











Tiellä pysyminen, pysäköinti, ajaminen ruuhkissa. Uusimmat ADAS-tekniikat (Advanced Driver Assistance Systems) pystyvät jo kaikkeen tähän. Tulevat järjestelmät suorittavat kasvavan joukon tehtäviä kuljettajan puolesta. Monia haasteita pitää kuitenkin ratkaista ennen kuin robottiautosta tulee todellisuutta.
Artikkelin kirjoittaja Tamara  Drexler työskentelee Rutronikilla autoelektroniikan liiketoimintayksikön tuotepäällikkönä. Drexler työskentelee Rutronikilla autoelektroniikan liiketoimintayksikön tuotepäällikkönä. |
Autonomisissa ajojärjestelmissä saksalainen autoteollisuus on paalupaikalla, ainakin tuoreen Kölnin taloudellisen tutkimuskeskuksen (IW) tutkimuksen mukaan. Tutkimus paljasti myös, että Saksan autoteollisuudelle on myönnetty yli puolet kaikista alan patenteista vuoden 2010 jälkeen. Esimerkiksi uudet BMW 7 -sarjan autot osaavat pysäköidä autotalliin itsekseen ja seuraavan sukupolven Porsche Panamera ja Audi 8 varustetaan autonomisella ruuhkapilotilla, joka ajaa ajoneuvoa pysähtelevässä (start-stop) liikenteessä ilman mitään kuljettajan toimia.
Sitä vastoin vain noin seitsemän prosenttia alan patenteista tulee Googlelta, Applelta, Teslalta ja muilta vastaavilta yrityksiltä. Google on ainoa autoalan ulkopuolelta tuleva yritys, joka sijoittuu kymmenen innovatiivisimman yrityksen joukkoon.
Tästä huolimatta saksalaisten autonvalmistajien ei kannata ottaa yhteistä jalkaansa kaasupolkimelta. IW:n mukaan amerikkalaisyritykset kiihdyttävät kilpailua ja ovat jo vahvassa asemassa digitaalipiireissä, verkkotekniikoissa ja big dataa hyödyntävissä liiketoimintamalleissa.
ADAS-komponentit
Anturit, tutka- ja LiDAR-piirit sekä kamerat ovat ADAS-toteutusten avainroolissa. Paineanturit monitoroivat renkaiden tilaa, kirkkausanturit ohjaavat ajovaloja ja renkaiden nopeutta mittaavat anturit mahdollistavat ABS-jarrut. Ultraäänianturit mittaavat etäisyyttä edellä ajavaan autoon ja tämän perusteella voidaan määrittää auton nopeus niin, että se seuraa muuta liikennettä. Liikennemerkkejä tunnistavat kamerat varmistavat, ettei auto ylitä sallittua nopeutta.
Anturidata prosessoidaan kunkin ohjausyksikön mikro-ohjaimella. Vastaavat signaalit lähetetään sitten akturaattoreihin, ,kuten moottoreihin ja venttiileihin, myös valaistuina ja kuultavina signaaleina.
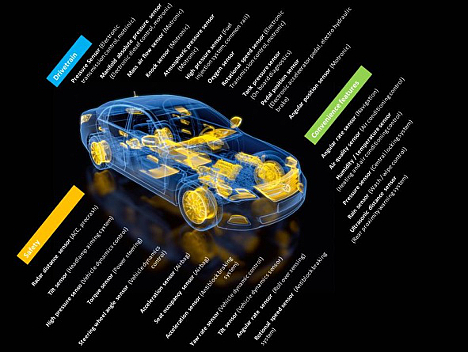
Kuva 1. Lukuisat anturit muodostavat perustan laajalle valikoimalle avustinjärjestelmiä ja lopulta robottiauton perustan (kuva: Rutronik).
