











Yhä useampia laitteita halutaan ohjata kosketuksella vaikka kädessä olisikin hansikas. Luotettava kosketusohjaus myös hanskat kädessä on toteutettavissa, kunhan tekee oikeat valinnat suunnittelua aloitettaessa.
| Artikkelin ovat kirjoittaneet Cypress Semiconductorin tuotepäällikkö Joshan Abraham ja järjestelmäarkkitehti Vibhees Brarathan. Joshanilla on elektroniikkainsinöörin tutkinto Birlan Teknologia- ja Tiedeinstituutista. Hän keskittyy ennen kaikkea uusien kosketuskäyttöliittymien määrittelyyn ja lanseeraukseen Cypressin CapSense- ja PsoC-ohjainten ryhmässä. Vibheesh puolestaan työskentelee CapSense-osaamiskeskuksessa. Hänellä on sulautettujen järjestelmien kehittäjän tutkinto Coventryn yliopistosta Englannista. Sulautettujen järjestelmien suunnittelusta hänellä on 10 vuoden kokemus. |
Kapasitiiviset kosketuskäyttöliittymät ovat korvaamassa mekaaniset napit kaikissa tuotteissa kulutus-, lääketiede- ja teollisuuselektroniikassa. Käyttäjät vaativat nyt kuitenkin edistyneitä toimintoja kuten haptista palautetta ja mahdollisuutta käyttää hanskoja kuten mekaanisten nappien kanssa. Nämä toiminnot parantavat tuotteen käyttäjäkokemusta. Esimerkiksi kosketuskäyttöliittymän ranteessa pidettävässä älyrannekkeessa pitäisi toimia vaikka käyttäjällä on hanskat kädessä kylmän sään takia, ja lääketieteellistä instrumenttia pitäisi voida ohjata myös kumihanskat kädessä.
Luotettavan hanskakosketuksen toteuttamisessa on kaksi haastetta:
- Heikkojen signaalien tunnistaminen hansikas kädessä
- Virheellisten kosketusten sivuuttaminen, kun sormi leijuu anturien päällä
Miksi hanska aiheuttaa heikon signaalin
Kapasitiivinen kosketuksen aistiminen perustuu siihen, että sormi tuottaa muutoksen anturin kapasitanssissa kun se koskettaa anturia suojaavaa pintakerrosta. Tämä muutos kapasitanssissa mitataa ja muunnetaan digitaaliseen muotoon (AD-muunnos) kosketusnäytön ohjaimessa. Kun mitattu arvo ylittää ennalta määritellyn raja-arvon, kosketus rekisteröityy.
Sormen kosketuksen aiheuttama muutos digitoidussa kapasitanssissa muodostaa signaalin ja tarkoittamaton muutos ilman sormen kosketusta on kohinaa. Luotettavaan järjestelmään suositellaan signaali-kohinasuhdetta 5:1. Kuva 1 näyttää, miten kapasitanssia mitataan kosketusjärjestelmässä.
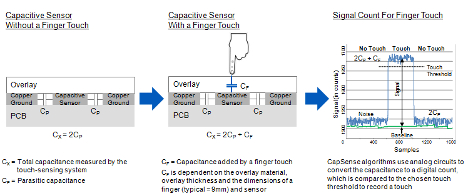
Kuva 1. Kapasitanssin mittaaminen kosketusnäytöllä.
Hansikkaan pitäminen kädessä lisää kuvioon yhden kerroksen. Tämä heikentää signaalin vahvuutta alle ennalta määritellyn raja-arvon, jolloin kosketusta ei havaita. Siksi käyttäjät yleensä ottavat hansikkaan pois kädestä voidakseen ohjata laitteita.
Miksi ”tarkoittamaton leijuminen” aiheuttaa virhekosketuksia?
Kosketusanturi voidaan virittää toimimaan paksumpien kerrosten kanssa lisäämällä sen herkkyyttä. Samoin kosketusanturi voidaan virittää aistimaan kosketus myös silloin, kun kädessä on hansikas.
Ongelma on se, että tämä tuottaa tarkoittamattomia kosketuksia, kun paljas sormi ”leijuu” anturin yläpuolella, koska tämä tuottaa vastaavan kapasitanssin muutoksen kuin kosketus hansikas kädessä (kuva 2). Tämä voi heikentää tuotteen käyttäjäkokemusta.
