









Turva- ja valvontajärjestelmät ovat yhä tärkeämpi osa jokapäiväistä elämäämme. Meitä valokuvataan, videoidaan ja monitoroidaan lähes kaiken aikaa. Tämän päivän kameralaitteistot käyttävät yhä korkeamman tason prosessointia ja jopa keinoälyratkaisuja automatisoidakseen datankeruun ja sen perusteella tehtävän päätöksenteon. Hymyile, sinuun suunnattu kamera ei ole enää niin piilossa!
Artikkelin on kirjoittanut  Mouser Electronicsin John Gabay. Valmistuttuaan hän on työskennellyt puolustus- kulutus-, teollisuus- kulutus-, energia- ja lääketieteen elektroniikan yrityksissä suunnittelijana, ohjelmistonkehittäjänä, järjestelmäsuunnittelijana ja keksijänä. Automaatiotekniikan parissa John on työskennellyt vuoteen 2004 asti perustamassaan Dedicated Devices Corporationissa. Tämä jälkeen hän on työskennellyt tutkimuksen parissa ja kirjoittanut artikkeleita useista eri aiheista. Mouser Electronicsin John Gabay. Valmistuttuaan hän on työskennellyt puolustus- kulutus-, teollisuus- kulutus-, energia- ja lääketieteen elektroniikan yrityksissä suunnittelijana, ohjelmistonkehittäjänä, järjestelmäsuunnittelijana ja keksijänä. Automaatiotekniikan parissa John on työskennellyt vuoteen 2004 asti perustamassaan Dedicated Devices Corporationissa. Tämä jälkeen hän on työskennellyt tutkimuksen parissa ja kirjoittanut artikkeleita useista eri aiheista. |
Videovalvonta on osoittautunut monella tapaa hyödylliseksi edistyneeksi anturiksi. Se palvelee etäsilminä, mahdollistaen virtuaalisen läsnäolon kaukaisissakin kohteissa. Videokamerat kattavat näkymäänsä jatkuvasti, antaen kameran peilata ja peittää haluttu valvontakuvio.
Videojärjestelmät voivat myös toimia siellä, missä ihminen ei voi. Ensimmäisiä videovalvontajärjestelmiä käytettiin monitoroimaan V-2-rakettien kehitystä ja laukaisua vuonna 1942. Turvallisen matkan päästä tutkijat ja insinöörit pystyivät seuraamaan niiden toimintaa ja tunnistamaan virhetoimintoja.
Tämän jälkeen videojärjestelmiä on käytetty silmiemme ja korviemme laajennuksena. Tekniikan jatkuva kehitys ja edistyminen valmistuksessa on vienyt videovalvonnan tasolle, jolla voimme hyvin mielin luottaa siihen turvallisuuskäytössä.
Ensiksi valo
Valoherkän materiaalin resistanssi tai johtavuus voi muuttua sen mukaan, onko valoa vai ei. Aikaiset harmaasävyvideojärjestelmät kuten RCA Vidicon -kamerajärjestelmä 1950-luvulla perustuivat elektroniputkiin, joissa oli valoherkkä seleniumlevyä. Tämä toimi aistittavan kuvan tarkentajana.
Elektronisäde skannaa levyä ja virtalukema oli suoraan verrannollinen siihen määrään valoa, joka kyseiseen osaan levyä osui juuri sillä hetkellä. Näin rasteriskannattu putki tuotti alkeellisen elektronisen videosignaalin, joka voitiin helpottiin lähettää pitkien etäisyyksien päähän. CRT-televisio vastaanotti tämän signaalin käänteisessä järjestyksessä skannaten fosforinäyttöä elektronisäteellä niin, että kuvaan luotiin vastaavat valotasot.
Vuosikymmenien ajan video oli rajoittunut harmaasävyyn ja kuvien näyttämiseen reaaliajassa. Jokaisen anturin edessä olevat värisuotimet rajoittivat analogiatason värikomponenttien intensiteettiin värianturien luomisessa. Väripurskekiteiden keksiminen auttoi synkronoimaan videosignaalin värikomponentit.
