











Yleisin puettava laite on älykello tai fitnessranneke. Niiden arkkitehtuuriin kuuluu toiminnallisia lohkoja, kuten ympäristön ja biometrinen aistiminen, langaton yhteys ja mikro-ohjain. Tämä on johtanut uuden standardin tehokomponentin, microPMIC-piirin kehittämiseen, joka tuottaa anturien, radioiden ja prosessorin vaatimat erilaiset tehosyötöt. Se säästää aikaa, tilaa ja kustannuksia.
| Artikkelin ovat kirjoittaneet ams:n Mark Shepherd, Thomas Kail ja Stephan Kreszl. Shepherd on ams:n sovellussuunnittelija, joka on keskittynyt tehonhallintaan. Hänellä on yli 20 vuoden kokemus elektroniikka-alalta ja elektroniikkainsinöörin tutkinto San Franciscon yliopistosta. Ams:llä hän on työskennellyt vuodesta 2011 lähtien. Thomas Kail on ams:n tehonhallintapiirien tuotepäällikkö. Hän työskentelee ams:n pääkonttorissa Grazin lähellä Itävallassa. Kail tuli ams:lle sovellusinsinööriksi vuonna 2006. Stephan Kreszl tuli ams:n palvelukseen vuonna 2013 LDO-, DC-DC- ja mikroPMIC-piirien laitesuunnittelijaksi. |
Jo pidemmän aikaa tiheydeltään suurten tehojärjestelmien standardi on älypuhelimen asettama. Siinä vastakkaiset vaatimukset pitkästä toiminta-ajasta akulla ja komponenttien jatkuva minityriasointi tulivat huippuunsa. Sekä älypuhelimessa että tabletissa tehopiirin suunnittelussa tehokkain lähestymistapa on ollut integrointi: mahdollisimman monien järjestelmätason toiminnallisten lohkojen integrointi yhdelle ja samalle tehonhallintapiirille (PMIC, power management circuit).
Nyt on ehkä aika tunnustaa, että standardin määrittelevät puettavien laitteiden valmistajat. Niissä tehotiheyden vaatimukset ovat jopa suuremmat kuin älypuhelimissa tai tableteissa. Kuten älypuhelin, puettavat laitteet kuten älykello tai fitnessranneke ovat kannettavia tietokonelaitteita, joissa on useita antureita, radioita ja käyttäjäliitännän oheislaitteista prosessoriytimen ympärillä.
Mutta laiteformaatti on useita kertoja pienempi, ja akulla käytössä oleva tila on pelottavan pieni. Silti toiminta-aika akkuvirralla on käyttäjille tärkeä ominaisuus ja yleensä he ajattelevat, ettei puettavaa laitetta pitäisi joutua lataamaan sen useammin kuin älypuhelintakaan.
Puettavien laitteiden suunnittelijoilla on siten edessään äärimmäinen miniatyrisoinnin haaste. On siksi hieman paradoksaalista, että puettavien suunnittelijat ovat tähän asti kieltäneet integroinnin strategian, joka on palvellut älypuhelimien valmistajia niin hyvin. Tämä ei ole yllättävää, sillä "puettavien" laitekategoria on pitänyt sisällään laajan valikoiman erilaisia laitteita ja yhden erilaisia laitteita palvelevan PMIC-piirin määrittely on ollut hankalaa puettavien markkinoiden alkuvaiheissa.
Nyt on kuitenkin nousussa selviä trendejä ranteessa pidettävien laitteiden - älykellojen ja fitnessrannelleiden - arkkitehtuurissa. Ja tämä kehitys osaltaan johtaa uudenlaisten mikro-PMIC-piirien kehitykseen, jotka lupaavat tuoda ratkaisun puettavien laitteiden tehotiheysongelmaan.
