










 Monien unelma olisi ajaa paikasta A paikkaan B ilman minkäänlaista ponnistelua, vähän Ritari Ässän K.I.T.T.-auton tyyliin. Nykyaikaiset autot lähestyvät yhä enemmän näitä tulevaisuuden visioita, ja erilaisilla anturitekniikoilla on tässä tärkeä rooli. Yksi lupaavimmista näistä on lidar.
Monien unelma olisi ajaa paikasta A paikkaan B ilman minkäänlaista ponnistelua, vähän Ritari Ässän K.I.T.T.-auton tyyliin. Nykyaikaiset autot lähestyvät yhä enemmän näitä tulevaisuuden visioita, ja erilaisilla anturitekniikoilla on tässä tärkeä rooli. Yksi lupaavimmista näistä on lidar.
|
Artikkelin kirjoittaja Alain Bruno Kamwa työskentelee optotuotteiden myynnin päällikkönä Rutronikilla. |
Tutkan tavoin lidar eli valotutka on menetelmä havaitsemiseen ja etäisyyden mittaamiseen (DAR). Molemmat käyttävät samaa kaikuluotausmenetelmää kuin lepakot. Ne lähettävät ultraääniaaltoja ja havaitsevat esineiden tai saaliiden sijainnin sen mukaan, miten aallot palautuvat. Tutka käyttää radioaaltoja, mutta lidar käyttää valoaaltoja.
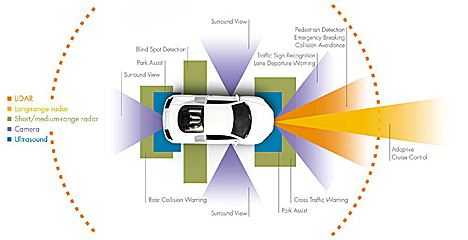
Kuva 1. Lidar on tärkeä osa ajoavustimia ja tulevaisuuden robottiautoja. Kuva: Laser Components
Lidar-anturit käyttävät laserdiodia, joka lähettää valopulssin. Jos este heijastaa sitä, anturi havaitsee sen. Lennon aika (ToF, time-of-flight), joka on valoaaltojen lähettämisen ja vastaanottamisen välinen aika, mahdollistaa anturin ja esteen välisen etäisyyden laskemisen.
Erittäin herkkiä detektoreita
Valoaallot hajoavat moniin suuntiin riippuen heijastavan kohteen tai elävän olennon etäisyydestä ja muodosta. Siksi mitä laajempi ilmaisinalue, sitä tarkempi kuva sen tuottamasta ympäristöstä on, koska se voi havaita vielä enemmän heijastuksia. Nykyiset lidar-anturit käyttävät APD- eli avalanche-valodiodiryhmiä (avalanche photodiode), joissa on 8, 12 tai 16 diodia. Jokainen diodi edustaa pikseliä kuvassa. Tämä tarkoittaa, että matriisin koon lisäksi diodien välinen etäisyys (= pikseleinä) on myös tekijä anturin tarkkuudessa. APD-herkkyydellä on myös merkitystä. Ihannetapauksessa niiden tulisi havaita mahdollisimman vähän heijastuneen säteen jälkiä.
Ihanteellinen valonsäde
Valopulssien pituus on kriittinen rooli anturin erottelussa, minkä vuoksi lidar-valmistajat pyrkivät kehittämään mahdollisimman lyhyitä pulssipituuksia. Tällä hetkellä ne mittaavat keskimäärin 5 nanosekunnin, ja enintään 10 nanosekunnin pulsseja. Toinen tekijä on valonsäteen koko. Koska laserdiodi lähettää erittäin tarkennetun valonsäteen, se voi mitata vain samankokoisen pisteen etäisyyden. Tämä ei ole läheskään riittävä käytettäväksi kuljettajan apujärjestelmissä (ADAS) eikä varmasti autonomisissa ajoneuvoissa. Näkökentän laajentamiseen on olemassa useita ratkaisuja. Haasteena on havaita pienimmätkin pinnat suuressa näkökentässä.
Silmän ja ihon turvallisuus
Yksi rajoittava tekijä lidar-kehityksessä on silmien turvallisuus. Ottaen huomioon, että lasersäteet voivat osua silmän verkkokalvoihin, varsinkin kun niitä käytetään tieliikenteessä, on tärkeää varmistaa, että ne eivät aiheuta silmävaurioita. Lasersäteet voivat osua myös ihmiseen ihoon.
