










 Tehokas anturiteknologia ja älykäs reunalaskenta mullistavat teollisuusrobottien kyvykkyyksiä. Yhdistämällä reaaliaikaisen havainnoinnin ja paikallisen päätöksenteon nämä AI-ohjatut järjestelmät pystyvät toimimaan tarkemmin, nopeammin ja itsenäisemmin kuin koskaan ennen.
Tehokas anturiteknologia ja älykäs reunalaskenta mullistavat teollisuusrobottien kyvykkyyksiä. Yhdistämällä reaaliaikaisen havainnoinnin ja paikallisen päätöksenteon nämä AI-ohjatut järjestelmät pystyvät toimimaan tarkemmin, nopeammin ja itsenäisemmin kuin koskaan ennen.
| Artikkelin on kirjoittanut Mouser Electronicsin Mark Patrick. Hän tuli Mouserin palvelukseen kesällä 2014 työskenneltyään aiemmin RS Componentsilla markkinointitehtävissä ja sitä ennen Texas Instrumentsissa sovelluskehityksen tuessa. Hänellä on elektroniikkainsinöörin tutkinto Coventryn yliopistosta. |
Tekoälyn (AI) integrointi robotiikkaan muuttaa nopeasti teollisuusympäristöjä, muuttaen perinteisen automaation dynaamisiksi järjestelmiksi, jotka voivat oppia, sopeutua ja tehdä perusteltuja päätöksiä. Varastoissa liikkuvista autonomisista roboteista kokoonpanolinjoja optimoiviin robottikäsiin (Kuva 1) tekoäly mahdollistaa koneiden toiminnan ennalta määrättyjen rutiinien ulkopuolella sekä älykkään vuorovaikutuksen ympäristönsä kanssa. Tämän toiminnallisen harppauksen taustalla on kuitenkin yksi ratkaiseva mahdollistaja: ympäristön havainnointi. Jotta tekoäly voisi toimia tehokkaasti robottialustoissa, sen on perustuttava tarkkaan, reaaliaikaiseen tietoon fyysisestä maailmasta. Ilman korkealaatuista havaintokykyä jopa kehittyneimmät algoritmit jäävät vajaiksi.
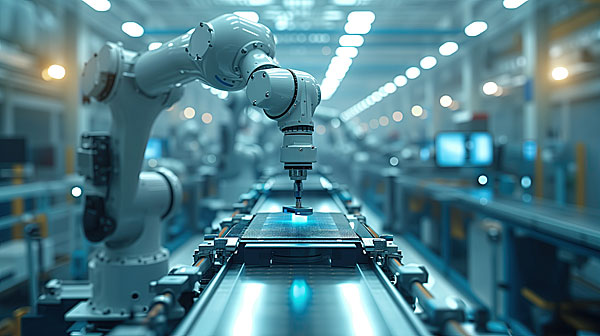
Kuva 1. Tekoälyn ohjaamat teollisuusrobotit mullistavat modernia valmistusta, mutta menestys riippuu niiden kyvystä havaita ja reagoida todellisiin ympäristöihin (Lähde: AdobeStock).
Tämä artikkeli tarkastelee havainnointiteknologioiden ja tekoälyn symbioottista suhdetta robotiikassa, keskittyen siihen keskeiseen rooliin, jota sensorit ja sulautettu älykkyys näyttelevät koneiden suorituskyvyn parantamisessa. Siinä käsitellään havaintokykyisiin robotteihin liittyviä insinöörihaasteita sekä kuvataan, miten Mouser Electronicsin tarjoamat laitteistoratkaisut tukevat uuden sukupolven älykkäiden koneiden kehittämistä.
Tekoälyn ja havainnoinnin kriittinen risteys robotiikassa
Havainnointiteknologiat ovat olennaisia tekoälyllä varustettujen robottien kehittämisessä ja käytössä. Ne mahdollistavat robottien ympäristön kriittisen tiedon keräämisen, jota tekoälyalgoritmit käyttävät päätöksentekoon, muutoksiin sopeutumiseen ja monimutkaisten tehtävien suorittamiseen. Näköanturit, liikeanturit sekä valotutka- eli lidar-järjestelmät ovat työkaluja, joiden avulla robotit rakentavat tilannetietoisuutta ja liikkuvat tarkasti ympäristössään.
Tarkka havainnointi on välttämätöntä paitsi reaaliaikaisessa toiminnassa myös tekoälyn koulutuksessa (Kuva 2). Koneoppimismallit tarvitsevat valtavia määriä korkealaatuista dataa oppiakseen kaavoja, tehdäkseen ennusteita ja yleistääkseen eri tilanteisiin. Jos syötedata on epäjohdonmukaista tai huonolaatuista, tekoälyn suorituskyky todellisissa ympäristöissä kärsii. Vahvat sensorisyötteet sen sijaan mahdollistavat tekoälyjärjestelmien hienosäädön, poikkeamien havaitsemisen ja esimerkiksi ennakoivan huollon tai mukautuvan ohjauksen luotettavan toteuttamisen.