Esimerkiksi kaistamerkintöjen ylittämisestä varoittava järjestelmä koostuu ympäristöä kuvaavasta kamerajärjestelmästä. Laskentayksikön ohjelmisto prosessoi kuvadataa ja määrittelee kaistan merkintöineen. Rinnan tämän kanssa kulmatunnistin mittaa ohjauskulmaa, mistä myös lähetetään tieto laskentayksikköön. Mikäli tämä data näyttää, että ajoneuvo on poistumassa kaistalta, keskusyksikkö lähettää signaalin moottorille, joka täristää rattia niin että kuljettajalla on hyvin aikaa reagoida. Joissakin autoissa on jopa sähköinen servomoottori, joka oikaisee ratin asennon.
Avustamisesta autonomiaan
Kuten kaistanvaroitusjärjestelmä ovat nykyiset ADAS-järjestelmät osittain automonisia. Vastuu säilyy aina kuljettajalla. Monet kehitysaskeleet ovat selvästi keskittyneet täyteen automaatioon. SAE-järjestön (Society of Automotive Engineers) luokituksen mukaan tämä siirtymä tapahtuu viiden tason kautta.
Tasoilla 0-2 kuljettaja monitoroi vielä ympäristöä. Tasosta 3 lähtien automatisoidut järjestelmät ottavat haltuunsa tämän monitoroinnin. Tasolla 4 automaatio on viety jo hyvin pitkälle ja 5-tasolla kyse on täysin automatisoidusta robottiautosta. 5-taso eroaa 4-tasosta siten, että siinä kaikki ajotilat ovat jatkuvasti autonomisesti suoritettuja. Nykyautot ovat vielä tasoilla 1 (kuljettajan avustimet) tai tasolla 2 (osittainen automaatio). Jokainen uusi taso tuo lisää vaatimuksia elektronisiin ohjausyksikköihin.
Tähän asti erilaisia avustinjärjestelmiä on pitkälti toteutettu erillisinä ratkaisuina. Ne on yhdistetty toisiinsa vain osittain ja yleensä ne määritellään toisistaan erillisenä. Täysin automatisoitu ajaminen tarkoittaa kuitenkin, että eri järjestelmät pitää verkottaa ja kaikista antureista tuleva raakadata pitää prosessoida keskitetysti.
Tämänlainen keskittäminen on loogista useista syistä. Prosessoivalla ECU-yksiköllä on automaattinen pääsy kaikkeen dataan, minkä ansiosta tätä dataa voidaan hyödyntää laajassa valikoimassa toimintoja. Koska anturimoduulit vain keräävät dataa ja siirtävät sitä ilman prosessointia tai päätöksentekoa, datahäviöt anturimoduulissa eliminoituvat. Samalla anturimoduulit voivat olla pienempiä, halvempia ja vähemmän tehoa kuluttavia, minkä ansiosta ajoneuvoon voidaan asentaa enemmän antureita.
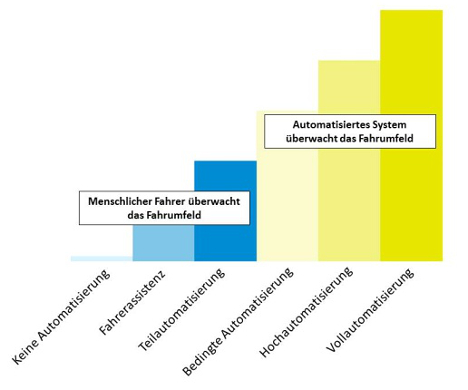
Kuva 2. ADAS-järjestelmien kehitys täysin automatisoiduiksi ajoneuvoiksi tapahtuu SAE-järjestön (Society of Automotive Engineers) viiden vaiheen kautta (kuva SAE).
Tässä tapauksessa kaiken datan siirtämiseen vaadittu kaistanleveystarve kasvaa merkittävästi, kun kamerajärjestelmät, tutkat ja laserskannerit tuottavat tarkkoja mittauksia ajoneuvon ympäristöstä. Myös turvallisuuden kannalta kriittisen datan määrä kasvaa. Nykyisiä ECU-yksiköitä ei ole vielä suunniteltu käsittelemään niin valtavia määriä dataa. Tämän takia niiden laskentatehoa ja -nopeutta täytyy merkittävästi parantaa.
