Autonvalmistajat kehittävät nyt täysin autonomista, verkottunutta, ilman kuljettajaa liikkuvaa autoa. Se edellyttää sekä uusia anturiratkaisuja että selväti enemmän laskentakykyä. Puolijohdetalot yrittävät vastata haasteeseen.
Autonvalmistajat kehittävät nyt täysin autonomista, verkottunutta, ilman kuljettajaa liikkuvaa autoa. Se edellyttää sekä uusia anturiratkaisuja että selväti enemmän laskentakykyä. Puolijohdetalot yrittävät vastata haasteeseen.
|
Artikkelin on kirjoittanut Cadencen Automotive-ryhmässä markkinointipäällikkönä toimiva Thomas Wong. |
Analyytikot ja alan tärkeimmät yritykset ovat yhtä mieltä siitä, että autoelektroniikan markkinoilla on tällä hetkellä nähtävissä neljä selvää trendiä, jotka tulevat vaikuttamaan alan kehitykseen koko seuraavan vuosikymmenen. McKinsey & Companyn vuonna 2016 julkaisemassa raportissa ”Automotive revolution – perspective towards 2030” nämä trendit liittyvät kehityskulkuihin, joita tulee tapahtumaan autonomiassa, verkottumisessa, sähköistymisessä ja liikkuvuusominaisuuksissa. Raportin mukaan näillä tekijöillä on suuri, toinen toistaan vahvistava vaikutus, mikä on osittain seurausta siitä, että autoelektroniikan markkinat ovat valmiina mullistukseen.
Tuolloin kuitenkin oli epäselvää, miten verkottumisen kehittymistä tuettaisiin, koska ei ollut varmuutta, miten langattoman infrastruktuurin yhteydet ajoneuvojen välillä (V2V) sekä ajoneuvojen ja muun maailman (V2X) välillä määritellään. Raportin julkaisun aikaan näytti siltä, että täysin itseohjautuvat ajoneuvot ovat todellisuutta vasta vuosien päästä, eivätkä edistyneet ajoavustinjärjestelmät (ADAS) olleet vielä kovinkaan yleisesti tunnettuja. Yhteiskäytössä oleva auto oli tuolloin käsitteenä uusi ja liittyi lähinnä yhteiskäytössä oleviin vuokra-autoihin. Vuonna 2016 sähköajoneuvojen myyntimäärät maailmassa olivat 400 000:n tuntumassa eikä suuria kasvulukuja ollut tuolloin näkyvissä.
Nyt vuonna 2020 edellä mainitut haasteet eivät ole enää ollenkaan niin vakavia. 5G:n yleistymisellä tietoliikenteessä on suuri vaikutus, sillä autoelektroniikkaan liittyvä lyhyen kantaman tiedonsiirron (DSRC) standardi on jo käytössä tuotannossa olevissa ajoneuvoissa. ADAS-ominaisuuksia tukevat DSRC-pohjaiset toteutukset yleistyvät markkinoilla koko ajan. Näitä suosiotaan lisääviä ajoavustimien ominaisuuksia ovat vakionopeudensäätö (ACC), autonominen hätäjarrutus (AEB) ja kaistavahdit (LDW). Ne mahdollistavat tason 2 autonomian perustason ajoneuvojen ja on olemassa myös esimerkkejä malleista, jotka tarjoavat tason 3 autonomiaa. Ja lisää on odotettavissa lähivuosina. Vaikka emme vielä voikaan vuokrata ilman kuljettajaa oleva taksia viemään meitä lentokentälle, käynnissä on itseohjautuvien ajoneuvojen kehittämiseksi runsaasti kehityshankkeita autonvalmistajien, yhteiskäyttöisten ajoneuvopalvelujen toimittajien ja internet-palveluntuottajien toimesta eri puolilla maailmaa.
