











Tunnelissa ja tiheässä kaupungissa satelliittien signaali katoaa, eikä paikannus enää onnistu. Avuksi on onneksi kehitetty erilaisia tekniikoita.
| Artikkelin kirjoittaja Florian Bousquet on u-bloxin tuotemarkkinointipäällikkö. Hän on valmistunut elektroniikan ja tietoliikennetekniikan insinööriksi Nizzan yliopiston Sophia Antipoliksen yksiköstä. Vuonna 2007 hän aloitti uransa ST-Ericsonilla sekasignaalipiirien suunnittelussa. Vuonna 2011 hän siirtyi u-Bloxille sovellusinsinööriksi, josta eteni nykyiseen tehtäväänsä elokuussa 2014. |
Yhä tiheämmät kaupunkiympäristöt, katetut pysäköintihallit ja monikerroksiset moottoritiet asettavat suuria ongelmia autojen navigointijärjestelmille. Ongelmien voittamiseksi käytetään kahta tekniikkaa: kuljetun suunnan ja matkan mittaamiseen perustuvaa lokipaikannus (Dead Reckoning) ja karttasovitus (Map Matching). Jälkimmäisen käyttäminen kasvattaa monimutkaisuutta ja tekee navigoinnista riippuvaisen ulkopuolisten tarkasta karttadatasta. Lisäksi karttadata muuttuu jatkuvasti erityisesti tiheissä kaupungeissa.
Vaihtoehtoinen menetelmä on käyttää useampaa sateliittisignaalia hyödyntävää vastaanotinta, joka tuo tarkan paikkatiedon kolmessa ulottuvuudessa ja vähentää riippuvuutta ulkoisesta karttadatasta luotettavan navigoinnin tuottamiseksi. Tässä artikkelissa kuvataan tekniikkaa, jota on menestyksellä demonstroitu vaikeissa olosuhteissa kuten Manhattanilla ja Shanghaissa. Ratkaisu yksinkertaistaa autojen navigointijärjestelmien ohjelmistokehityksen vaatimukset, lyhentää kehitysaikaa ja alentaa sen kustannuksia.
Standardi ADR-ratkaisu (Automotive Dead Reckoning) yleensä hyödyntää fuusioratkaisua, jossa standardista GNSS-vastaanottimesta suodatettu sijainti yhdistetään ulkoiseen gyrosta, kiihtyvyysanturista, ja/tai pyörimisanturista suodatettuun dataan. (Pyörimis- eli Wheel tick -anturit ovat enkoodereita, jotka mittaavat renkaan tarkkaa nopeutta tai etäisyyttä. Enkooderin tyypistä riippuen on mahdollista määritellä myös liikkeen suunta).
Molemmat suotimet ovat Kalman- tai LQE-tyyppisiä (linear quadratic estimation). Ne hyödyntävät aikasarjaa mittaavaa algoritmia satunnaisten variaatioiden kera arvioidakseen tuntemattomia muuttujia. Reaaliaikasuodin ensin arvioi tämänhetkiset muuttujat ja niihin liittyvät epävarmuudet ja sitten käyttävät seuraavaa mittausta päivittääkseen nämä arviot painotettua keskiarvolaskentaa hyödyntäen.
Standardin ADR-järjestelmän rajoituksena on se, että kahden Kalman-suotimen limittäminen tuo väistämättä mukanaan virheiden kertautumisen, mikä heikentää paikannustarkkuutta. Siksi navigointijärjestelmät nojaavat yhä enemmän karttasovitusalgoritmeihin (Map Matching algorithms) voidakseen kompensoida kertautuvia virheitä laskennassa. Tämä tuo mukanaan riippuvuuden ulkoiseen, dynaamisesti muuttuvaan karttadataan, ja ennen kaikkea lisää ohjelmiston kehitystyötä, kun GNSS-vastaanotin pitää liittää ulkoiseen karttapalveluun.
Näiden ongelmien ratkaisemiseksi u-Blox kehitti tiukasti kytketyn ADR-algoritmin, joka sekoittaa dataa yhteen ainoaan Kalman-suotimeen. Ratkaisu, jota on kehitetty nyt neljän tuotesukupolven ajan, yhdistää satelliittinavigointidatan renkaiden pyörimisnopeuteen sekä gyroskoopin ja kiihtyvyysanturin tuottamaan informaatioon. Tämän integroidun ja yksinkertaistetun tekniikan avulla sijaintipaikka-arvioon liittyvien virheiden määrä putoaa minimiin ja tarkka paikannustieto saadaan riippumatta siitä, missä autoa ajetaan, oli auto sitten tunnelissa Sveitsissä tai Manhattanin pilvenpiirtäjien keskellä. Riippuvuus ulkoisista karttapalveluista vähenee merkittävästi, koska tekniikka pystyy paikantamaan sijainnin tarkasti kaupunkiympäristöissä ilman ulkoisen karttadatan apua.
Tämä tarkoittaa, että navigointisuunnittelijat voivat minimoida karttavastaavuuden käyttämisen ja pienentää sen suunnittelun määrää, jossa lokipaikannus integroidaan navigointijärjestelmään. Tämä tarkoittaa suoraan alhaisempia kehityskustannuksia.