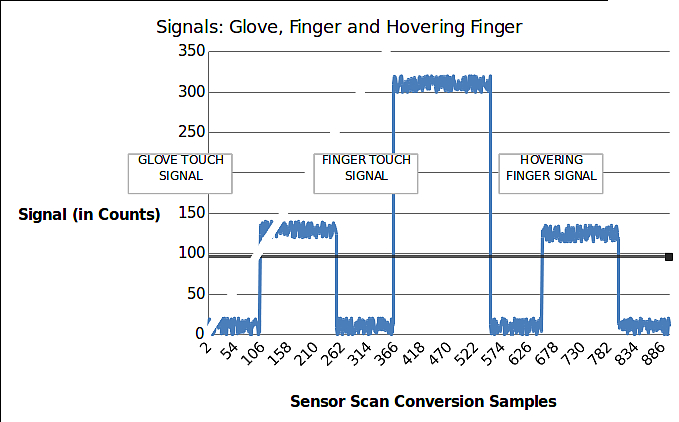
Kuva 2. Signaalit hansikas kädessä, sormikosketuksessa ja sormen leijuessa anturin päällä.
Helppo ratkaisu tähän olisi lisätä laitteeseen käyttäjän tuottama keskeytys tai vaikkapa fyysinen kytkin, jolla ilmaistaan se, onko kädessä hansikas vai ei. Tämä kuitenkin lisää käyttöön yhden lisätoiminnon, ja esimerkiksi lääketieteen laitteiden täytyy toimia samoin kaikissa olosuhteissa.
Avainparametrit signaalin vahvistamiseen
Seuraavia suunnittelun parametreja pitäisi ottaa huomioon kun halutaan parantaa signaalin voimakkuutta hansikas kädessä.
Herkkyys: Kapasitiivisissa näytöissä kosketus aiheuttaa satojen femtofaradien (fF) luokkaa olevan muutoksen kapasitanssissa. Kosketus hansikas kädessä tuottaa tyypillisesti sadan femtofaradin kapasitanssin. Piiri, jonka herkkyys on 500 lukemaa pikofaradia kohti voi tuottaa 50 signaalinarvoa sadan femtofaradin kosketuksesta, kun taas 50 lukemaa pikofaradia kohti aistiva piiri tuottaa vain viisi arvoa. Näin herkempi anturi voi tunnistaa kosketuksen hanskalla selvästi luotettavammin.
Parasiittinen kapasitanssi: Parasiittinen kapasitanssi on anturin luontainen (intrinsic) kapasitanssi, joka syntyy sen joutuessa muiden johtavien osien läheisyyteen. Mitä suurempi suhde kapasitanssin muutoksella ja parasiittisella kapasitanssilla on, sitä herkemmäksi anturi voidaan virittää.
Joihinkin kosketusohjaimiin on integroitu seuraavat kaksi toimintoa, joilla vähennetään ylimääräisen parasiittisen kapasitanssin vaikutusta anturin herkkyyteen:
Virheellisen differentiaalin mittaus: Kosketusohjain, joka osaa mitata virheellistä differentiaalista AD-muunnosta, voidaan asettaa mittaamaan tiettyä kapasitanssin aluetta ja näin saavuttaa suurempi herkkyys. Tämä vaatii kapasitiivista anturia, jossa on 12-bittinen AD-muunnin, jolloin se voidaan virittää aistimaan 512 lukemaa/pikofaradi, vaikka anturin parasiittinen kapasitanssi olisi 16 pikofaradia.
Suojaelektrodien tuki: Anturin suojaaminen muilta johtavilta osilta anturin ympärillä minimoi syntyvän ylimääräisen kapasitanssin määrää ja myös anturin parasiittisen kapasitanssin määrän.
Kohina: Siellä, missä on signaali, on aina myös kohinaa. Kohinaa on kaikki häiriö, joka ei muuta kapasitanssia mutta muuttaa anturin tuotosta. Tietyn raja-arvon ylittävä kohina voi tuottaa vääriä kosketuksia.
Väärien kosketusten välttäminen
Hansikaskosketuksen tuottaman signaalin amplitudi on merkittävästi pienempi kuin tavallisen kosketuksen. Käyttämällä dedikoituja raja-arvoja sormen ja hansikaskosketuksen ero voidaan tunnistaa ja erottaa.
Sormi- ja hansikaskosketuksella voidaan asettaa määrätyt raja-arvot (FThreshold ja GThreshold alla olevassa kuvassa). Tyypillisesti nämä arvot asetetaan 80 prosenttiin normaalin sormi- tai hansikaskosketuksen tuottamasta signaalista.
