










 Jo perustason automalleissa on nykyisin tusinan verran elektronisia ohjainyksikköjä, jotka tuottavat satoja jollei tuhansia signaaleja, jotka on reititettävä eri puolille ajoneuvoa. Tämä asettaa isoja vaatimuksia auton sisäiselle verkolle.
Jo perustason automalleissa on nykyisin tusinan verran elektronisia ohjainyksikköjä, jotka tuottavat satoja jollei tuhansia signaaleja, jotka on reititettävä eri puolille ajoneuvoa. Tämä asettaa isoja vaatimuksia auton sisäiselle verkolle.
|
Kirjoittaja Joseph Notaro vastaa ON Semiconductorilla |
 autoteollisuuden tuotteiden strategiasta ja liiketoiminnan kehityksestä. Hänellä on yli 25 vuoden kokemus puolijohdealalta. Aiemmin hän on työskennellyt Fairchildilla ja STMicroelectronicsilla.
autoteollisuuden tuotteiden strategiasta ja liiketoiminnan kehityksestä. Hänellä on yli 25 vuoden kokemus puolijohdealalta. Aiemmin hän on työskennellyt Fairchildilla ja STMicroelectronicsilla.Ajoneuvojen ominaisuudet ovat jatkuvan kehityksen alaisena ja, jos palataan vaikkapa 20 vuoden taakse, voidaan todeta, että kehitys on ollut mullistavaa. Tuolloin ajoneuvot olivat vielä etupäässä mekaanisia laitteita, joissa oli jarrutusta varten joitakin hydraulisia alijärjestelmiä ja joissa elektronisesti toimivia olivat lähinnä yksinkertaiset valaisin-, sytytys- ja akunlatauspiirit. Oli käytännöllistä vetää johdinsarjat suoraan harvassa olevien eri elektroniikkapiirien välille ja vaikka tuloksena olikin johdinnippuja siellä täällä, tilanne oli kuitenkin hallittavissa tuohon aikaan.
Kun ensimmäiset ajoneuvojen sisäiset kaiutinjärjestelmät esiteltiin, johdotuksen asettamat vaatimukset olivat vielä suhteellisen yksinkertaisia käsittäen liitännät tehonsiirtoa, kaiuttimia ja antennia varten. Vuosituhannen vaihteen tienoilla elektroniikan määrä ajoneuvoissa alkoi merkittävästi kasvaa, kun ajoneuvojen pyöriin tulivat anturit renkaiden pitoa ja lukkiutumatonta jarrutusta ohjaamaan sekä runkoon törmäysanturit ilmatyynyjen laukaisua ohjaamaan. Seurauksena oli uudenlainen lähestymistapa, joka perustui hajautettuihin tai satelliittiavusteisiin elektronisiin ohjausyksiköihin.
Teknologian jatkuva kehittyminen on johtanut siihen, että luotettavista elektronisista järjestelmistä on muodostunut perusta nykyajan ajoneuvojen turvallisuudelle, tehokkuudelle ja mukavuudelle. Monien kuljettajaa avustavien toimintojen tarkoituksena on ajoneuvon kontrollin ylläpitäminen tehostamalla ohjausta, jarrutusta, pitoa ja moottorin toimintaa. Monet toiminnot kuten ajonvakausjärjestelmä (ESP, Electronic Stability Control), sähköinen ohjaustehostin (EPS, Electric Power Steering), aktiivinen jousitus ja lukkiutumaton jarrutus (ABS, Anti-lock Braking System) kuuluvat tähän kategoriaan. Vähemmän kriittiset järjestelmät ajoneuvoissa, kuten valaistus, tuulilasin pyyhkijät, ovien lukitus, ikkunat, kattoikkunat ja yhä lisääntyvät informaatio- ja viihdejärjestelmät on myös toteutettu elektronisesti ohjattavina järjestelminä, joissa jokaisessa on oma ohjausyksikkönsä valmiina kommunikoimaan muiden eri puolilla ajoneuvoa olevien järjestelmien kanssa.
