökohtaisiin laitteisiin ilman, että niiden hinta nousee.
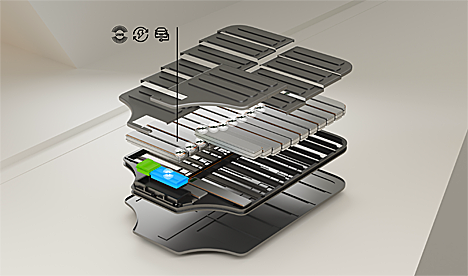
 Keraamiset monikerroskondensaattorit joutuvat tosi koville autojen elektroniikkajärjestelmissä. Vaurioiden ehkäisemiseksi niissä on aiemmin käytetty hopeaepoksiin perustuvia pehmeitä päätyliitoksia, mutta ongelmana on silloin ollut hopean vaeltaminen. SEMCOn eli Samsung Electro-Mechanicsin kehittämä kupariepoksiin perustuva ratkaisu eliminoi sekä halkeamien/oikosulkujen syntymisen että metallin kulkeutumisen.
Keraamiset monikerroskondensaattorit joutuvat tosi koville autojen elektroniikkajärjestelmissä. Vaurioiden ehkäisemiseksi niissä on aiemmin käytetty hopeaepoksiin perustuvia pehmeitä päätyliitoksia, mutta ongelmana on silloin ollut hopean vaeltaminen. SEMCOn eli Samsung Electro-Mechanicsin kehittämä kupariepoksiin perustuva ratkaisu eliminoi sekä halkeamien/oikosulkujen syntymisen että metallin kulkeutumisen.
 Englantilainen Pickering Interfaces esitteli Electronica-messuilla uuden sukupolven yksipaikkaisen sulautetun PXIe-ohjaimensa mallimerkinnältään 43-920-002. Uutuus on markkinoiden kompaktein ja tehokkain 3U-ohjain PXI Express -alustalle.
Englantilainen Pickering Interfaces esitteli Electronica-messuilla uuden sukupolven yksipaikkaisen sulautetun PXIe-ohjaimensa mallimerkinnältään 43-920-002. Uutuus on markkinoiden kompaktein ja tehokkain 3U-ohjain PXI Express -alustalle. Barcelonalainen ignion esitteli Electronica-messuilla uutta OMNIA mXTEND -komponenttiaan, joka yhdistää kolme antennia yhteen innovatiiviseen ratkaisuun. Virtuaaliseksi antenniksi kutsuttu moduuli muuttaa piirikortin kolmen eri radion säteileväksi antenniksi.
Barcelonalainen ignion esitteli Electronica-messuilla uutta OMNIA mXTEND -komponenttiaan, joka yhdistää kolme antennia yhteen innovatiiviseen ratkaisuun. Virtuaaliseksi antenniksi kutsuttu moduuli muuttaa piirikortin kolmen eri radion säteileväksi antenniksi.
 ETNdigi 2/2024 -lehti käsittelee laajasti elektroniikka-alan innovaatioita, erityisesti sulautettuja järjestelmiä ja kehittyvää tekoälyä. Lehdessä esitellään esimerkiksi LUMI-supertietokoneen roolia tekoälymallien kehittämisessä Suomessa. Uutiskattauksen lisäksi mukana on useita syvemmälle eri tekniikoihin sukeltavia artikkeleita.
ETNdigi 2/2024 -lehti käsittelee laajasti elektroniikka-alan innovaatioita, erityisesti sulautettuja järjestelmiä ja kehittyvää tekoälyä. Lehdessä esitellään esimerkiksi LUMI-supertietokoneen roolia tekoälymallien kehittämisessä Suomessa. Uutiskattauksen lisäksi mukana on useita syvemmälle eri tekniikoihin sukeltavia artikkeleita. NordPass on julkaissut kuudetta kertaa vuotuisen 200 yleisintä salasanaa -tutkimuksensa, joka paljastaa kansainvälisesti suositut salasanat sekä 44 eri maan salasanat. Maailmalla yleisin salasana on nerokas ”123456” ja Suomen yleisimpänä jatkaa kestosuosikki ”qwerty123”.
NordPass on julkaissut kuudetta kertaa vuotuisen 200 yleisintä salasanaa -tutkimuksensa, joka paljastaa kansainvälisesti suositut salasanat sekä 44 eri maan salasanat. Maailmalla yleisin salasana on nerokas ”123456” ja Suomen yleisimpänä jatkaa kestosuosikki ”qwerty123”.