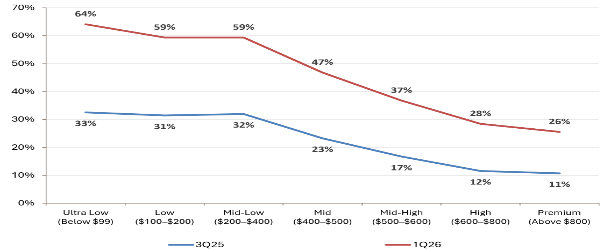
Noista neljästä trendistä alan kehitysnäkymiin vaikuttaa eniten sähköautojen yleistyminen. Vuodesta 2016 myyntimäärät ovat kasvaneet merkittävästi ja pelkästään Kiinassa myytiin vuonna 2019 pari miljoonaa ja Pohjois-Amerikassa noin miljoona sähköautoa. Osansa tästä menestyksestä on seurausta akkutekniikoissa tapahtuneista edistysaskeleista. Olemme lähestymässä taitekohtaa, jossa akun hinta alkaa olla jo varsin kilpailukykyinen. Taitekohtana pidetään yleisesti sataa dollaria kilowattituntia kohden. Tähän hintaan akkusähköautot ovat kilpailukykyisiä polttomoottoriautojen kanssa autoelektroniikan päämarkkinoilla, eivätkä markkinat rajoitu enää kalliimpiin segmentteihin. Sähköautojen suorituskyvyn kehitys on ollut myös vaikuttavaa, sillä sähköautoilla on tehty nopeusennätyksiä ja onpa Tesla asettanut uuden kierrosaikaennätyksen Nürburgringin radalla Saksassa: kierros (12,9 mailin vanhalla radalla) 7 minuutissa 32 sekunnissa.
Kun näitä trendejä tulkitaan puolijohdeyritysten näkökulmasta, niin ajoavustinjärjestelmien ja itseohjautuvuuden sekä vakiintuneidenkin ominaisuuksien kuten tietoviihdejärjestelmien kehittyminen vaatii yhä monimutkaisempia piiriratkaisuja, jotka ovat nyt keskittyneet paljolti SoC-järjestelmäpiireihin. Toimintojen tiheä integrointi on mahdollista uusimmilla 7 ja 16 nanometrin prosessin SoC-piireillä, jolloin saadaan tarvittava suorituskyky edistyneimpienkin ominaisuuksien toteuttamiseksi. Tällä on puolestaan suuri vaikutus tapaan suunnitella autoelektroniikan SoC-piirejä. Suuntana on siirtyminen puolijohdeprosesseissa kohti yhä ohuempia geometrioita, mikä on välttämätöntä, että pystytään täyttämään lupaukset toteuttaa täysin verkottunut, täysin itseohjautuva, ilman kuljettajaa liikkuva ajoneuvo.
Teknologioiden liittäminen yhteen
Ihmiskuljettajan luotettavin anturi on oma silmä. Silmällä näemme värejä, hahmotamme syvyyksiä ja etäisyyksiä, arvioimme nopeuksia ja suuntia sekä sopeudumme vaihteleviin valaistusoloihin. Tämä mahdollistaa vuorovaikutuksemme ulkomaailmaan standardoituja protkollia, kuten tienviittoja hyödyntäen. Kun näitä vaatimuksia sovelletaan itseohjautuviin ajojärjestelmiin, tulee selväksi, kuinka vaativasta tehtävästä on kysymys. Kytkemällä kuva-antureita SoC-siruihin voidaan jäljitellä ihmisen kokemaa aistimusta. Se edellyttää, että järjestelmä saa käyttöönsä tietoa päätöksentekoa varten samalla nopeudella ja tarkkuudella kuin ihmiskuljettaja.
Tämä edellyttää suurempia datamääriä kuin mitä kuva-anturi pystyy tuottamaan. Erityyppisiin anturiteknologioihin pohjautuvien anturien, jotka on hajautettu eri puolille ajoneuvoa, yhdistäminen toisiinsa on ratkaisu toteuttaa itseohjautuvan ajoneuvon ”kuljettajan silmät”. Anturien keräämä tieto käsitellään tyypillisesti yksittäisessä SoC-sirussa latenssiajan minimoimiseksi ja synkronointiongelmien välttämiseksi. Olennaista on myös toteuttaa datasynteesi tekoälyä käyttäen, jolloin suurin osa älytoiminnoista suoritetaan mieluummin SoC-piirillä kuin pilvessä. Nämä vaatimukset asettavat suuria haasteita SoC-piirien suunnittelijoille.