Kuva 2. Kehittyneet havainnointiteknologiat, kuten näköjärjestelmät, liikeanturit ja lidar tuottavat oleellista dataa, joka ohjaa tekoälypohjaista päätöksentekoa robotiikassa (Lähde: AdobeStock).
Lisäksi havainnointi toimii sillanrakentajana fyysisen ja digitaalisen maailman välillä. Sensoripalautteen avulla robotit voivat jatkuvasti seurata omia toimiaan ja säätää niitä vastaavasti. Tämä palautesilmukka parantaa oppimista ja mahdollistaa reaktiivisen käyttäytymisen dynaamisissa ympäristöissä. Näiden järjestelmien älykkyys ei siis ole itseensä sulkeutunutta, vaan tiukasti sidoksissa niiden saaman havaintodatan laatuun.
Insinöörihaasteet ja suunnittelunäkökohdat havaintokykyisissä roboteissa
Vaikka havainnointiteknologioiden arvo on selvä, niiden integrointi robottialustoihin tuo mukanaan merkittäviä insinöörihaasteita. Yksi perustavanlaatuisimmista ongelmista on varmistaa, että useista sensoreista tuleva data on tarkasti kalibroitu ja synkronoitu. Ympäristön vaihtelevuus lisää monimutkaisuutta: valaistusolosuhteet, lämpötilavaihtelut ja pintojen heijastavuus voivat vaikuttaa anturien mittauksiin ja järjestelmän vakauteen.
Insinöörien on myös mietittävä, miten havainnointijärjestelmiä voidaan laajentaa eri robottialustoihin. Ratkaisut, jotka toimivat hallituissa ympäristöissä, voivat epäonnistua kentällä, jossa ennakoimattomuus on normaalia. Skaalautuvuuden on siksi kuljettava käsi kädessä luotettavuuden kanssa, mikä vaatii tarkkaa virheenkäsittelyä, vikasietoisuutta ja sopeutumiskykyä sekä laitteisto- että ohjelmistojärjestelmissä.
Alhainen viive ja reaaliaikainen vaste luovat painetta järjestelmäarkkitehtuurille. Keskitetty pilviprosessointi ei usein kykene tarjoamaan vaadittua nopeutta välittömään päätöksentekoon. Tämä on lisännyt reunalaskennan merkitystä, jossa tehokkaita mikro-ohjaimia (MCU) ja prosessoreita käytetään suoraan laitteessa havainnointi- ja tekoälytehtävien käsittelyyn. Näiden komponenttien on oltava riittävän energiatehokkaita toimiakseen virta- ja lämpörajoitusten puitteissa, mutta samalla riittävän tehokkaita monimutkaisen sensorifuusion ja tekoälyinferenssin eli -päättelyn toteuttamiseen.
Havainnointiteknologioiden onnistunut integrointi edellyttää tiivistä yhteistyötä laitteisto- ja ohjelmistosuunnittelun välillä (Kuva 3). Anturiliitännät, datapolut ja koneoppimismallit on kehitettävä rinnakkain pullonkaulojen minimoimiseksi ja vastekyvyn maksimoimiseksi. Valmistajien tarjoamat kehitystyökalut ja referenssimallit voivat nopeuttaa tätä prosessia, tarjoten insinööreille validoituja alustoja, joilla he voivat prototypoida ja hioa suunnittelujaan.

Kuva 3. Vahvojen havaintojärjestelmien integrointi edellyttää insinööreiltä tasapainoilua sensoritarkkuuden, reaaliaikaisen prosessoinnin ja järjestelmän resilienssin välillä monimutkaisissa teollisuusympäristöissä. (Lähde: AdobeStock).
Innovatiivinen laitteisto perustuu robottien havaintokykyyn
Mouser tarjoaa valikoiman komponentteja, jotka auttavat insinöörejä vastaamaan havainnointikykyisten robottien vaatimuksiin. Seuraavat tuotteet tuottavat luotettavaa, reaaliaikaista dataa ja mahdollistavat reunalaskentaan perustuvan tekoälykäsittelyn, mikä lopulta johtaa älykkäämpiin ja suorituskykyisempiin robottijärjestelmiin.
STMicroelectronicsin MCU-sarja on erinomainen esimerkki siitä, miten sulautettu laskentateho mahdollistaa uuden sukupolven robottien havainnointikyvyn. Nämä mikro-ohjaimet yhdistävät nopean suorituskyvyn ja integroidun tekoälykiihdytyksen, mikä tekee niistä hyvin soveltuvia useiden sensorivirtojen käsittelyyn samalla kun koneoppimismalleja ajetaan paikallisesti. STM32N6-perhe sisältää Arm Cortex-M-ytimet Helium-vektoriprosessoinnilla, mikä mahdollistaa tehokkaan digitaalisignaalinkäsittelyn, joka on välttämätöntä havaintotehtävissä. Lisäksi ST Neural-ART Accelerator , joka on ST:n itse kehittämä neuroverkkokiihdytin, mahdollistaa vähävirtaisen tekoälyinferenssin reunalla.