Viime aikoina ajoneuvoissa ovat yleistyneet ajoavustimet (ADAS, Advanced Driver Assistance System) myös ihan perusmalleissa. Nämä pitkälle kehittyneet järjestelmät perustuvat suureen määrään erikoistuneita antureita, joiden tarkoituksena on kerätä tietoja kuljettajan avustamiseksi turvallisuuteen ja mukavuuteen liittyvissä ominaisuuksissa.
Esimerkiksi ajoavustimiin suunnitellut kamerat tarjoavat lisäominaisuuksia, kuten 360 asteen näkymän pysäköinnin avustuksessa. Paremmin varustelluissa autoissa saattaa nykyisin olla tusinan verran kameroita. Mitä riippuvaisempia ajoavustinjärjestelmät ovat kameroista tuottaessaan turvallisuuteen liittyviä toimintoja, sitä enemmän resoluutiota kameroilta edellytetään, jotta saadaan käyttöön yhä vain kasvava määrä dataa, joka on myös kyettävä siirtämään luotettavasti ja turvallisesti ilman viiveitä eri puolille ajoneuvoa.
On selvää, että ajoneuvojen teknologian kehityskulku ei olisi ollut mahdollista, jos autonvalmistajat olisivat pysytelleet perinteisessä johtimien kaapeloinnissa. Autonvalmistajat luottavat nyt kuitenkin menetelmiin, jotka perustuvat kanavointiin ja verkkoyhteyksiin, jolloin järjestelmien välinen liitettävyys paranee samalla kun fyysisten liitosten määrän tarve vähenee.
Ajoneuvojen sisäisten verkkojen protokollat
Jo perustason automalleissa on nykyisin tusinan verran elektronisia ohjainyksikköjä, jotka tuottavat satoja jollei tuhansia signaaleja, jotka on reititettävä eri puolille ajoneuvoa. Johdinsarjat liittimineen, joilla saataisiin reititettyä modernin ajoneuvon vaatimat kaikki teho- ja datasignaalit, muodostaisivat liian suuren, raskaan, monimutkaisen ja kalliin kokonaisuuden ollakseen käytännöllinen ratkaisu. Lisäksi jokainen johdinpari pitäisi räätälöidä autosarjan kutakin mallia varten erikseen. Ajoneuvon sisäinen verkko (IVN, In-Vehicle Networking) ratkaisee nämä ongelmat, mutta se asettaa myös suunnitteluun omat reunaehtonsa.
Elektronisten ohjainyksikköjen ja niihin liittyvien järjestelmien vaatimukset eroavat laajasti laitetyypistä ja sen toiminnoista riippuen. Sellaiset parametrit kuten nopeus ja kaistanleveys, sallittava värinä (jitter) ja vasteaika (latenssi) ja redundanssi vaihtelevat arvoltaan paljon ja niillä on vaikutuksensa liitettävyysvaatimuksiin ja jossain määrin käytettävään verkkoprotokollaan. Esimerkiksi osan ajoavustinta muodostava eteenpäin suunnattu kamera lähettää jatkuvana virtana suuria määriä erittäin kriittistä dataa, kun taas polttoaineen määrä ilmaiseva anturi lähettää yksittäisen datapaketin suhteellisen epäsäännöllisesti.
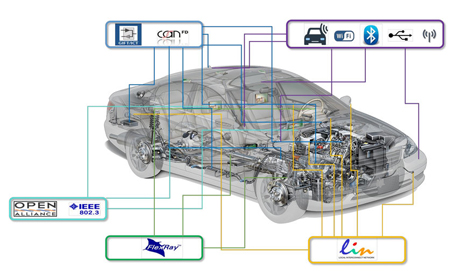
Ajan oloon on kehitetty joukko erilaisia ajoneuvojen verkkoratkaisuja, joilla on pyritty vastaamaan ajoneuvojen lisääntyviin datansiirtovaatimuksiin.
- LIN-väylä (Local Interconnect Network): Tarjoaa suhteellisen pienen kaistanleveyden ja enimmillään 20 kb/s:n nopeuden, joten soveltuu käytettäväksi ensi sijassa edullisissa ja yksinkertaisissa alajärjestelmissä.