Autonominen ajo edellyttää, että ajoneuvo pystyy havainnoimaan ympäristöään. Tähän tarvitaan antureita, jotka keräävät tietoa tiestä, toisista tienkäyttäjistä ja ajoneuvosta itsestään. Tämä ”paikkatietoisuus” on perusedellytys, että ajoneuvo pystyy navigoimaan turvallisesti, tekemään päätöksen parhaimmasta reitityksestä ja mukautumaan vallitseviin ja muuttuviin olosuhteisiin.
Automaattiajoneuvot tarvitsevat tarkan paikkatiedon turvallisen toiminnan takaamiseksi.
On olemassa kolme pääasiallista laskennallista menetelmää, joita käytetään missä tahansa automaattisessa järjestelmässä paikkatietoisuuden aikaan saamiseksi: tiedon kerääminen kuva- ja signaaliprosessoinnin avulla, havainnointi data-analyysia käyttäen ja päätöksenteko tekoälyn avulla. Kaikki mainitut menetelmät saadaan toteutettua puolijohdeteknologialla ja sulautetuilla ohjelmistoilla eli SoC-piireillä.
Uusimpia ajoavustinten SoC-piirejä
Tällä hetkellä autoissa on jo tason 3 autonomian tuovia piirejä ja laitevalmistajat kehittävät tason 4 autonomian tuovia SoC-siruja. Vielä ei ole aivan selvää ovatko innovatiivisimmat piirit tulossa perinteisiltä piirivalmistajilta vai uusilta tulokkailta kuten autoelektroniikan laitevalmistajilta tai lukuisilta robottiautosiruja kehittäviltä startupeilta. Kun anturoinnin menetelmät muuttuvat kamera- ja tutka-antureista (taso 2) valotutka- (lidar), tutka- ja ultraääniantureihin (taso 3 ja taso 4), anturielementtien yhdistäminen eli ns. anturifuusio monimutkaistuu.
Valotutkalla eli lidarilla on monia etuja, mutta se on edelleen suhteellisen kallis. Sitä vastoin tutkateknologia on ollut jo varsin kehittynyttä pitkään ja siten hinnaltaan edullisempi perusmalleissa käytettäväksi. Nyt mietitään sitä, onko tutkalla riittävästi rahkeita tulla tarpeeksi hyväksi ja nopeaksi, jotta ei tarvitse lidarien halpenemista kaupallisesti kilpailukykyiseksi.
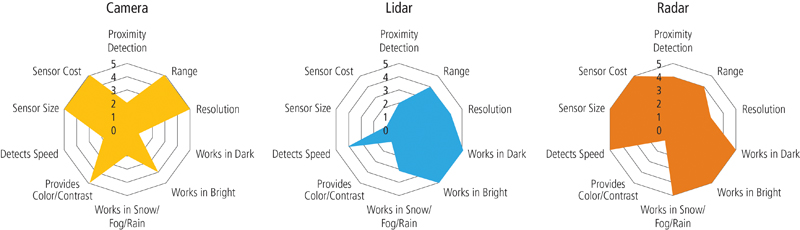
Autonomisissa ajoneuvoissa käytetyn kolmen tärkeimmän anturitekniikan vertailuja.
Yhdistettyinä anturit suorittavat itseohjautuvan ajoneuvon tärkeimmät toiminnot: etäisyyden arvioinnin, liikennemerkkien tunnistamisen, kaistan valvonnan, segmentoinnin ja navigointitiedon mappauksen. Mikään yksittäinen anturiteknologia ei tietenkään sovellu näihin kaikkiin tapauksiin, vaan esimerkiksi vain kuva-anturi pystyy ”näkemään” liikennemerkit, kun taas ainoastaan tutka toimii tehokkaasti sateella tai sumussa. Nopeasti kehittyvä tutkatekniikka mahdollistanee piankin seuraavan sukupolven tutkalla toteutettavat kuvantamisen sovellukset, jolloin tutkan suorituskyky saadaan lähelle valotutkan (lidar) tehoa mutta murto-osalla valotutkan hinnasta. Tällöin tason 3 ja tason 4 automaattiajoneuvoissa tarvittaisiin valotutkia vähemmän kuin nykyisin, jolloin myös kustannukset pienenisivät.