Kehityksen ja integroinnin nopeuttamiseksi STMicroelectronics tarjoaa myös STM32N6570 DK Kitin. Tämä kehitysalusta on suunniteltu tukemaan reunalaskentapohjaisia tekoälyprojekteja tarjoamalla insinööreille pääsyn laajaan työkalujen ja kirjastojen ekosysteemiin. Se helpottaa tekoälyllä varustettujen havaintojärjestelmien käyttöönottoa ja mahdollistaa robottisovellusten sujuvan prototypoinnin.
Sisäisen tilatietoisuuden ylläpito on ulkoisen havainnoinnin ohella yhtä tärkeää robottijärjestelmien hallinnan ja vakauden kannalta. Murata vastaa tähän tarpeeseen gyroskoopilla, kompaktilla ja erittäin tarkalla laitteella, joka tallentaa tarkkaa liike- ja asentodataa. Tämä komponentti on keskeinen suljetun ohjaussilmukan mahdollistamisessa ja tarkan navigoinnin varmistamisessa erityisesti liikkuvissa roboteissa.
SCH16T-K01-sensorikortti parantaa kehitystyötä tarjoamalla tehdaskalibroidun alustan, joka virtaviivaistaa integrointia. Insinöörit hyötyvät lyhyemmistä käyttöönottoajoista ja suuremmasta luottamuksesta sensorisyötteidensä johdonmukaisuuteen. Tämä mahdollistaa nopeamman iteroinnin ja luotettavamman robottisuorituksen etenkin tilanteissa, joissa sisäistä dynamiikkaa on seurattava jatkuvasti.
Ulkoiseen ympäristön kartoitukseen LightWaren lidar tarjoaa erinomaisen suorituskyvyn kompaktissa koossa. Tämä pieni ja kevyt lidar-skannausmoduuli sopii erityisen hyvin robottialustoihin, joissa tila ja paino ovat kriittisiä. Pienestä koostaan huolimatta se tarjoaa korkean resoluution skannausta, mahdollistaen tarkan esteiden tunnistuksen ja tilakartoituksen.
SF45-B auttaa robottijärjestelmiä navigoimaan ennakoimattomissa ympäristöissä tarjoamalla tarkkoja etäisyysmittauksia ja pintaprofiileja. Sen kyky toimia luotettavasti monenlaisissa valaistus- ja sääolosuhteissa tekee siitä ihanteellisen ulko- tai mobiilisovelluksiin. Insinöörit voivat integroida tämän moduulin antaakseen roboteille tärkeän kerroksen ulkoista tietoisuutta, mikä parantaa turvallisuutta ja autonomiaa ilman tarpeetonta monimutkaisuutta järjestelmässä.
Yhdessä nämä laitteistoratkaisut tarjoavat insinööreille työkalut, joilla tuoda kehittyneitä havaintokykyjä todellisiin robottijärjestelmiin. Jokainen komponentti näyttelee omaa, mutta toisiinsa kytkeytyvää rooliaan älykkäämpien ja tietoisempien koneiden mahdollistamisessa.
Älykkään robotiikan perusta on selkeä näkeminen
Tekoälyllä varustetun robotiikan älykkyys ei perustu vain kehittyneisiin algoritmeihin. Se on havainnointiteknologioiden tarkkuus ja johdonmukaisuus, jotka mahdollistavat robottien ympäristön ymmärtämisen ja siihen vuorovaikuttamisen. Sisäisistä gyroskoopeista ulkoisiin lidareihin ja tekoälyvalmiisiin mikro-ohjaimiin – oikea laitteisto muodostaa jokaisen onnistuneen robottijärjestelmän perustan.
Havaintokykyisen robotiikan suunnittelu edellyttää monimutkaisten haasteiden hallintaa, kuten reaaliaikaista datankäsittelyä, luotettavaa sensorifuusiota ja reunalaskentaa. Vankkojen kehitystyökalujen ja huolellisesti suunniteltujen komponenttien, kuten Mouserin tarjoamien, avulla insinöörit voivat voittaa nämä esteet ja vapauttaa koneissaan uusia autonomian ja älykkyyden tasoja.
Alan kehityksen jatkuessa havainnointi pysyy robotiikan innovaation ytimessä, ohjaten edistystä, muokaten kyvykkyyksiä ja määrittäen koneälyn seuraavaa rajapintaa.



 BLDC-moottorien yleistyessä autoteollisuus etsii skaalautuvia ratkaisuja niiden hiljaiseen ja tehokkaaseen ohjaukseen. Toshiban SmartMCD-ohjainperhe kattaa nyt tehoalueet muutamista wateista kilowattiin.
BLDC-moottorien yleistyessä autoteollisuus etsii skaalautuvia ratkaisuja niiden hiljaiseen ja tehokkaaseen ohjaukseen. Toshiban SmartMCD-ohjainperhe kattaa nyt tehoalueet muutamista wateista kilowattiin.











 <
<