Perinteisten tehonhallintapiirien kehitys
Kun tehopiirien suunnittelijat miettivät PMIC_piirejä, heillä on tyypillisesti silmissään kuva suurista, suuritehoisista laitteista, jotka on optimoitu jotakin tiettyä Qualcommiln, Intelin ja Nvidian kaltaisilta yrityksiltä tulevaa prosessoriperhettä varten. Nämä PMIC-piirit ovat ihanteellisia kumppaneita prosessoreilleen, sillä ne tuottavat juuri oikean yhdistelmän reguloituja lähtöjä pienessä kotelossa, joka tuottaa vaadittavat reitit/polut lämmön haihtumiseen niillä kuormilla, joita piirien odotetaan syöttävän. Joillakin vähemmän suosituilla prosessoreilla ei ehkä ole omaa PMIC-ratkaisua, mutta mikäli suunnittelija käyttää jonkun PMIC-piirien tukemaa sovellusprosessoria, tehonhallintapiiriä olisi järjetöntä olla käyttämättä.
Itse asiassa älypuhelin- ja tablettisektoreilla markkina on päätynyt käyttämään yhtä tai kahta hallitsevaa prosessoriperhettä ja tämä tuo PMIC-valmistajille riittävän suuret markkinat prosessorispesifisten laitteiden kehitystä varten.
Puettavien markkinoille prosessorien valikoima ei ole kutistunut läheskään samalla tavalla, joten tehopiirien valmistajilla ei ole ollut samaa etua standardista prosessorimääritelmästä, johon he voivat sovittaa uuden puettavien PMIC-piirin.
Pitäisikö OEM-laitteen suunnittelijan olettaa sitten löytävänsä standardin PMIC-piirin, joka vastaa hänen tarpeisiin täysin? Selvästikin laajalle puettavien laitteiden markkinoille tähdätty PMIC-piiri voi epäonnistua vastaamaan kaikkiin järjestelmän tarpeisiin ja siksi vaatia erillistehokomponenttien lisäämistä suunnitteluun, mikä kumoaa PMIC-piirin käyttämisen edut kokonaan. Tai sitten piiri sisältää käyttämättä jääviä toimintoja, mikä lisää PMIC-piirien tehonkulutusta, hintaa ja kokoa, eikä ylipäätään ole optimaalisin ratkaisu.
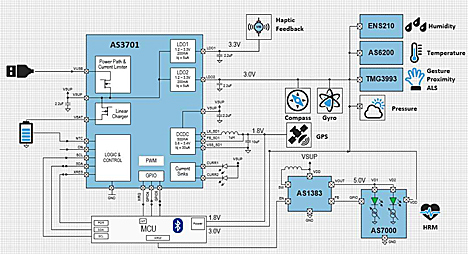
Kuva 1. Älykellon tyypillinen arkkitehtuuri. Osanumerot eri toiminnallisissa lohkoissa ovat ams:n valmistamien piirien numeroita.
Mikäli prosessorivaihtoehtojen moninaisuus sotii standardin PMIC-piirin käyttöä vastaan, ehkäpä tehovaatimusten standardointiin löytyy reitti jostain muualta?
Katsokaamme kuvaa 1, joka esittää älykellosuunnittelua. Mikro-ohjain voidaan valita laajasta valikoimasta ARM-ytimiä käyttäviä standardiprosessoreja. Järjestelmäkokonaisuuden perusarkkitehtuuri on kuitenkin yhteinen hyvin monille älykelloille, koska ne on kaikki tarkoitettu vastaamaan samoihin kuluttajien tarpeisiin - biometrinen ja ympäristön aistiminen, paikannus sekä käyttäjä- ja tietoliikenneliitännät.
Jos PMIC-valmistaja ottaa tämän yleisen arkkitehtuurin standardikseen, se voi kehittää puettavan laitteen tehojärjestelmäksi integroidun ratkaisun, joka lähes täysin tai suurimmalta osin sopii useimpien OEM-valmistajien tuotteisiin. Isäntäprosessori sekä Bluetooth- ja GPS-radiot voivat toimiva 1,8 voltin syötöstä, joka yleensä tarjotaan step-down -regulaattorilla.