Nykyisin käytössä on toisistaan jonkun verran tyypiltään erilaisia tutkatekniikoita. Lyhyen kantaman tutka tunnistaa hyvin ympäristön kohteita, kun ajoneuvo liikkuu hitaasti pysäköintitilanteissa, keskipitkän kantaman tutka havaitsee hyvin toiset ajoneuvot vierekkäisillä kaistoilla ja pitkän kantaman tutkalla havaitaan ajonopeudella liikkuvat ajoneuvot ja muut kohteet.
Erityyppisten tutkatekniikoiden parissa toimiessa on tärkeää miettiä tarkkaan, miten erilaiset anturit saadaan toimimaan yhdistettynä toisiinsa. Siinä missä jokaisella anturilla on oma tehtäväsarkansa, suurin osa datasta prosessoidaan kuitenkin keskusprosessorissa. Tällöin SoC-sirun on käsiteltävä erilaisilta antureilta tulevaa dataa, kun anturoinnin vaatimukset muuttuvat. Alla olevassa kuvassa esitetään eräiden nyt toteutuksen alla olevien automaattiajossa käytettävien SoC-arkkitehtuurien ominaisuuksia.
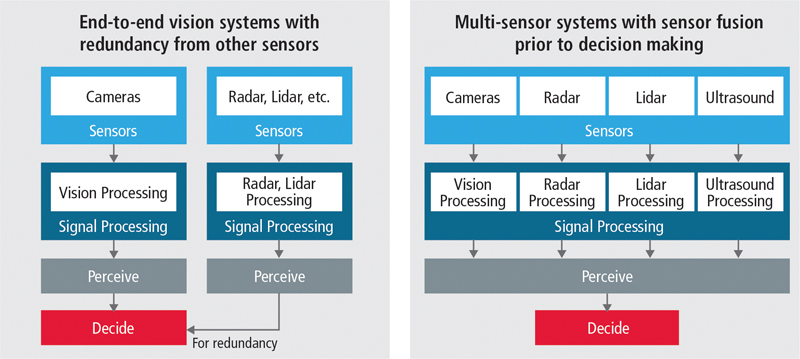
Esimerkkejä automaattiajon sovelluksiin tarkoitetuista SoC-arkkitehtuureista.
Siirtymistä kohti keskitettyä eri antureista koostuvaa anturien yhdistelmää esitetään seuraavan kuvan yksinkertaistetussa lohkokaaviossa. Siinä ajoavustimen SoC-piirille on muodostettu sirulla oleva verkosto, jossa erilaisista osista koostuvassa SoC-arkkitehtuurissa keskitetty tiedonsiirron valtaväylä yhdistää toisiinsa eri toimintalohkot. Tyypillisesti, joskaan ei välttämättä, nämä lohkot pitävät sisällään kuvankäsittelyä, tutkan, valotutkan, navigointia ja tehokasta laskentaa. Yhä enenevässä määrin näissä toiminnoissa tullaan soveltamaan tekoälyä muodossa tai toisessa.
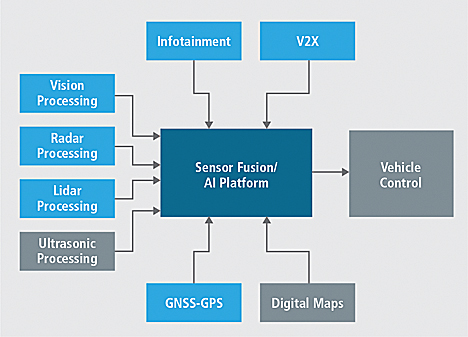
Esimerkki ajoavustinsovelluksiin tarkoitetusta SoC-piiristä lohkokaavioesityksenä.