Standardi EN 60825-1 määrittelee eri luokat niiden silmiin ja ihoon kohdistuvan riskin perusteella - sekä aallonpituudella että pulssin pituudella on merkitystä tässä. Esimerkiksi luokka 1 koskee lasersäteilyä, joka ei ole vaarallista tai jota käytetään suljetussa kotelossa. Luokka 2 koskee lasersäteilyä näkyvällä spektrialueella 400-700 nanometriä. Lyhyellä valotusajalla (enintään 0,25 sekuntia) se ei aiheuta vaaraa silmille. Luokan 4 laserit ovat erittäin vaarallisia silmille ja iholle, vaikka säteet olisivat erittäin hajallaan.
Salama-lidar – hajotettua valoa
Yksi menetelmä näkökentän laajentamiseksi perustuu valonsäteen sirontaan siten, että se peittää suuren alueen laajalla sädekulmalla. Myös nimellä ”salama-lidar” tunnettu valo on tässä tapauksessa hajautettu ja paljon heikompi kuin kohdennettu valonsäde. Silti pitkän kantaman ja korkean resoluution saavuttamiseksi käytetään laserdiodeja, joiden teho on erittäin suuri, jopa 1-2 kW.
Sovelluksissa, joissa esineitä on löydettävä vain lyhyiltä etäisyyksiltä, ovat ihanteellisimpia VCSEL-laserit (vertical-cavity surface-emitting laser diodes), joiden aallonpituus on 850 - 940 nanometriä. Niitä voidaan käyttää tehokkaiden 2D-ryhmien kehittämiseen. Ilmaisimille voivat olla hyödyllisiä erittäin herkät anturit, jotka pystyvät havaitsemaan jopa yksittäiset fotonit.
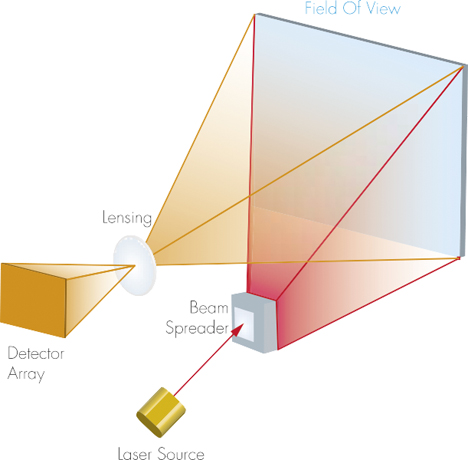
Kuva 2. Salama-lidar: Lasersäteen sironta laajentaa näkökenttää. Joukko erittäin herkkiä antureita voi havaita yksittäisiä fotoneja. Kuva: Laser Components
Saksalainen Fraunhofer-instituutti on kehittänyt CMOS-pohjaiset SPAD-ilmaisimet mikroelektronisiin piireihin ja järjestelmiin, jotta kantama kasvaa ja jotka toimivat voimakkaassa auringonvalossa. SPAD-diodit (single-photon avalanche diode) on integroitu CMOS-prosessiin, joka on sertifioitu autoteollisuudelle ja optimoitu optoelektronisiin sovelluksiin. Tämä tuottaa erittäin herkkiä ja erittäin nopeita avalanche-valodiodeja, joiden hetkellinen vahvistus on jopa 108, korkea pulssi ja matala kohinataso.
Laser Components on kehittänyt salama-tyyppisesti toimivan lidaranturin CMOS-pohjaisilla SPAD-diodeilla. Esimerkiksi SPAD2L192 on 192 × 2 pikselin CMOS-kenno salamalidar-sovelluksiin. Se mittaa etäisyydet ensimmäisen fotonin ja suoran lentoajan (ToF) periaatteen perusteella. Yhden fotonin ilmaisimet ovat erittäin herkkiä aja ajallisesti tarkkoja. Pikselin sisäinen aika-digitaalimuunnin, jonka ajallinen resoluutio on 312,5 ps ja asteikon loppuarvo 1,28 μs, mahdollistaa 192 metrin nimellismittausalueen ja tarkkuuden 4,7 senttimetrin etäisyydellä.