Tasainen tekninen kehitys paransi putkia ajan myötä. Resoluutio parani, tehonkulutus pieneni, valmistuskustannukset alenivat ja niiden luotettavuus parani. CCTV-videojärjestelmät (Closed Circuit Television) ja yleisradiotoiminta syntyivät ja nopeuttivat kehityksen vauhtia.
Heikkopuolena nämä tekniikat käyttivät heikkoa lasia ja tarvittavat piirit korkeita jännitteitä. Kokorajoitukset tekivät putkipohjaisista kuva-antuereista suuria ja kömpelöitä. Modernin puolijohdetekniikan ansiosta tämä ei enää ole ongelma.
Puolijohdekennot
Valoherkät CCD-kennot (Charge-Coupled Device) tulivat markkinoille 1970-luvun alkupuolella. Niissä yhdistettiin puolijohdevalmistustekniikkaa tarkasti määritellyillä matriiseilla, jotka oli kehitetty muistipiirejä varten. Yksittäiset valoa aistivat pikselit eli kuvaelementit matriisissa asettivat synkronisesti kiikkupiirin eli flip-flopin tilan. Nämä anturit kytkettiin toisiinsa ketjuttamalla kuten vaihtorekisteri. Tämän rekisterin kellottaminen tuottaa synkronisen videostriimin.
Alunperin yksiulotteisiksi skannerien ja faksein anturimatriiseiksi tarkoitetut ja lopulta väriversioiksi kehittyneet CCD-kennot tulivat ja mahdollistivat videoprosessorin koon dramaattisen pienentämisen samalla, kun niiden tehovaatimukset yksinkertaistuivat.
Ihmisen ei tarvitse tarkkailla
Tallennustekniikoiden puuttumisen takia alkuaikojen CCTV-järjestelmät edellyttivät ihmissilmän tarkkailua, joten jostakin tapahtumasta piti kerralla saada irti mahdollisimman paljon informaatiota. Sen jälkeen kuva oli iäisesti menetetty.
Tällaisissa CCTV-järjestelmissä ihminen tunnisti kuviot, havaitsi mielenkiintoiset aktiviteetit ja teki päätöksen hälytyksen antamisesta. Itse asiassa ihminen oli ohjausprosessori hälytyssilmukassa tekemässä päätöstä laukaista hälytys tai ei.
Lineaariset CCD-kennot alkoivat muuttaa tätä kuviota, kun niiden mukana tuli ohjelmoitu kyky lukea viivakoodeja ja tunnistaa hahmoja/kuvioita. Kaksiulotteiset anturit, joita käytetään moderneissa puhelimissa, kameroissa ja konenäköjärjestelmissä on parempi resoluutio ja spektriherkkyys, vaikka niiden koko ja tehontarve on pienempi, eivätkä ne vaadi samanlaista ulkoista linssikokoonpanoa.
Konenäköön ollaan liittämässä keinoälyä, jolla päästään uuden sukupolven valvontajärjestelmiin. Ne tarvitsevat vähemmän käyttöhenkilöstöä, ovat edullisempia ja tunnistavat suuremman joukon kohteita. Nämä vaatimukset nostavat suunnittelijoiden riman aiempaa korkeammalle: nyt heidän täytyy integroida toimintoja korkeammalla tasolla ja suuremmalla suorituskyvyllä kuin koskaan aiemmin.
Suunnittelukysymykset ja -huolet
Ilman modernien muistipiirien nopeuksia ja tiheyksiä, ja ilman modernien sulautettujen prosessorien suorituskykyä seuraavan polven älyk käitä valvontajärjestelmiä ei voisi suunnitella järkevän hintaisiksi tai kokoisiksi. Yksi syy on se lisärasitus, mitä jokainen kuvan resoluution parantaminen aiheuttaa koko muun järjestelmän suunnitteluun.