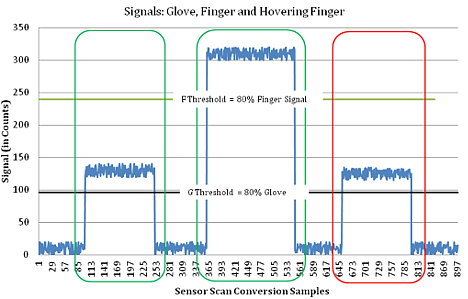
Kuva 3. Määrätyt raja-arvot hansikas- ja sormikosketussignaaleille.
Kun käyttäjä koskee näyttöä, firmware-ohjelmisto tunnistaa onko signaali sormiraja-arvon vaiko vain hansikasraja-arvon yläpuolella. Jos signaalin arvo on sormiraja-arvon yläpuolella, ohjelmisto päättelee ettei käyttäjälle ole hansikkaita kädessään ja sivuuttaa kaikki raja-arvon alle jäävät signaalit. Tämä varmistaa sen, ettei näytön päällä leijuvaa sormea tunnisteta vääräksi hansikaskosketukseksi. Ohjelmiston päättelyketju on esitetty kuvassa 4.
Jos ensimmäinen kosketus tuottaa signaalin, joka ylittää hansikasraja-arvon muttei sormikosketusraja-arvoa, järjestelmä olettaa että käyttäjällä on hanskat kädessään ja jatkaa näiden kosketusten tunnistamista. Mikäli käyttäjä riisuu hanskat ja koskettaa näyttöä, signaalin arvo ylittää sormikosketuksen rajan ja järjestelmä siirtyy välittömästi tilaan, jossa se tunnistaa vain sormikosketuksia.
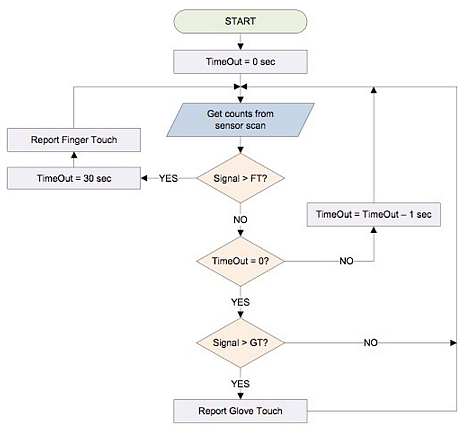
Kuva 4. Firmware-ohjelmiston päättelyketju hansikaskosketuksen tunnistamiseksi raja-arvojen avulla.
Tämän menetelmän suurin puute on se, että mikäli ensimmäinen havaittu signaali tulee leijuvasta sormesta, se voi tuottaa väärän kosketuksen.
Joissakin tuotteissa, kuten matkapuhelimissa, tulostimissa tai laadukkaimmissa kodinkoneissa, on sekä itsenäisesti ohjattu kosketusnäyttö että kosketusnapit käyttöliittymässään, kuten kuvassa 5 näkyy. Tällaisissa järjestelmissä eri ohjainten välinen viestintä voi tehokkaasti auttaa hallitsemaan hansikas- ja sormikosketuksia.
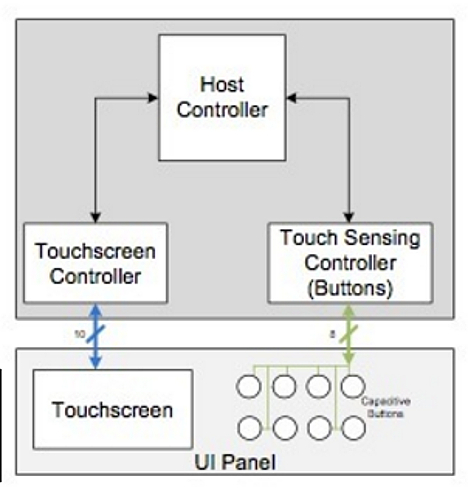
Kuva 5. Kosketusnäytön ja kapasitiivisen napin ohjaimet sisältävä järjestelmä.
Kosketusohjaimet voivat tehokkaasti erottaa näytön päällä ”leijuvan” sormen ja hansikaskosketuksen anturin rakenteen luonteen ansiosta. Hanskassa oleva sormi peittää näytöllä suuremman alueen kuin paljas sormi, tuottaa amplitudiltaan alhaisempia signaaleja suureen joukkoon viereisiä anturisolmuja, kun taas leijuva sormi tuottaa matalan amplitudin signaaleja selvästi harvempiin viereisiin anturimatriisin solmuihin (kuten kuvassa 6 on esitetty). Kosketusohjain käyttää tätä signaalikuvioiden eroa tunnistamaan, onko käyttäjällä hansikkaat kädessään vai ei.