- CAN-väylä (Controller area Network): Tästä Robert Bosch GmbH:n 1980-luvulla kehittämästä standardista tuli ISO-standardi vuonna 1994 ja se on eniten käytössä oleva ajoneuvoverkko, jota yleistyy vuosittain satojenmiljoonien solmujen käyttöönotolla. Sen nopeus on enimmillään 1 Mb/s ja sillä yhdistetään erilaisia antureita elektronisiin ohjausyksiköihin. CAN-väylässä on kanavointiominaisuudet mahdollistaen anturien jakamisen yhden tai useamman elektronisen ohjausyksikön kesken. CAN käyttää yhden kerran kierretyn parin kuparijohtimia ja johtimien tarve vähenee jopa 40 prosenttiin perinteisiin johdotuksiin verrattuna.
- FlexRay-tiedonsiirtoväylä: Kun CAN-väylän nopeus ei enää riittänyt, kehitettiin FlexRay-protolla tarjotenenimmillään 10 Mb/s:n nopeutta, jota tarvitaan esimerkiksi sähköisen kaasupolkimen (drive-by-wire) ja ohjauspyörän (steer-by-wire) sovelluksissa. FlexRay-protokolla on sovitettavissa useille verkkotopologioille.
- MOST-tiedonsiirto (Media Oriented Systems Transport): Tämä yksityinen standardi on kehitetty siirtämään audio-, video-, ääni-, puhe- ja datasignaaleja enimmillään 150 Mb/s:n nopeudella.
Mainittuja protokollia kehitetään kaiken aikaa, jotta ne vastaisivat uusien ajoneuvojen asettamia haasteita. Esimerkiksi Robert Bosch GmbH esitteli uuden version CAN-väylästä International CAN Conference -tapahtumassa vuonna 2012. Nimellä CAN FD tunnetussa versiossa CAN-väylän perusominaisuuksiin on yhdistetty suuremmat datanopeudet ja datan hyötykuormat.
IVN-verkon sisäinen segmentointi
Vaatimukset verkon latenssille käskyn antamisesta sen suorittamiseen ja vasteen saamiselle vaihtelevat paljon ajoneuvon eri alijärjestelmissä. Tällä on suuri vaikutus käytettävän IVN-protokollan valintaan. Esimerkiksi sähköisen ohjauksen signaalin prioriteetti on suurempi kuin radiokanavan vaihtoa ohjaavan signaalin ja verkon pitää olla konfiguroitu sen mukaisesti.
Ajoneuvo voidaan jaotella useisiin kohdealueisiin, jotka on ryhmitelty eri ominaisuuksien, toimintojen ja vaatimusten mukaan. Turvallisuus-, päästö- ja lakisääteisten syiden takia kahdella yleisimmällä kohdealueella– voimansiirtolaitteet (moottorin ohjaus ja tehon siirto) ja runko (jousituksen, ajosuunnan ja jarrutuksen ohjaus) – on tyypillisesti erittäin kovat tosiaikaisen vasteen vaatimukset. Moottorinohjaukseen vaikuttaa saasteiden jahiukkasten muodostumista hillitsevien säännösten toteuttaminen sekä parhaimman mahdollisen energiatehokkuuden ylläpitämisen takaaminen. Tämän tasoiset ohjaustoiminnot vaativat antureilta hyvin nopeaa (millisekuntien luokkaa olevaa) näytönottonopeutta ja suhteellisen tehokkaita mikro-ohjaimia sekä nopeaa tiedonvaihtoa ajoneuvon eri kohdealueiden välillä.
