











Magneettiset sijaintianturit ovat osoittautuneet hyvin suosituiksi monissa liike- ja moottorinohjaussovelluksessa teollisuuden ja autoelektroniikan alueilla. Itävaltalaisen ams:n 3D-magneettiantureiden uusin sukupolvi aistii magneettivuota kolmessa ulottuvuudessa, minkä ansiosta niitä voidaan hyödyntää selvästi laajemmalla sovellusalueella kuin aiemmin.
Artikkelin ovat kirjoittaneet ams AG:n David Schneider ja Marcel Urban. David Schneider (kuvassa)  valmistui FH Joanneum Kapfenbergin yliopistosta. Hän siirtyi heti valmistumisensa jälkeen ams:n palvelukseen 3D-magneettiantureiden sovellusinsinööriksi. Marcel Urban on tyskennellyt ams:llä sovelluspäällikkönä kolmen vuoden ajan. Sitä ennen hän työskenteli austriamicrosystems AG:ssä yhteensä 12 vuoden ajan. Marcelilla mikroelektroniikan diplomi-insinöörin tutkinto Kärntenin ammattikorkeakoulusta. valmistui FH Joanneum Kapfenbergin yliopistosta. Hän siirtyi heti valmistumisensa jälkeen ams:n palvelukseen 3D-magneettiantureiden sovellusinsinööriksi. Marcel Urban on tyskennellyt ams:llä sovelluspäällikkönä kolmen vuoden ajan. Sitä ennen hän työskenteli austriamicrosystems AG:ssä yhteensä 12 vuoden ajan. Marcelilla mikroelektroniikan diplomi-insinöörin tutkinto Kärntenin ammattikorkeakoulusta. |
Sijainnin selvittämiseksi on kehitetty erilaisia tapoja mitata magneettivuon tiheyttä. Tämä on johtanut täysin integroitujen magneettisten sijaintianturipiirien kehittämiseen, jotka sisältävät magneettianturielementin, signaalinkäsittelyn ja signaalinprosessoinnin yhdellä ja samalla sirulla. ams:n 3D-magneettiantureiden uusin sukupolvi kykenee aistimaan magneettivuota kolmessa ulottuvuudessa, minkä ansiosta niitä voidaan hyödyntää paljon suuremmassa määrässä sovelluksia kuin aiemmin (ks. kuva alla).
Käytetään magneettiseen aistimiseen mitä tapaa tahansa, magneettisuus on aina kestävämpi ja luotettavampi metodi kuin optinen aistiminen tai potentiometrien käyttö sijainnin määrittelyyn, koska sitä eivät häiritse pöly, lika, rasva, tärinä tai kosteus, jotka usein ovat riesana autojen ja teollisuuden ankarissa olosuhteissa.
Suunnittelijat, jotka käyttävät perinteisiä magneettiantureita, kohtaavat kuitenkin yhä enemmän ongelmia. Hajasäteilevät magneettikentät aiheuttavat häiriöitä, mitkä vääristävät anturin tuotosta tai pienentävät signaalikohinasuhteen liian huonoksi. Myös hyvin tunnettu hajasätelyn aiheuttama vikaantuminen haittaa erityisesti turvallisuuskriittisissä sovelluksissa, joissa auton järjestelmien täytyy vastata ISO26262-standardin ankaria toiminnallisia riskien hallinnan vaatimuksia.
Autoissa riskiä on kasvattanut sähköjärjestelmien lisääntyminen. Suuria virtoja kuljettavat moottorit ja kaapelit ovat hyvin voimakkaita magneettisen hajasäteilyn lähteitä, ja niitä löytyy myös monista teollisuussovelluksista.
Vastatoimet, joilla magneettianturia suojataan hajasäteilyltä, ovat hankalia ja kalliita. Kuten tässä artikkelissa osoitetaan, parempi keino on tehdä anturi mahdollisimman immuuniksi magneettista hajasäteilyä vastaan.
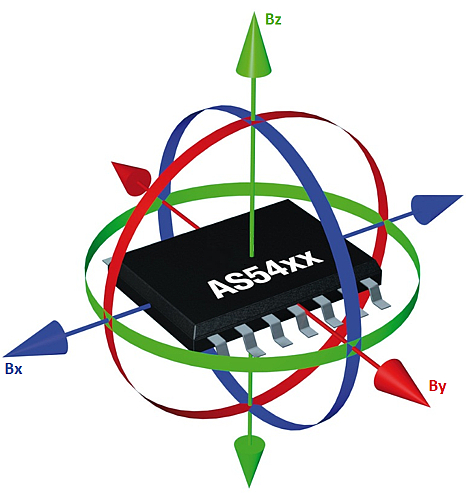
3D-magneettianturia ympäröivän magneettikentän kolmen vektorin visualisointi.