Skannaava lidar – liikkuvat peilit
Valon voimakkuuden säilyttämiseksi ja laajemman näkökentän saavuttamiseksi lidar-skannaus sananmukaisesti skannaa näkökenttää valonsäteellä. Käyttämällä liikkuvia mikropeilejä valo ohjataan skannattavan alueen yli. Skannaavat lidar-anturit käyttävät yleensä 1-16 laserdiodia. 905 nanometrin reunasta emittoivat laserit tuottavat parhaat tulokset, kun taas suuritehoisilla yli 100 watin laserdiodeilla saavutetaan jopa 150 metrin kantama.
Koska vain muutama suhteellisen pienitehoinen diodi riittää, skannaavat lidar-anturit tarjoavat hyvät lämpöominaisuudet. Tämä mahdollistaa erittäin korkeat pulssitaajuudet ja mahdollistaa silmien turvallisuuden takaamisen jopa 905 nanometrin aallonpituudella.
Näkökenttä on normaalisti 145 ° y-akselilla ja 3,2 ° z-akselilla. Teoriassa tällä tekniikalla voitaisiin tehdä 360 °:n panoraamaskannaus, mutta käytännössä skannaukseen yleensä jää "sokeita pisteitä/kulmia". Valonsäde ei pysty skannaamaan aivan lähintä maastoa, mutta mutta lisätutka- ja kameraratkaisut tarjoavat tavan kiertää nämä puutteet. Skannaavat lidar-anturit eivät kuitenkaan kokoonsa ja huonon kestävyytensä vuoksi sovi käytettäviksi ajoneuvoissa. Ne ovat kooltaan noin 10,5 x 6 x 10 senttimetriä, joten ne ovat liian suuria käytettäväksi esimerkiksi ajovalon umpiossa. Liikkuvat peilit eivät myöskään kestä tärinää, iskuja, pölyä ja äärimmäisiä lämpötiloja, joita ei voida välttää ajoneuvoissa.
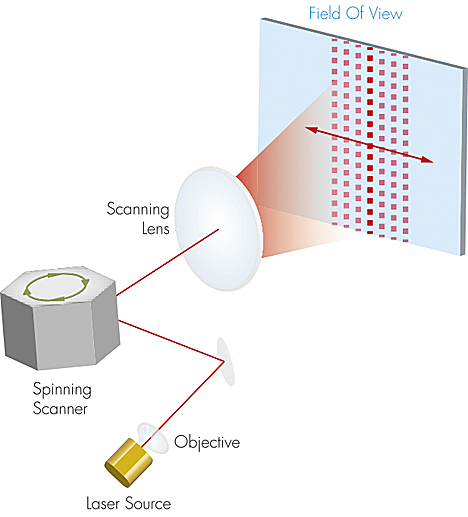
Kuva 3. Skannaava lidar: Pulssilasereita (pulssimaisia laserdiodeja tai VCSEL-lasereita) käytetään skannaamaan näkökenttä pyörivällä peilillä. Kuva: Laser Components
Sopivia diodeja on saatavana Laser Componentsilta. Esimerkiksi 905DxxUA-sarja sisältää pulssilaserdiodeja, joissa on yksi- ja moniliitosrakenne, jopa 110 watin laserteho ja aallonpituus 905 nm. Komponentit ovat ehdottoman luotettavia, tarjoavat erinomaisen lämpöstabiilisuuden ja erittäin tarkan sirun kohdistuksen hermeettisesti suljetussa kotelossa. Tämä tekee niistä sopivia etäisyyden mittaamiseen ja esteiden havaitsemiseen, mittauslaitteisiin, lasertutkiin ja moniin lääketieteellisiin sovelluksiin. AEC-Q101-kvalifioituja malleja voidaan käyttää myös autoteollisuudessa.
Piipohjaiset APD-diodit (avalanche photo diode) tai APD-diodiryhmät ovat suositeltavia ilmaisimille. Laser Componentsin SAHA-sarjan APD-diodit on optimoitu 850-905 nanometrin aallonpituuksille. Puolijohdemateriaali on tässä erityisen tehokasta, ja pulssilaserdiodit emittoivat myös näillä aallonpituuksilla. Pienikokoisessa pintoliitoskotelossa APD-diodit tarjoavat korkean kvanttitehokkuuden ja siten korkean herkkyyden ja alhaisen kohinan. SAH1Lxx-sarjasarja, jossa on 8, 12 tai 16 erittäin herkkää diodia suojakalvolla varustetussa LCC44-pakkauksessa, tarjoaa samat ominaisuudet. Niissä on erityisen pienet 40 mikrometrin diodivälit. 12 APD-diodin ryhmä on saatavana myös 14-nastaisessa DIL-kotelossa. Standardikokojen lisäksi saatavilla on myös räätälöityjä ryhmiä, joissa on tietyt APD-diodimäärät ja -koot.
