











Mikro-ohjaimeen perustuvan himmentimen avulla voi rakentaa energiatehokkaan hakkurimuotoisen LED-ajurin. Hyvällä hyötysuhteella toimiva ajuri kykenee ohjaamaan useita lediketjuja samanaikaisesti. Näin voidaan parantaa valaistusjärjestelmän suorituskykyä, pidentää ledivalojen elinikää ja lisätä järjestelmän älykkyyttä.
| Artikkelin kirjoittaja Mark Pallones toimii Microchip Technologyn johtavana sovellusinsinöörinä. |
Hakkurimuotoiset himmennettävät LED-ajurit tunnetaan korkeasta hyötysuhteesta ja ledivirran tarkasta ohjauksesta. Ne myös tarjoavat himmennykseen toimintamuotoja, jotka antavat loppukäyttäjälle mahdollisuuden luoda upeita valaistusefektejä ja samanaikaisesti kutistaa valaistuksen tehonkulutusta.
Kahdeksanbittinen mikro-ohjain (MCU) tarjoaa tähän kaikki tarvittavat rakennuspalikat. Sen avulla voidaan muodostaa valaistusratkaisuja, jotka mahdollistavat tiedonsiirron, asiakaskohtaisen räätälöinnin ja älykkään ohjauksen. Lisäksi ytimestä riippumaton lisäosien integrointi tarjoaa merkittävää joustavuutta verrattuna puhtaan analogisen tai sovelluskohtaisen ASIC-ratkaisun toimintaan.
MCU-pohjainen ratkaisu tukee innovaatioita, jotka laajentavat valaistustuotteiden ominaisuuksia ja lisäävät mahdollisuuksia erilaistumiseen. Ennakoiva viankorjaus ja huolto, energiatehokkuuden valvonta, värin ja lämpötilan hallinta sekä etäohjaus ja tiedonsiirto ovat esimerkkejä edistyneistä ominaisuuksista, jotka tekevät älykkäistä valaistusjärjestelmistä entistäkin houkuttelevampia.
Vaikka ledivalojen ohjaimet tarjoavat monia etuja verrattuna aiempiin valaistusratkaisuihin, niiden toteutus tuo myös haasteita. Mutta ei hätää, tämä artikkeli opastaa keventämään suunnitteluhaasteita mikro-ohjaimen avulla ja luomaan erittäin suorituskykyisiä hakkurimuotoisia ajuriratkaisuja, jotka ominaisuuksillaan päihittävät perinteiset ratkaisumallit.
Kahdeksanbittistä mikro-ohjainta voidaan käyttää itsenäisesti jopa neljän ledikanavan ohjaamiseen, mitä suurin osa hyllytavarana saatavista ledivalojen ohjaimista ei pysty tarjoamaan. Kuva 1 esittää, kuinka ledivalojen himmentimet voidaan muodostaa mikro-ohjaimen oheislohkoista.
Kullakin himmenninlohkolla on oma riippumaton kanavansa, joka kykenee ohjaamaan hakkurimuotoista tehonmuunninta ilman tai lähes ilman keskusyksikön (CPU) puuttumista toimintaan. Tämä antaa keskusyksikölle mahdollisuuden suorittaa vapaasti muita tärkeitä tehtäviä kuten valvontatoimia, datansiirtoa ja järjestelmän älykkäitä lisätoimia.