Keinot suojata anturia hajasäteilyltä
Yleinen keino ratkaista hajasäteilyn ongelma on suojata anturipiiri kuorirakenteella. Tämä on huono työkalu kahdesta syystä. Ensinnäkin suojakuoren materiaali vaikuttaa hajasäteilyn lisäksi magneetin kenttään, johon anturi on paritettu (paritettu magneetti on liitetty mitattavaan liikkuvaan objektiin). Kun paritettu magneetti liikkuu staattista sijaintianturia kohti tai siitä poispäin, se muuntaa magneettivuon muutokset täsmällisiksi sijaintimittauksiksi.
Kuorimateriaali voi magnetisoitua itsekin ja sen ominaisuuksilla on taipumus muuttua lämpötilan muuttuessa. Lisäksi pinnoitusmateriaalit käyttäytyvät hystereesisesti, mikä voi jopa suunnata paritetun magneetin vuon pois anturista. Jotta nämä parasiittiset ominaisuudet eivät vaikuta järjestelmän toimintaan, pitää kuori sijoittaa tietyn etäisyyden päähän magneetista.
Tämä rajoittaa järjestelmäsuunnittelijan vapautta sijoittaa reitittää ja koteloida anturimoduulin komponentteja. Se myös tekee järjestelmä suuremman, painavamman, monimutkaisemman, vaikeamman kokoonpanna ja kalliimman.
Täysin erilainen lähestymistapa, joka ei kaipaa suojaamista, on parittaa sijaintianturi magneettiin, jolla on hyvin korkea remanenssi (jäännösmagnetismi BR) ja sijoittaa se anturin välittömään läheisyyteen. Tarkoitus on tehdä signaali-hajasäteilysuhteesta suotuisampi niin, että se vaikuttaa koko signaali-kohinasuhteeseen samalla tavoin.
Ikävä kyllä voimakkaat magneetit, kuten NdFeB- tai SmCo-tyyppiset, ovat noin kymmenen kertaa kalliimpia kuin kalvat kovaan ferriittiin perustuvat tai muoviin käärityt magneetit, mitkä estvät niiden käytön sijaintiantureissa useissa tapauksissa. Lisäksi tätä mahdollisuutta ei voida käyttää niissä monissa sovelluksissa, joissa magneettia ei voida sijoittaa anturipiirin lähelle.
Kaksipikselinen anturipiiri: sisäänrakennettu immuniteetti
Näitä kahta tapaa parempi lähestymistapa on tehdä anturi immuuniksi magneettiselle hajasäteilylle. Itse asiassa perustason matemaattisella operaatiolla voidaan poistaa hajasäteilykenttien tuottama kohina. Tietysti tämä edellyttää, että anturin laitteisto tukee tekniikkaa.
Lisäksi paritetun magneettiin sijoittaminen mahdollisimman lähelle anturipiiriä helpottaa aina lisäämään anturin hajasäteilyn sietoisuutta. Ainoa tapa saavuttaa hajasäteilyimmuniteetti on käyttää sijaintianturia, johon tämä toiminto on rakennettu sisään.
Keskeinen elementti magneettiselle hajasäteilylle immuunissa sijaintianturissa on kaksipikselinen magneettinen elementti (ks. kuva alla). Toisin kuin perinteinen 3D-magneettianturi, kaksipikselinen anturi käyttää yhden sijaan kahta pikselisolua määrittämään magneetin sijainnin. Tämä rakenne mahdollistaa differentiaalimittausten toteuttamisen.
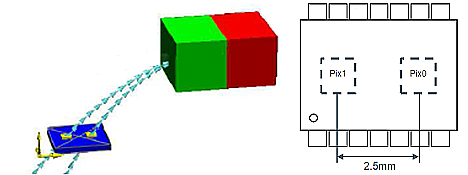
Kaksipikselisen AS54xx-anturipiirin rakenne.
Kumpikin pikseli voi mitata kaikki kolmea magneettikentän vektoria: Bx, By ha Bz. Ams:n AS54xx-sarjan piireissä nämä pikselisolut ovat 2,5 millin päästä toisistaan.
Jotta voisimme kuvata matemaattista operaatiota yksinkertaisesti, seuraava kuvaus anturin toiminnasta keskittyy lineaariseen sovellukseen (ks. kuva alla). Tässä piiri mittaa vain vektorit Bx ja Bz.
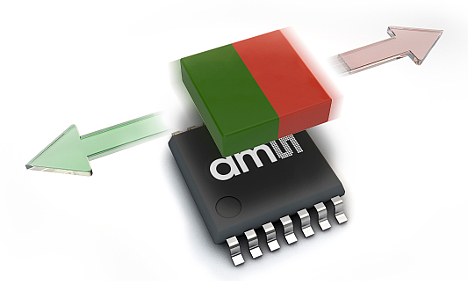
Lineaarisen liikkeen mittaaminen magneettisella sijaintianturilla ja kaksinapaisella magneetilla.