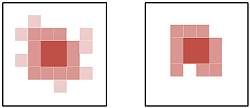
Kuva 6. Hansikaskosketuksen ja leijuvan sormen tuottamat lämpökartat kosketusnäytöllä.
Mikäli näyttö tunnistaa hansikaskosketuksen, informaatio siirretään kapasitiivisen napin ohjaimelle.
Tämä menetelmä ei sovi järjestelmiin joissa ei ole kosketusnäyttöä, koska siinä oletetaan että ensimmäinen kosketus tapahtuu kosketusnäytöllä eikä napeilla. Tämä voi tuottaa vääriä rekisteröityjä kosketuksia.
Jaettu anturisuunnittelu on innovatiivinen, patentoitu ratkaisu, joka ylittää edellä kuvattujen metodien haitat.
Alla olevassa kuvassa näkyy vasemmalla tyypillinen kapasitiivisen anturin sijoittelu, keskellä on optionaalinen reikä leditaustavalolle. Oikealla näkyy jaettu anturirakenne, jossa nappikosketusalue on jaettu kahdeksi dedikoiduksi anturiksi (sisäinen ja ulkoinen anturi).
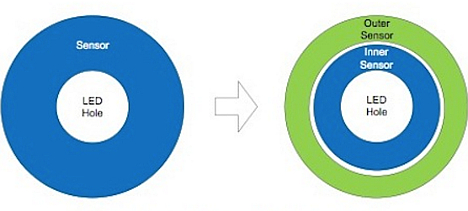
Kuva 7. Tyypillinen kosketusanturi (vas. ) ja jaettu anturirakenne.
Tämän menetelmän perusperiaate on, että erilaiset kosketukset tuottavat yksilölliset signaalikuviot sisä- ja ulkoantureissa. Nämä voidaan firmware-ohjelmistolla tulkita sormen ja hansikkaan eroksi. Kuvassa 8 näkyy tyypillinen signaaliprofiili molemmissa antureissa. Kolme eri skenaariota ovat:
- Hansikaskosketus peittää sekä sisä- että ulkoanturin ja tuottaa alhaisen amplitudin signaaleja sekä sisä- että ulkoanturiin.
- Sormikosketus peittää molemmat anturit ja tuottaa korkean amplitudin signaalit molempiin antureihin.
- Leijuva sormi, jolla on kupera muoto ja on pienempi kuin hansikaskosketuksen profiili, tuottaa vahvemman signaalin sisäanturissa ja suhteellisen heikon signaalin ulkoanturissa.
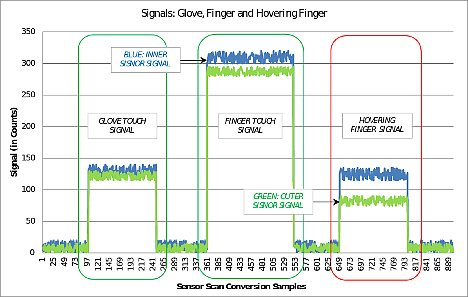
Kuva 8. Tyypilliset signaalit jaetussa anturisuunnittelussa.
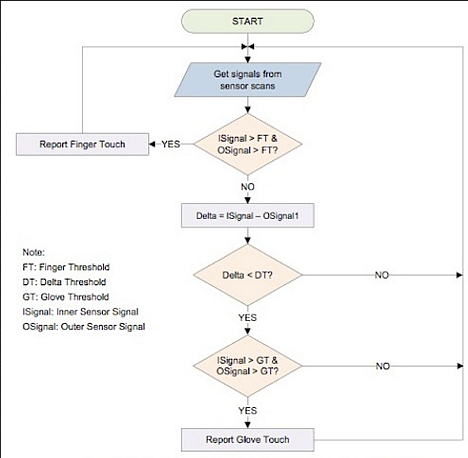
Kuva 9. Jaetun anturisuunnittelun ohjelmiston päättelyketju.
Jaettu anturirakenne on luotettavin menetelmä toteuttaa hansikaskosketus kosketuskäyttöliittymässä.
Lopuksi
Kun hansikasohjaus tulee sovelluksissa yleiseksi toiminnoksi, lopputuotteiden käyttäjät odottavat suorituskyvyn olevan luotettavaa. Oikean kosketusta aistivan ratkaisun valitseminen on tärkein askel kohti sitä, että näyttöpaneelisi toimii aina ja kaikissa tilanteissa.
 Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.
Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.


