Verkkoon liitetty auto
Yksi ajoneuvon järjestelmistä on sen verkottaminen. Tietoliikenne autosta autoon ja autosta verkkoinfraan on autonomisen ajamisen kasvavan taloudellisuuden kantava voima, kun liikennevirtoja hallitaan älykkäästi. Samaan aikaan verkottuminen tuo mukanaan merkittävästi suuremmat turvallisuus- ja tietoturvariskit. Järjestelmän vaatimaa internetyhteyttä voidaan käyttää ajoneuvon ohjelmistojen ja laitteiden peukaloimiseen, jolloin sen hallinta voi onnistua ulkopuolelta tai jopa etänä.
Turvallisuus ja tietoturva
Robottiautojen hyväksynnän avain piilee niiden turvallisuuden takaamisessa. Tämä tarkoittaa datan tietoturvaa, hyökkäyksiltä suojautumista ja arkaluontoisen datan, kuten liikkumisprofiilien suojaamista ja ajoneuvoon tallennetun datan laadun varmistamista. Tähän lisätään vielä auton toiminnallinen turvallisuus sekä tarve suojautua yksittäisten järjestelmien virheitä tai pettämisiä vastaan.
Mitä enemmän valtaa kuljettaja antaa elektronisille järjestelmille, sitä suuremmat vaatimukset niille asetetaan. Esimerkiksi Audin julkistama ruuhkapilotti antaa kuljettajalle kymmenen sekuntia aikaa reagoida ennen kuin se ottaa auton hallintaan hätätilanteessa. Toisin sanoen järjestelmän ei pidä sammua virhetilanteessa, vaan sen täytyy pitää yllä tarvittavia toimintoja jotta vaarallisen tilanteet vältetään tai ratkaistaan.
Yhteistyötä kaikilla tasoilla
Tämän takia yhteistoiminnasta on tulossa yhä tärkeämpää, sekä elektronisten komponenttien, alijärjestelmien ja järjestelmien välillä, että ajoneuvon ja internetin välillä – ja lopulta autonvalmistajien, toimittajien, ohjelmistokehittäjien ja elektroniikkayritysten välillä. Jakelijoilla on tässä avainrooli, mihin Rutronik panostaa vahvasti sekä konsulttina että toimijana. Rutronikin Automotive Business Unit -liiketoimintayksikkö tarjoaa räätälöityä tukea asiakkaille, niin että nämä löytävät erityisvaatimuksiin räätälöidyt komponentit valituilta toimittajilta. He voivat myös saada globaalia teknistä tukea ja kaupallista tukea tiiviissä yhteistyössä toimittajien kanssa. Tällä tavoin Rutronikin autoelektroniikkayksikkö tukee asiakkaitaan tasapuolisesti näiden tuodessa innovatiivisia arkkitehtuureitaan nopeasti tien päälle.
ADAS-järjestelmien täytyy toteuttaa kolme avaintehtävää:- Lisätä turvallisuutta: kaistavaroitin tai hätäjarrutusavustin tekevät perustehtäviä itsenäisesti vaaratilanteissa, mikä parantaa uljettajan ja muiden tieläliikkujien turvallisuutta. - Lisätä ajomukavuutta: Pysäköintiavutimen, ruuhka-autopilottien tai etäisyystutkien avlla kuljettaja voi luovuttaa jotkin toiminnot järjestelmälle ja matkustaa rentoutuneemmin ja mukavammin. - Lisätä taloudellisuutta: Dynaamiset ruuhkapäivitykset auttavat lyhentämään matka-aikoja ja alentamaan polttoaineen kulutusta sekä CO2-päästöjä. |
 Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.
Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.


