Runko on kohdealueena kriittinen turvallisuusasioissa, joita ovat ajoneuvon vakaustoiminnot, ABS-jarrut ja enenevässä määrin sähköinen ohjaus. Datan suhteet vaatimukset ovat samaa luokkaa voimalaitteiden kanssa, vaikkakin turvallisuusnäkökohdat synnyttävät haasteita, joihin voidaan parhaiten vastata käyttämällä aikaliipaistuja tai deterministisiä verkkoteknologioita. Kori taas on kohdealue, jossa on suuri joukko erilaisia toimintoja, kuten valaistuksen, ikkunoiden, ovien, ilmastoinnin, tuulilasin puhdistuksen ohjaus. Nämä toiminnot yleensä vaativat suhteellisen pienten informaatiopakettien siirtoja ja ovat ensi sijassa vasteita ajoneuvon kuljettajan ja matkustajien antamiin komentoihin.
Telematiikka/tietoviihde on merkittävästi kasvava kohdealue ajoneuvon tiedonsiirrossa pitäen sisällään navigointijärjestelmät, kaiutinpuhelimet, audiojärjestelmät ja etädiagnostiikan. Tämä kohdealue ei niinkään vaadi aikakriittistä viestintää, mutta monimediaa sisältävät datavirrat edellyttävät suurta signaalin integriteettiä ja tarkkoja datan yksityisyyden turvaamistoimia. Kun ajoneuvot ovat yhä enemmän yhdistettynä toisiinsa ja niitä ympäröivään maailmaan, langaton tiedonvälitys ja siihen liittyvät turvallisuuskysymykset nousevat tärkeään rooliin.
Siinä missä voimansiirtolaitteet, runko, kori ja telematiikka ovat ajoneuvon neljä ensi sijaista kohdealuetta, turvallisuuteen liittyvät toiminnot, kuten törmäysanturit, ilmatyynyt, kaistavahdit, adaptiivinen vakionopeudensäädin (ACC, Adaptive Cruise Control) ja kuljettajan kuntoa valvovat järjestelmät ovat luomassa uuden kohdealueen, johon yleisesti viitataan sanaliitolla ’aktiivinen ja passiivinen turvallisuus’, määrittelyä.
IVN-verkkojen tulevaisuuden näkymät
Nopeus, jolla ajoneuvojen toimintoja kehitetään ja otetaan käyttöön, aiheuttaa haasteita monien nykyisten verkkoprotokollien suorituskyvylle. Autovalmistajat ovat ryhtyneet kartoittamaan yhdessä elektroniikkateollisuuden edustajien kanssa protokollia, jotka täyttäisivät autoelektroniikan nykyiset ja tulevat suorituskykyvaatimukset.
Kun ajoneuvojen toimintojen määrä kasvaa jatkuvasti ja tiedonvälitys muiden ajoneuvojen ja ympäröivän infrastruktuurin, kuten älykaupunkien, välillä tulee yhä yleisemmäksi, on ajoneuvon arkkitehtuuri muutosten äärellä. On todennäköistä, että ethernetistä on tulossa hallitseva IVN-teknologia, jolloin edessä on siirtyminen signaalipohjaisesta tiedonsiirrosta kohti palvelukeskeisiä arkkitehtuureja.
Ethernetiä pidetään usein todennäköisenä valintana tulevaksi IVN-verkoksi, sillä se mahdollistaisi kaikkien ajoneuvon toimintojen yhdistämisen yhden verkkostandardin ympärille. Ethernetillä on monia etuja, kuten sen laaja levinneisyys ja helppokäyttöisyys, komponenttien suuri tarjonta ja sitä kautta verkon koko voidaan valita mahdollisimman taloudellisesti. Saatavissa olevat kaistanleveydet ovat gigabittien luokkaa ja kehityksen alla on 10 Gb/s:n kaistanleveys.
Ethernetin haasteena IVN-ratkaisuissa on latenssi, mikä heikentää sen soveltuvuutta turvallisuudeltaan kriittisiin sovelluksiin. Kuitenkin uudet edistysaskeleet kuten 10BASE-T1S, joka on 10 Mb/s:n törmäyksettömän (collision free) datan standardin mukainen yksittäisen kierretyn parin yli siirrettävä ratkaisu, jossa on sisäänrakennettu sovitettu pääsy solmuihin, ovat raivaamassa ethernetin tietä tulevaisuuden IVN-teknologiaksi.
 Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.
Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.


