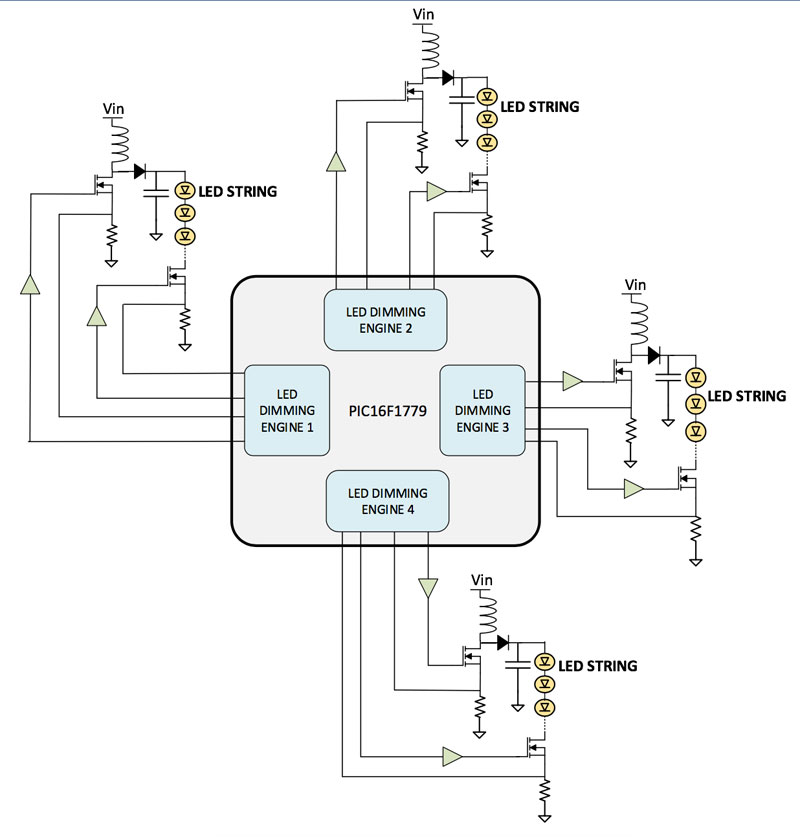
Kuva 1. Nelikanavaisen LED-himmentimen piirikaavio. Himmenninlohkot ajavat itsenäisesti neljää lediketjua Microchipin 8-bittisen PIC16F1779-mikro-ohjainpiirin ohjaamina.
Himmennin CIP-lohkoista
Kuvan 2 LED-himmennin ohjaa virtamuotoiseen boost-muuntimeen perustuvaa lediajuria. Himmennin koostuu pääasiassa ytimestä riippumattomista CIP-oheislohkoista (Core Independent Peripheral), joita ovat esimerkiksi COG-generaattori (Compelmentary Output Generator), DSM-modulaattori (Digital Signal Modulator), ohjelmoitava saha-aaltogeneraattori PRG, komparaattori C, operaatiovahvistin OPA sekä pulssinleveysmodulaattori PWM3. Yhdistämällä näitä CIP-lohkoja muihin oheislohkoihin, kuten kiinteän jännitteen regulaattoreihin (FVR), digitaali-analogiamuuntimiin (DAC) ja sieppaus-vertaus-PWM-lohkoihin (CCP), saadaan koko himmenninyksikkö muodostetuksi.
Kun COG-lohko syöttää suurtaajuisia kytkentäpulsseja mosfetille Q1, energia alkaa siirtyä, ja virtaa syötetään lediketjuun. COG-lohkon lähdön kytkentäajan määräävät CCP-lohko sekä pulssisuhde, joka säilyttää ledivirran vakiona komparaattorin lähdön mukaisesti. Komparaattori tuottaa lähtöpulssin aina, kun RSENSE1-vastuksen yli vaikuttava jännite ylittää PRG-lohkon lähtöjännitteen tason. PRG-lohko, jonka tulosignaali tuodaan takaisinkytkentäsilmukkaan sijoitetun operaatiovahvistimen lähdöstä, on asetettu kompensoimaan pulssien nousuaikoja, jotta luontaiset aliharmoniset värähtelyt saadaan eliminoitua, kun pulssisuhde ylittää 50 prosenttia.
OPA-lohko on toteutettu virhevahvistimena (EA) tyypin II kompensaattorikokoonpanolla. FVR-lohkoa käytetään DAC-lohkon tulona antamaan jännitereferenssi operaatiovahvistimen ei-kääntävään tuloon ledin vakiovirtamääritykseen perustuen.
Himmennyksen saavuttamiseksi PWM3-lohkoa käytetään CCP-lohkon modulaattorina, kun mosfetiä Q2 ohjataan nopeaan tahtiin kytkemään lediketju päälle ja pois. Modulointi on mahdollista DSM-moduulin kautta, ja moduloitu lähtösignaali syötetään COG-lohkolle. PWM3-lohko syöttää pulssisuhteeltaan vaihtelevia pulsseja, jotka määräävät ohjaimen keskimääräisen virran ja siten käytännössä myös ledivalon kirkkauden.
LED-himmennin ei ainoastaan yllä samaan kuin tavanomainen ledinohjain, vaan lisäksi sillä on ominaisuuksia, jotka ratkaisevat lediajurien tyypillisiä ongelmia. Seuraavassa käydään läpi näitä ongelmia ja miten himmenninratkaisua voidaan käyttää niiden välttämiseen.