Vanhemmat 8-bittiset neljän megahertsin prosessorit riittivät hyvin, kun suunnittelijat kehittivät ensimmäisiä digitaalisia ohjaussilmmukoita. Samoin riittivät signaaliprosessoinnin ja reaaliaikaohjauksen digitaaliset tekniikat, mutta ne eivät yksinkertaisesti ole riittävän nopeita vastaamaan älykkään turvatekniikan vaatimuksiin. Tämä perustuu ennen kaikkea muistivaatimusten eksponentiaaliseen kasvuun.
Esimerkiksi yksinkertaisessa komposiittivideokamerassa oli yhteensä 525 skannauslinjaa, joita voitiin näytteistää erilaisilla nopeuksilla. 21 näistä linjoista käytettiin pystysuorien linjojen synkronointiin. Modernit CCD-kuvakennot lähtevät liikkelle ¼-VGA:sta (320 x 240) halvemmassa päässä.
¼-VGA-resoluutiolla tarvitaan 76 800 tavua esittämään yksi ainoa kuvaruutu eli kehys 8 bitin resoluutiolla. 8-bittisessä RGB:ssä (yksi tavua punaista, vihreää ja sinistä varten) tämä kasvaa 230 400 tavuun. Molemmissa tapauksissa muistitarve on vanhoja legacy-prosessorien kykyjä suurempi.
Muistivaatimukset kasvavat dramaattisesti kun resoluutio kasvaa. Jopa 640 x 480 pikselin VGA-resoluutiolla yksi harmaasävyruutu tarvitsee 307 200 tavua ja väri tarkoittaa jo lähes yhden megatavun verran dataa ruutu kohti 24-bittisessä väripaletissa.
Eikä tarve tähän pysähdy. 30 ruudun sekuntinopeudella tarvitaan lähes 28 megatavua puskuroimaan yksi ainoa sekunti VGA-videota. Muutamien yleisimpien videostandardiresoluutioiden vertailu osoittaa, miten nopeasti vaatimukset kasvavat.
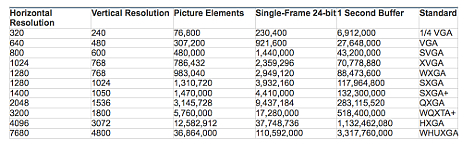
Kasvava resoluutio vaatii dramaattisesti lisää muistia videon prosessoinnissa, tallennuksessa ja siirtämisessä.
Huippunopeat prosessorit
Videotekniikoiden rinnalle on kehittynyt useita edistyneitä prosessoriperheitä ja -arkkitehtuureita, ja ne alkavat olla valmiita vastaamaan seuraavan sukupolven älykkäästä videovalvonnasta. Kaikissa tapauksissa käytetään ulkoisia väyläliitäntöjä ja todennäköisimmin nopeita ulkoisia DRAM-muisteja. Edistyneimmät prosessorit voivat käsitellä useita gigatavuja osoitettua muistia ja tukea useita synkronisia nopeita muistiväyliä kuten DDR ja SDR. Suunnittelijoiden pitää pitää mielessään muistien kaistanleveydet järjestelmiä suunnitellessaan.
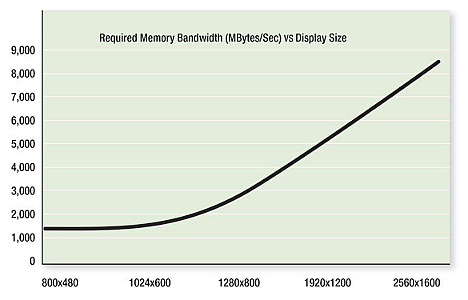
Kuva 1. Resoluution kasvaessa siirtonopeus ja datanlukuaika nousevat yhä tärkeämpääm asemaan. Tämä edellyttää nopeampia prosessoreja ja muistialijärjestelmiä, joilla kuva siepataan ja puskuroidaan ennen kuin se voidaan lähettää keskusyksikköön tai kiihdyttimelle.