Piiritasolla tekoälyn soveltamiseen saadaan lisää tehoa yhdistelmällä, jossa on mukana moniydin-CPU:lla varustettuja DSP-piirejä, kuten Tensilican Vision-, Fusion- ja ConnX-prosessoreja, ja uusimpia hermoverkkoprosessoreja, joita edustaa esimerkiksi Tensilican DNA-prosessoriperhe. Nopeat liitännät ovat edellytyksenä näiden suoritinydinten tehokkaalle toiminnalle. Tässä tärkeimpiä tekniikoita ovat:
- LPDDR4/4X
- LPDDR5
- DDR4/5
- GDDR6
- MIPI D-PHY
- MIPI A-PHY
- Gigabit Ethernet (GbE) yhdistettynä aikakriittiseen verkkoon (STN) ja audio-video-siirtoon (AVB)
- 2,5 G, 5 G ja 10 G ajoneuvojen Ethernet
- PCIe 4.0/3.0
- USB3/1
- eMMC/SD/UFS/ONFi
Nykyiset SoC-piirit käyttävät yleisesti LPDDR4:ää 4266 Mb/s:n nopeuksilla, mutta järjestelmän tehonkulutuksen vähentämiseksi nyt ollaan siirtymässä LPDDR4X:ään, joka toimii pienemmillä jännitteillä tarjoten kuitenkin vastaavan nopeuden. Suunnitteluissa siirrytään LPDDR5:n käyttöön heti, kun sen hinta on kilpailukykyinen, mutta DDR4/5:tä yhdistettynä GDDR6:een käytetään, kun halutaan vauhdittaa tekoälyn ominaisuuksia.
MIPI:n odotetaan pysyvän kameraliitäntöjen vaihtoehtona ja keskustelua käydään siitä, sopiiko MIPI A-PHY liitäntäratkaisuksi tarvittavien anturien välille. Jotta data saadaan sujuvasti kulkemaan ajoneuvoverkon suhteellisen pitkillä etäisyyksillä, GbE:n eli gigabitin ethernetin käytön odotetaan yleistyvän. Tallennuskapasiteettina suunnittelijat luottavat standardinmukaisiin flash-ratkaisuihin (eMMC, SD ja UFS). Jotta edellä mainittuja IP-lohkoja voidaan käyttää autoelektroniikan sovelluksissa, on itsestään selvää, että niiden tulee täyttää standardien AEC-Q100:n ja ISO 26262:2018:n vaatimukset.
Yhteenveto
Kun elektroniikan määrä ajoneuvoissa on kasvanut, on puolijohdeteollisuus vastannut tähän kehittämällä integroitujen piirien valmistusprosesseja. Nykyisin ollaan taitekohdassa, jossa autoelektroniikan suoritintoiminnot edellyttävät jo sellaista suorituskykyä, joka vaatii puolijohdevalmistuksen siirtymistä 28 nanometrin prosesseista entistä tiheämpiin viivaleveyksiin. ADAS-järjestelmien yleistyminen ja niiden mukanaan tuoma kysyntä on saanut puolijohdevalmistajat siirtymään entistä tiheämpiin 16 nanometrin ja jopa 7 nanometrin valmistusprosesseihin, jotta markkinoiden vaatimaan suorituskyvyn lisääntymiseen pystytään vastaamaan.
Myös reitti tason 5 autonomiaan on hahmottumassa. Anturien avulla toteutettava kuljettajan korvaaminen asettaa omat haasteensa. Tekoäly tuo jotain ratkaisuja haasteisiin, mutta sen toteuttava teknologia nojaa edelleen puolijohdeteknologiaan, jonka pitää toimia luotettavasti ainakin kymmenen vuotta.





 BLDC-moottorien yleistyessä autoteollisuus etsii skaalautuvia ratkaisuja niiden hiljaiseen ja tehokkaaseen ohjaukseen. Toshiban SmartMCD-ohjainperhe kattaa nyt tehoalueet muutamista wateista kilowattiin.
BLDC-moottorien yleistyessä autoteollisuus etsii skaalautuvia ratkaisuja niiden hiljaiseen ja tehokkaaseen ohjaukseen. Toshiban SmartMCD-ohjainperhe kattaa nyt tehoalueet muutamista wateista kilowattiin.