Muut toiminnalliset lohkot vaativat 3 voltin syöttöjännitteen. Näitä ovat näyttö ja anturit kuten sykeanturi (joka on esitetty kuvassa 1 ams:n AS700-bioanturimoduulina). Lisäksi harjaton DC-moottori (BLDC), joka tuottaa haptisen palautteen, vaatii oman eristetyn syöttönsä vaadittujen tehopulssien takia.
Tämän tehojärjestelmän perinteinen ratkaisu vaatii usean erillisen tehopiirin käyttöä:
- akun latauspiiri
- regulaattori 1,8 voltin syötölle
- ajuripiiri haptiselle palautteelle tai LDO-regulaattorin BLDC-moottorille
- LDO näytölle ja mahdollisesti antureille, jotka vaativat 3 voltin syötön
Tämä ratkaisu on miniatyrioinnin vihollinen, sillä se vaatii suurta korttialaa itse piireille ja johtimille, joille ne liitetään osaksi muuta järjestelmää. Lisäksi pitää ottaa huomioon ne vaikeudet, joita komponenttien sijoittelu piirikortille aiheuttaa: EMI-säteily, useiden komponenttien aiheuttamat kokoonpanon kustannukset, sekä epäluotettavuus joka seuraa useiden erilliskomponenttien käytöstä.
MicroPMIC-piiri on sen sijaan helppo integroida suunnitteluun ja sen myötä sijoittelu on selvästi yksinkertaisempi. Esimerkkinä siitä, miten tämä voidaan tehdä, toimii ams:n valmistama puettavien laitteiden microPMIC-piiri AS3701. Tämä piiri on optimoitu kuvassa 1 kuvatulle järjestelmälle. Saadut tilansäästöt ovat merkittäviä: AS3701-piiri toimitetaan 4 neliömillin kokoisessa CSP-kotelossa, jossa liitinnystyjen väli on vain 0,4 milliä.
Tähän koteloon on istutettu täysin varusteltu lineaarinen akunlatauspiiri tehopolunhallinnalla, useita teholinjoja, suojaustoiminnot, käynnistysjaksoitusmahdollisuus ja I2C-liitäntä mikro-ohjaimelle. AS3701-piirin ala on suunniteltu tuomaan sekä tila- että kustannussäästöjä. Kuva 2 esittää kuvassa 1 kuvaillun puettavan laitteen piirikortin sijoittelua eli layoutia. AS3701-piirin kolme sisäistä liitosnystyä puuttuvat: tämä antaa tilaa helpoille läpivientiliitännöille.
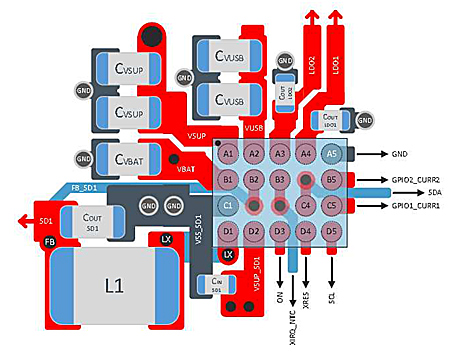
Kuva 2. AS3701-piirikaavio tyypillisessä älykellosuunnittelussa.
Kuinka hyvin näin pienikokoinen microPMIC-piiri pystyy vastaamaan älykellon monimutkaisiin tehovaatimuksiin? AS3701-piirin tapauksessa teholinjasyöttöihin kuuluvat kaksi 100 milliampeerin LDO-piiriä, 500 milliampeerin DC-DC-muunnin (step-down -tyyppinen) ja kaksi 40 milliampeerin ohjelmoitavaa GPIO-liitäntää (ks. kuva 3). Kuten kuva 1 näyttää, ainoa syöttö, jota AS3701-piiri ei tarjoa on 5 voltin tulo AS7000-piirin ledeille, joka toteutetaan erillisellä boost-muuntimella.