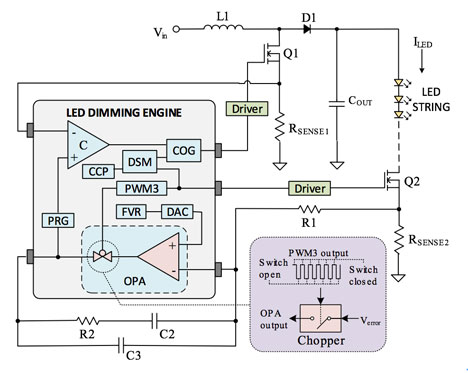
Kuva 2. LED-himmentimen rakenne.
Välkkyminen kuriin
Välkkyminen on yksi ongelmista, joita tavanomaisissa himmennettävissä lediajureissa voi esiintyä. Välkkyminen voi olla hauska efekti silloin, kun se on tarkoituksellista, mutta omin päin välkkyvät ledit voivat pilata käyttäjän haluaman valaistuksen kokonaan.
Jotta välkynnältä vältyttäisiin ja saataisiin tasainen himmennystoiminta, ohjaimen tulee suorittaa himmennysoperaatio täydestä valotehosta aina himmeimmälle tasolle asti tasaisen juohevasti. Koska ledi reagoi välittömästi virranmuutoksiin eikä sillä ole luontaisesti hiipuvaa jälkihehkua, ohjaimella täytyy olla riittävän suuri määrä himmennysportaita, jotta silmä ei erota valon äkkinäisiä muutoksia.
Tämän vaatimuksen täyttämiseksi himmennin käyttää PWM3-lohkoa ohjaamaan lediketjun himmennystä. Lohko koostuu resoluutioltaan 16-bittisestä PWM-modulaattorista, joten 100% ja 0% pulssisuhteen väliin mahtuu 55536 porrasta, mikä takaa valaistukselle pehmeän sulavasti sujuvan himmennyksen.
Värilämpötila vakaaksi
Ohjausyksikkö saattaa myös muuttaa ledivalon värilämpötilaa. Tällainen värimuutos voi näkyä käyttäjälle ja heikentää käsitystä ledivalaistuksen korkeasta laadusta. Kuvassa 3 on esitetty tyypillisen PWM-himmentimen aaltomuodot. Kun ledi ei pala, sen läpi kulkeva virta pienenee vähitellen lähtökondensaattorin varauksen hitaan purkautumisen vuoksi. Tämä saattaa johtaa siirtymään ledin värilämpötilassa ja myös suurempaan tehohäviöön.
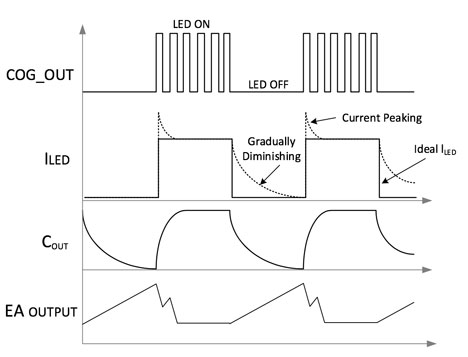
Kuva 3. Ledivalon himmennyksen aaltomuodot.
Lähtökondensaattorin hidas purkautuminen voidaan estää käyttämällä kuormana kytkintä. Kuvassa 2 esimerkiksi käytetään fettiä Q2 kuormakytkimenä. LED-himmennin katkaisee synkronisesti COG- ja PWM-lähdöt sekä Q2-kytkimen, jolloin virtapolku katkeaa ja ledi sammuu nopeasti.
Virtapiikit pois
Kun ledin ohjaamiseen käytetään hakkurimuotoista muunninta, takaisinkytkentäpiiriä käytetään säätämään ledin virtaa. Himmennyksen aikana takaisinkytkentäpiiri voi kuitenkin synnyttää virtapiikkejä (kuva 3) ellei toimintaa hallita oikealla tavalla.
Kuvan 2 ledin ollessa päällä siihen syötetään virtaa, ja vastuksen RSENSE2 yli vaikuttava jännite syötetään virhevahvistimelle (EA). Kun ledi sammuu, sen läpi ei kulje virtaa ja jännitehäviö vastuksen RSENSE2 yli on nolla. Tämän himmennysjakson aikana EA-lähtö kasvaa maksimiarvoonsa ja ylivaraa kompensointipiirin. Kun moduloitu PWM kytkeytyy jälleen, palautumiseen tarvitaan useita signaalijaksoja korkean virtapiikin siirtyessä lediin. Tämä virtapiikki-ilmiö lyhentää ledin elinikää.