Kahdessa keskeisessä sovelluksessa erilaiset vaatimukset ohjaavat prosessorin valintaa. Keskusyksikön tai hubin ja/tai keräimen suunnittelu vaatii erittäin tehokkaan ja jopa moniydinprosessorin käyttöä, DVR-toiminnallisuutta ja suuria määriä sekä haihtumatonta että haihtuvaa muistia. Varsinaisten kameoriden sisällä ovat voimassa erilaiset rajoitukset: matala tehonkulutus, laajempi käyttölämpötila-alue ja pienempi koko.
Yhden kellojakson käskyjä prosessoiva 48 megahertsin 32-bittiseen ARM-Cortex-M0-ytimeen pohjaavan STMicroelectronicsin STM32F051K4U6TR -piirin dataväylän ja liitännän leveys riittävät suoritutumaan koko kuvan elementtien näytteistämisestä yhdellä siirrolla. Piiri toimii jopa 1,8 voltin alhaisella jännitteellä -40 - +85 asteen alueella 5x5 millin kotelossa.
Tällä prosessorilla on rautatason DMA-liitäntä (direct memory access), joka voi suoritutua viidellä kanavalla muistista-muistiin- ja muistista-oheislaitteeseen -siirrosta. Mukaan rakennettu HDMI-ohjain operoi alhaisemmilla nopeuksilla ja minimaalisella muistinkäytöllä. Erityinen kelloalue (domain) ei riipu prosessorin pääkellotaajuudesta.
Kun prosessorin on liitetty moderniin nopeaan ja tiheään muistiin, kuten ISSI:n DDR3-väyläinen IS43TR16256AL-15HBLI, piiri tuottaa neljän gigabitin (256 Mb x 16 bittiä) 1333 megahertsin muistiväyläratkaisun. Pitää muistaa, ettei muistiin pitää prosessorin lisäksi päästä käsiksi myös tietoliikenneohjain, joka on keskeinen osa koko yhtälöä.
Siirto ja ketjutus
Tietoliikennevaatimukset voivat olla keskeinen osa seuraavan sukupolven valvontajärjestelmien suunnitteluhaasteita. Kun dataa syntyy niin paljon, siirtonopeuksien pitää kasvaa eksponentiaalisesti, kuten muistivaatimuksetkin kasvoivat. Myös siirtomatkasta tulee huomioon otettava kysymys. Jopa suositulla sadan megabitin ethernet-linkillä on rajoituksensa, kun sitä ajetaan pitkiä matkoja CAT-tyyppisen kaapeloinnin yli.
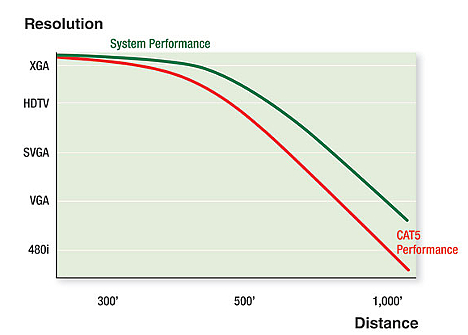
Kuva 2. Myös alhaisemmilla videotarkkuuksilla datansiirron nopeus voi heikentyä nopeasti etäisyyden kasvaessa, kun käytetään edullisia välineitä kuten CAT-tyyppistä parikaapelia.
Tämä tarkoittaa myös sitä, etteivät lyhyen kantaman datalinkit kuten DVI ja HDMI ole käyttökelpoisia näillä etäisyyksillä. Sama pitää paikkansa monien uusien multimedialiitäntöjen, kuten S/PDIF:n ja Toslinkin kohdalla. Vaikka S/PDIF on digitaalinen liitäntä ja linkkiä voidaan pidentää standardeilla ajureilla ja vastaanotinpiireillä, vaaditut datan kaistanleveydet ovat vain kasvamassa, mikä käytännössä vaatii jatkossa kysykkäämiä ja kalliimpia ajuriratkaisuja.