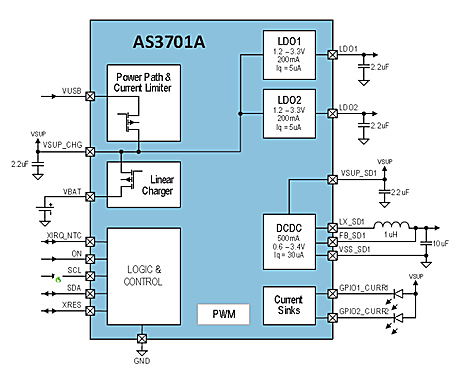
Kuva 3. MicroPMIC-piiri AS3701 sisältää useita teholohkoja ja akun latauspiirin.
Synkroninen step-down -muunnin sisältää tehonsäästötoimintoja: dynaamisen jännitteen skaalaamisen ja valittavissa olevat taajuudet 1-4 megahertsin välillä mahdollistavat sen, että hyötysuhde voidaan optimoida erilaisille kuormille. Kuva 4 osoittaa, että piirillä on mahdollista saavuttaa korkea hyötysuhde 1-300 milliampeerin kuormilla. Tämä on merkittävä saavutus, kun otetaan huomioon toiminnallisten lohkojen määrä piirien 2x2 millin kotelossa.
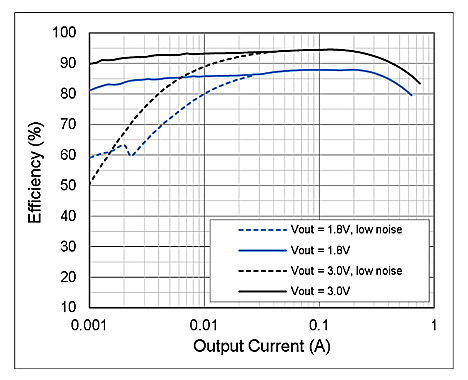
Kuva 4. AS7301-piirin 500 milliampeerin DC-DC-muuntimen hyötysuhdekäyrät.
Vaikka tehotiheys ja pitkä käyttöaika paristovirralla oat puettavan laitteen tehojärjestelmän tärkeimmät vaatimukset, suunnittelijan on vastattava myös muihin minimivaatimuksiin, erityisesti kohinan ja lämmönjohtumisen alueella.
GPS-moduulit ovat erityisen herkkiä jännitehuippujen vaihteluiden aiheuttamaan kohinaan. 50 millivolttia on tyypillisesti maksimi sille, mitä ne kestävät. Tältä osin AS3701-piirin DC-DC-muunnin tarjoaa suuren turvamarginaalin (ks. kuva 5).
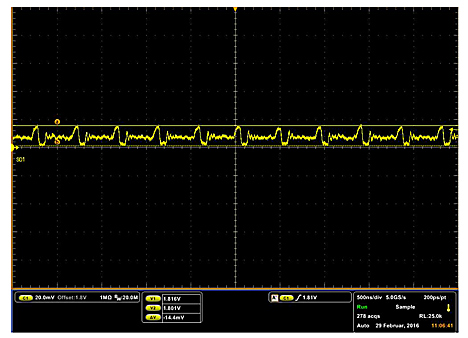
Kuva 5. Lähtöjännitteen värinä (peak-to-peak) AS3701-piirin DC-DC-muuntimesta on selvästi alle tyypillisen GPS-moduulin sietämän 50 millivoltin rajan. Muunnin testattiin 3,7 voltin tulojännitteellä, 1,8 voltin lähtöjännittellä, 20 milliampeerin syöttövirralla ja 2 megahertsin kytkentänopeudella alhaisen kohina (low-noise) tilassa. Värinä oli vain 14,4 millivolttia.
Useimmat älykellon microPMIC-piirin syöttämät virrat ovat alle 50 milliampeeria. Anturit käyttävät yleensä kymmenien mikroampeerien virtoja. Tämä tarkoittaa, että lämpökuorma jää niin pieneksi, että pieni microPMIC-kotelo suoriutuu siitä hienosti.