Ongelman välttämiseksi himmennin käyttää PWM3-lohkoa operaatiovahvistimen ohituslähteenä. Kun PWM3 on alhaalla, virhevahvistimen lähtö on korkeaimpedanssisessa tilassa (tristate). Tämä katkaisee täydellisesti kompensointipiirin takaisinkytkentäsilmukasta ja säilyttää viimeisimmän stabiilin takaisinkytkentäpisteen kompensointikondensaattoriin tallennettuna varauksena.
Kun PWM3 nousee ylös ja ledi syttyy jälleen, kompensointipiiri kytkeytyy uudelleen. Sen seurauksena virhevahvistimen lähtöjännite hyppää välittömästi aiempaan stabiiliin tilaansa (ennen PWM3:n alasajoa) ja palauttaa ledivirran asetusarvon lähes välittömästi.
Täydellinen ratkaisu
Kuten aiemmin mainittiin, LED-himmennin voi toimia ilman tai lähes ilman CPU:n väliintuloa. Tästä syystä keskusyksikölle jää huomattavan suuri kaistanleveys muiden tärkeiden tehtävien suorittamiseksi samalla, kun se luovuttaa CIP-lohkoille kaiken lediketjun ohjaamiseen tarvittavan työn.
Suojausominaisuudet kuten alijännitesuojaus (UVLO), ylijännitesuojaus (OVLO) ja lähdön ylijännitesuojaus (OOVP) voidaan suorittaa prosessoimalla piiristä mitattuja tulo- ja lähtöjännitteitä. Näin varmistetaan, että lediajuri toimii halutulla tavalla ja lediketju on suojattu tulo- ja lähtöpiirien poikkeavilta tilanteilta. CPU voi prosessoida myös lämpöanturin tuottamaa dataa lediketjun lämmönhallinnan toteuttamiseksi.
Lisäksi säädettäessä lediajurin himmennystasoa keskusyksikkö voi käsitellä liipaisutietoja yksinkertaisen ulkopuolisen kytkimen tai sarjamuotoisen tiedonsiirron antamien komentojen ohjaamana. Myös lediajurin parametreja voidaan lähettää sarjamuotoisena siirtona valvontaa tai testausta varten.
Edellä mainittujen ominaisuuksien lisäksi suunnittelijalla on upea mahdollisuus lisätä omaan ledisovellukseensa älykkyyttä kuten DALI- ja DMX-protokollien mukaisia toimintoja sekä asiakaskohtaisesti räätälöityjä ohjaustoimintoja. Kuvassa 4 on esimerkki täydellisestä hakkurimuodossa toimivasta LED-himmennysajurista, joka perustuu Microchipin mikro-ohjainpiiriin.
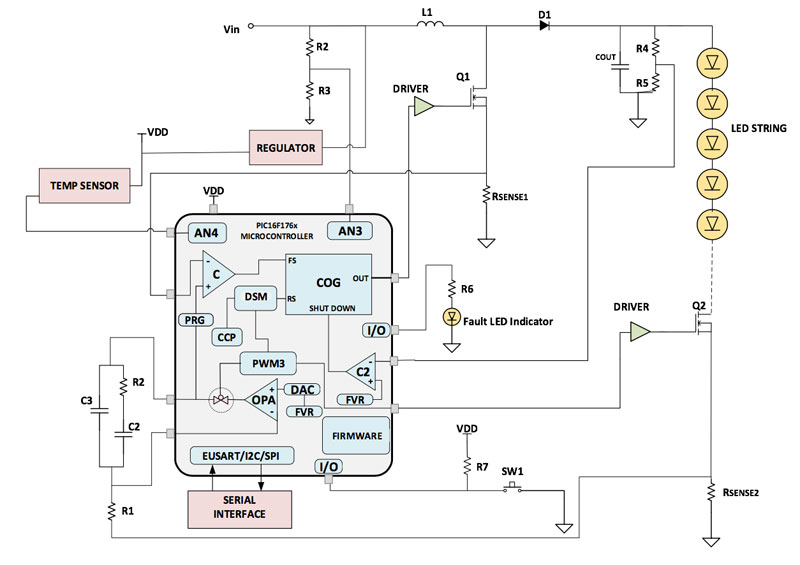
Kuva 4. Hakkurimuotoinen himmennettävä lediajuri täydellisenä.
 Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.
Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.


