Gigapikselitason kamerat ovat jo tulleet tarjolle. NMOnet ovat huolissaan yhteiskunnan tietoturva- ja yksityisyyskysymyksistä, mutta he voivat varautua siihen, että hedän tekemisiään valvotaan jatkuvasti yhä suuremmilla tarkkuuksilla. Siinä missä kuituyhteys tukee suurepia datanopeuksia, kupari on aina ollut edullisempi yhteys toteuttaa. Tämän takia kuparipohjainen yhteystekniikka kehittyy ja etenee kohti uusia standardeja etävalvontajärjestelmien tarpeita varten.
Yksi mielenkiintoinen, nouseva tekniikka joka on vastaa,assa kaistanleveyden tarpeeseen, on CoaXPress-standardi. Kyse on koaksiaalikaapelissa toimivasta, 6,25 gigabittiä sekunnissa siirtävästä pisteestä-pisteeseen -linkistä, joka yltää jopa 130 metrin päähän. Useita kanavia yhdistämällä datanopeudessa päästään jopa 25 gigabittiin sekunnissa.
Piirisarjoja kuten Microchipin EQCO62X20-piirejä (EQCO62R20.3 on vastaanotinpiiri, EQCO62T20.3 lähetin) voidaan käyttää muodostamaan kaksisuuntainenn full duplex -tietoliikennelinkki yhden koaksiaalikaapelin yli. Ulkisia induktoreita käyttämällä samassa kaapelissa voidaan siirtää myös sähkövirtaa. Alhainen tehonkulutus (alle 70 milliwattia 1,2 voltin jännittellä) tulee houkuttamaan monia, samoin piirien pieni 4-millinen QFN-kotelointi.
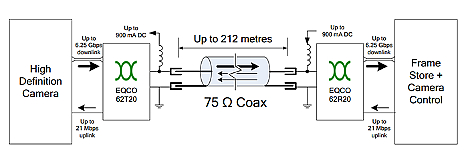
Kuva 3. Microchipin EQCO62X20-piirisarja tukee CoaXPress v1.0 -kamerastandardia.
Entäpä langattomasti?
Vaikka langaton linkki olisi mahdollinen, kantama ja kaistanleveysrajoitukset tekevät sen käytännössä käyttökelvottomaksi useimpien valvontasovellusten kannalta. Lisäksi langattomia linkkejä on helpompi häiritä, mikä altistaisi valvontasovellukset erilaisilla hyökäyksille.
On mahdollista käyttää lyhyitä langattomia linkkejä paikallisiin keskuksiin tai hubeihin. Tämä on erityisen kiinnostavaa, mikäli järjestelmä halutaan liittää pilveen. Ei ole täysin mahdoton ajatus sekään, että jo lähitulevaisuudessa kaikki julkisten tilojen valvontakamerat liitetään osaksi esineiden internetiä. Tämä tarkoittaisi, että kaikilla olisi pääsy kaikkiin julkisiin valvontalaitteisiin, mikä voisi osaltaan tehokkaasti ehkäistä esimerkiksi väkivallan käyttöä. Huomaamatta sellaiseen ei voisi syyllistyä.

 Suuren nopeuden Ethernet-muuntajien tulee täyttää nykyaikaisille, tehokkaille verkkolaitteille asetetut vaatimukset. Niiden tehtävänä on turvata luotettava ja varma datansiirto, optimoida signaalin laatu ja tehostaa verkon yleistä suorituskykyä ja kapasiteetin hyödyntämistä.
Suuren nopeuden Ethernet-muuntajien tulee täyttää nykyaikaisille, tehokkaille verkkolaitteille asetetut vaatimukset. Niiden tehtävänä on turvata luotettava ja varma datansiirto, optimoida signaalin laatu ja tehostaa verkon yleistä suorituskykyä ja kapasiteetin hyödyntämistä.