Yksisuotimisen ratkaisun toteuttaminen
Tuottaakseen keskeytymättömän paikkatiedon kaikissa ajo-olosuhteissa u-Bloxin 3D ADR -ratkaisu koostuu kahdesta komponentista: sirulle integroidusta ADR-ydintekniikasta – UBX-M8030, joka on tarjolla kahtena AEC-Q100-sertifioituna versiona – ja kompaktista satelliittipaikannuksen NEO-M8L-moduulista.
Sekä autoihin integroitavien että jälkikäteen myytävien paikannusjärjestelmiin suunnitellut piirit vaativat minimaalisesti tai ei ollenkaan esikonfigurointia. Alustavien asetusten jälkeen ne säilyttävät kalibraation pysyvästi. Toinen keskeinen suunnitteluetu on se, että moduulin sijoitus autoon ei riipu sen suunnasta: tätä voidaan kompensoida tehdaskalibroinnissa tai jopa ajon aikana. Tämä yksisuotiminen 3D ADR -ratkaisu paitsi parantaa paikannustarkkuutta selvästi myöskin lyhentää kehitykseen kuluvaa aikaa ja kustannuksia, ja pienentää järjestelmän kokoa ja vähentää sen monimutkaisuutta.
Itsekalibroituvat ADR-piirit, joiden mitat ovat 5,5 x 5,5 x 0,59 milliä, tukevat erilaisia anturiyhdistelmiä kuten pyörimisantureita, 1- ja 3-akselisia gyroskooppeja ja 1- tai 3-akselisia kiihtyyvysantureita. Kiihtyvyysanturituki lisää tarkkuutta ilman satelliittisignaalia, kun korkeus merenpinnasta puuttuu. Piirit perustuvat 72-kanavaiseen M8-ytimeen, jotka antavat ensimmäisen paikkatiedon vain 26 sekunnin kuluttua ns. kylmäkäynnistyksestä. Päällä ollessaan piiri antaa TTFF:n (time-to-first-fix) yhdessä sekunnissa. Piirit ovat Galileo-valmiita ja päivitettävissä ulkoisen flash-muistin firmware-ohjelmiston kautta.
Kuvassa 1 näkyvä NEOM8L-moduuli on mitoiltaan 12,2 x 16,0 milliä ja ensimmäinen laatuaan, johon on integroitu 3D-kiihtyvyysanturi ja gyroskooppi globaalin paikannuspiirin kera. Sen paikannusherkkyys on alan kärkiluokkaa eli -167 dBm. Moduuli nojaa vain sisäiseen kiihtyvyysanturiin ja gyroon laskiessaan tarkan paikkatiedon ajoneuvolle kaikkialla, sisällä ja ulkona. Pitkälle viety integrointi minimoi ulkoisten komponenttien tarpeen, koko ratkaisun fyysisen koon ja materiaalikustannukset.
Kuva 1. NEO-M8L-moduuli on markkinoiden ensimmäinen ratkaisu, johon on integroitu paikannuspiiri, kiihtyvyysanturi ja gyroskooppi.
NEO-M8L-moduulin lohkokaavio on esitetty kuvassa 2.
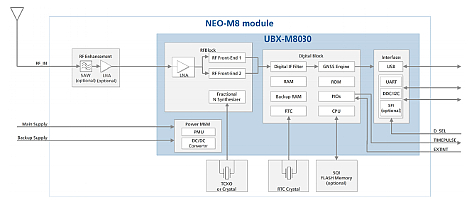
Kuva 2. Kaksi RF-etupäätä mahdollistaa samanaikaisen vastaanoton useasta satelliittijärjestelmästä.
NEO-M8-moduulit käyttävät rinnakkaisia vastaanottimia seuratakseen useita paikannusjärjestelmiä, kuten GPS-, GLONASS-, Galileo-, Beidou- ja QZSS-signaaleja. Kaksitaajuuksinen RF-etupääarkkitehtuuri tarkoittaa, että kahta kolmesta signaalista voidaan vastaanottaa ja prosessoida samanaikaisesti. Oletusarvoisesti M8-vastaanotin on konfiguroitu GPS- ja GLONASS-signaalien samanaikaiseen vastaanottoon. Mikäli vastaanottimen pieni tehonkulutus on tärkeää, se pitäisi konfiguroida ottamaan vastaan vain yhtä signaalia kerrallaan.
Venäjän GLONASS-satelliittijärjestelmä on vaihtoehto amerikkalaiselle GPS:lle. Kyky seurata GLONASS L1oF-satelliitteja ja vastaanottaa niiden lähettämää signaalia antaa mahdollisuuden suunnitella GLONASS-vastaanottimia siellä, missä regulointi sitä vaatii. Moduulit vastaanottavat ja seuraavat myös Beidou-järjestelmän lähettämiä B1-signaaleja. Kyky seurata ja vastaanottaa Beidou B1 -satelliittien signaalia GPS:n rinnalla johtaa laajempaan peittoon, parempaa luotettavuuteen ja suurempaan tarkkuuteen. Beidou tarjoaa tällä hetkellä vain alueellista peittoa, mutta globaalin peiton pitäisi tuolla vuonna 2020. Kun Galileo-järjestelmän E1B/C-signaalit tulevat käyttöön, SQI-flash-muistilla varustettu NEO-M8L-moduuli pystyy vastaanottamaan ja prosessoimaan niitäkin firmware-päivityksen jälkeen.
 Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.
Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.


