Puolijohdelidar – puolijohteita mekaanisten komponenttien sijaan
Puolijohdelidar-anturit ovat pienempi, vankempi vaihtoehto. Niissä valonsädettä ohjataan puolijohteella mekaanisten komponenttien sijaan. Näistä on kaksi versiota: toisessa käytetään MEMS-pohjaisia peilejä, toisessa OPAa eli optisia vaiheistettuja ryhmiä.
MEMS-pohjaisilla peileillä varustetut lidarit käyttävät mikropeilien matriisia, joissa jokaisen peilin reunan pituus on vain muutama mikrometri. Ne siirtyvät edestakaisin kahden asennon välillä useita tuhansia kertoja sekunnissa sähköstaattisten kenttien liikuttamana. Tällaisia lidareja käytetään sovelluksissa kuten poistumisteiden skannerit tai DLP-projektorit (digitaalinen valonkäsittely), joten kyseessä on todistettu, testattu tekniikka, jolla on suhteellisen alhaiset tuotantokustannukset.
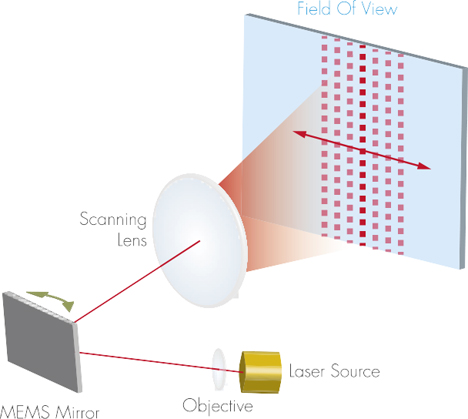
Kuva 4. Puolijohdelidar: Liikkuvat MEMS-peilit heijastavat valoa eri suuntiin suurentaakseen näkökenttää. Kuva: Laser Components
Autoteollisuuden sovelluksissa antureiden on kuitenkin täytettävä paljon tiukemmat vaatimukset. Ne vaativat esimerkiksi laajemman näkökentän verrattuna kassajärjestelmiin tai projektoreihin. Jos skannaustaajuus on yli 100 hertsiä, nykyiset ratkaisut tarjoavat 40 ° kulman. Laajempia kulmia sisältäviä MEMS-järjestelmiä kehitetään parhaillaan.
OPA-pohjaisissa lidareissa laajemman pulssikantaman tuova modulaattori muuntaa kunkin laserdiodin lähettämän valon vaihetta. Tekniikka on edelleen tutkimusvaiheessa. Tämän variantissa käytetään piipohjaista piiriä, jonka mitat ovat vain muutamia neliömillimetrejä. Se korvaa pyörivän emitterin ja ilmaisinyksikön. Suurempia lähtöjä ja laajempaa näkökenttää varten testit ovat käynnissä käyttäen aallonpituuksia, jotka ulottuvat pidemmälle infrapuna-alueelle kuin tällä hetkellä tavallisesti käytetty 905 nm. Esimerkiksi 1550 nm:n aallonpituus ei ole haitallista silmille, mutta lumi tai sade voi vaikuttaa haitallisesti siihen. Tässä tarvitaan myös muita ilmaisimia.
Scifistä tulee todellisuutta
Olemme vielä muutaman vuoden päässä autonomisista ajoneuvoista siten, kun se on tieteiskirjallisuudessa esitetty. Jokainen apujärjestelmä - olipa se sitten mukautuva vakionopeudensäädin (ACC), hätäjarruavustin (EBA) tai kaistavaroitin (LDW) - on askel kohti tavoitteen saavuttamista. Monille näistä lidar on tärkeä komponentti, joka on ehdottomasti yhdistettävä muihin tekniikoihin, kuten ultraääniantureihin, kameroihin ja tutkaratkaisuihin, koska jokaisella näistä tekniikoista on omat vahvuutensa ja heikkoutensa.
 Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.
Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.


