Korkeimmat virtapiikit aiheuttaa haptinen moottori. Sen käynnistysvirta voi olla jopa 100 milliampeeria, mikä kuitenkin käynnistymisen jälkeen nopeasti putoaa. Alkuvaiheessa käynnistysjännitteen pitää myös olla riittävän korkea, jotta se vastaa käynnistysmäärityksiin, mikä ilmaistaan moottorin datalehdessä.
Tähän vaatimukseen vastataan AS3701-piirillä ohjelmoitavalla LDO:lla. Käyttäjä voi valita laajasta valikoimasta jänniteasetuksia. Ohjelmointia voidaan säätää I2C-liitännän kautta tukemaan haptisen moottorin käynnistymistä ja pysähtymistä, jolloin lähtöjännitettä modifioidaan dynaamisesti tuottamaan käynnistysvaikutukset ja pehmeän värinän tuntu.
MicroPMIC-lähestymistavan edut ja haitat
Edellä mainittiin, että suunnittelija olisi "hullu", mikäli ei käyttäisi prosessorin PMIC-piiriä sellaisen ollessa tarjolla. Olisiko suunnittelija yhtä hullu, mikäli ei käyttäisi microPMIC-piiriä älykellon suunnittelussa?
Selvästikään yhtä pieneen tilankäyttöön ei päästä useilla erillisillä tehokomponenteilla. Jos oletetaan, että kuva 1 esittää älykello- tai fitnessrannekesuunnittelua hyvin, AS3701-piirin kaltainen microPMIC-piiri olisi lähes täydellinen vastaus.
Lisäetuja tulee siitä, että tuetaan suunnittelijan PMIC-valintaa. Yhden ainoan tehokomponentin käyttö helpottaa kokoonpanoa selvästi. MicroPMIC-piiri tuo myös merkittäviä suunnitteluetuja. Kuva 6 esittää ruutukaappausta AS3701-evaluointikortin mukana tulevasta graafisesta käyttöliittymästä. On selvää, että erilaisia jännitelähtöjä step-down -regulaattorille ja LDO-piirille on yksinkertaista ohjelmoida. Käyttöliittymä mahdollistaa myös käynnistysjakson ja lataustoimintojen konfiguroinnin laajalle paristovalikoimalle, sekä useille muille toiminnoille. I2C-liitännän kautta mikro-ohjain voi ohittaa kaikki nämä rekisterit milloin tahansa, joten suunnittelija voi esimerkiksi muuttaa lähtöjännitettä lennossa tai asettaa komponentin valmiustilaan.
Vaikka jotkut suunnittelijat pelkäisivät sitä, että microPMIC-piirin käyttö rajoittaa heidän joustavuuttaan optimoida tehosuunnittelu sovelluksen tarpeiden mukaisesti, useimmille PMIC:n ohjelmoitavuus varmistaa, että jokaista teholinjaa voidaan syöttää oikein kaikkina aikoina yhdellä integroidulla piirillä, joka on kooltaan hämmästyttävän pieni.
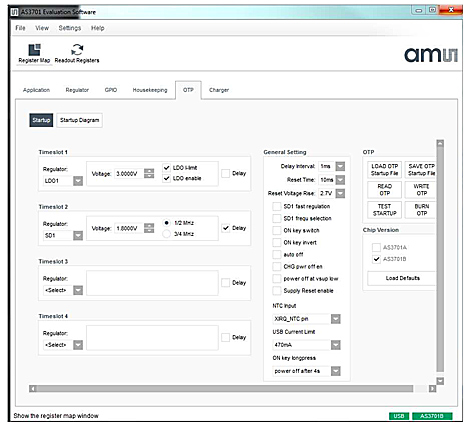
Kuva 6. Ruutukaappaus AS3701-microPMIC-piirin suunnittelutyökalusta.
 Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.
Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.


















