








Ohjelmistopohjaiset ajoneuvot lisäävät elektroniikan ja dataliikenteen määrää nopeasti. Turvallinen ja luotettava toiminta edellyttää entistä tarkempaa synkronointia, kun ajoneuvoihin integroidaan yhä enemmän kameroita, tutkia, lidareita ja keskitettyjä laskentayksiköitä.
Tarkka ajoitus on keskeinen tekijä erityisesti ADAS- ja V2X-järjestelmissä, joissa millisekunnit voivat ratkaista esimerkiksi hätäjarrutuksen onnistumisen. Pienikin ajoitusvirhe heikentää sensorifuusion tarkkuutta ja voi viivästyttää järjestelmän reagointia.
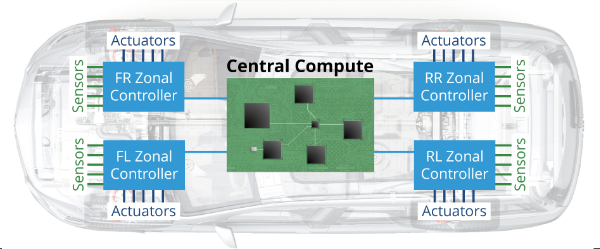
Perinteiset kvartsikidepohjaiset oskillaattorit eivät enää vastaa ohjelmistopohjaisten ajoneuvojen vaatimuksiin. Lämpötila-alueet, jatkuva tärinä ja sähkömagneettinen häiriö kuormittavat ajoitusjärjestelmiä, erityisesti sähköautoissa ja keskitettyihin compute-arkkitehtuureihin siirryttäessä.
MEMS-pohjaiset piiajoitusratkaisut tarjoavat tähän vaihtoehdon. Ne kestävät tärinää ja iskuja moninkertaisesti kvartsiratkaisuihin verrattuna, säilyttävät alle ppm-tason vakauden koko autoteollisuuden lämpötila-alueella ja mahdollistavat ajoituksen jatkuvan valvonnan yhden piirin sisällä.
Kun ajoneuvot kehittyvät kohti yhä autonomisempaa toimintaa, ajoitus ei ole enää taustatekniikka. Siitä on tullut turvallisuuden ja suorituskyvyn perusta. MEMS-pohjainen ajoitus nousee keskeiseen rooliin tulevaisuuden ohjelmistovetoisissa ajoneuvoissa.









 Ohjelmistopohjaiset ajoneuvot avaavat valtavan määrän uusia mahdollisuuksia. Sovelluksia ja toimintoja syntyy jatkuvasti lisää, ja niiden avulla ajokokemuksesta pyritään tekemään entistä turvallisempi, miellyttävämpi ja paremmin verkottunut. Jos ADAS ja V2X ovat muotitermejä, tarkka ajoitus on perusta.
Ohjelmistopohjaiset ajoneuvot avaavat valtavan määrän uusia mahdollisuuksia. Sovelluksia ja toimintoja syntyy jatkuvasti lisää, ja niiden avulla ajokokemuksesta pyritään tekemään entistä turvallisempi, miellyttävämpi ja paremmin verkottunut. Jos ADAS ja V2X ovat muotitermejä, tarkka ajoitus on perusta.