Anturipiiri mittaa seuraavat arvot määrittääkseen magneetin sijainnin:
Bx_Pix0...magneettikentän x-vektori, pikselin 0 mittaama
Bx_Pix1...magneettikentän x-vektori, pikselin 1 mittaama
Bz_Pix0...magneettikentän z-vektori, pikselin 0 mittaama
Bz_Pix1...magneettikentän z-vektori, pikselin 0 mittaama
Alla oleva kuva näyttää magneetin mittaustulokset -15 - +15 millin liikkuma-alalla. Magneetin sijainnissa 0 magneetti on täysin keskellä piirikoteloa. Tässä sijainnissa magneetin napojen pohjois-etelä-siirtymä on täsmälleen kahden pikselin välissä. Koska pikselit ovat 2,5 millin päässä toisistaan. Pix0- ja Pix1-käyrien välillä on 1,25 milli vaihesiirtymä.
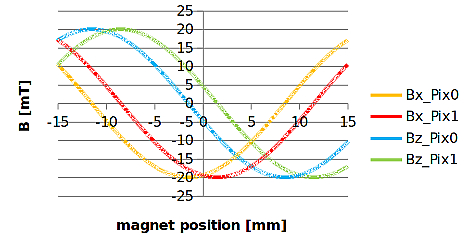
Kaksipikselisen anturipiirin mittaustulokset.
Näistä neljästä arvosta anturipiiri laskee kaksi differentiaalisignaalia, nimeltään Bi (x-vektorille) ja Bj (z-vektorille):
Bi = Bx_Pix0 – Bx_Pix1
Bj = Bz_Pix0 – Bz_Pix1
Kuvitelkaamme sitten hajasäteilykentän vaikuttamassa mitattavaan laitteeseen. Hajasäteilyn lähde on yleensä paljon kauempana anturipiiristä kuin sen paritettu magneetti. Tämä tarkoittaa, että suunnittelija voi olettaa saman hajasäteilyn vaikuttavan molempiin pikselisoluihin.
Tässä ovat sama Bi- ja Bj-kaavat, mutta niin että hajasäteily Bs vaikuttaa niihin:

On helppo nähdä, ettei Bs:n arvoilla ole vaikutusta Bi- ja Bj-arvoihin. Bs voidaan yksinkertaisesti eliminoida laskutoimisesta, millä saadaan tarkka sijaintimittaus ilman hajasäteilyn häiriötä. Tämä on sijaintimittauksen differentiaalisen määrityksen periaate. Magneetin sijainti voidaan laskea Bi- ja Bj-arvoista ATAN2-funktion avulla.
Hajasäteilyimmuniteetin demonstraatio
Kaksipikselisen magneettisen sijaintianturin ylivertainen suorituskyky differentiaalisella aistimisella on demonstroitu laboratoriossa. Alla kuvattava testi vertasi autossa käytetyn kaksipikselisen anturin sisältävän sijaintianturimoduulin mittaustuloksia toiseen moduuliin, jossa oli perinteinen yhden pikselin anturi. Moduulit mittasivat magneetin liikettä kaarella anturipiirin yläpuolella. Anturipiirin lähtöjännite muuttuu suhteessa sijainnin muutoksiin. Tämän kaltaista mittaamista tarvittaisiin tyypillisesti sovelluksessa, jossa mitataan esimerkiksi auton jarru-, kaasu- tai kytkinpolkimen liikettä.
Moduuleihin kohdistettiin hajasäteilyä Helmholtzin käämillä. Käämi oli konfiguroitu tuottamaan tiedetyn vahvuista hajasäteilyä vektoreilla Bx, By tai Bz. Moduulien lähtöjännite mitattiin oskilloskoopilla.
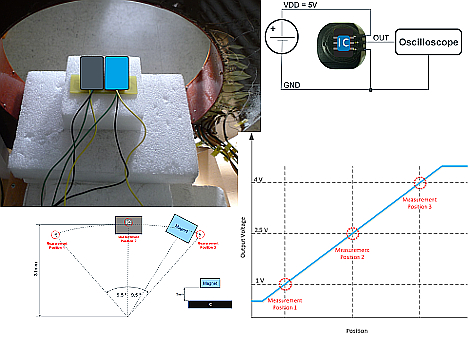
Kuvassa näkyvät molemmat moduulit Helmholtzin käämissä ylhäällä vasemmalla. Testijärjestely on kuvattu ylhäällä oikealla. Vasemmalla alhaalla kuvataan magneetin liikettä kaarella ja oikealla on esitetty moduulien tuotosten ominaisuudet.
Tulokset kertovat, että yksipikselisen anturipiirin virhe on yli 30 kertaa suurempi kuin kaksipikselisen anturin virhe, kun anturiin kohdistuu hajasäteily z-suunnassa.
Testin olosuhteet
Magneetin sijainti: 4V
Hajasäteilyn suunta: z
Hajasäteilyn taajuus: 50 Hz
Hajasäteilyn voimakkuus 2500 A/m
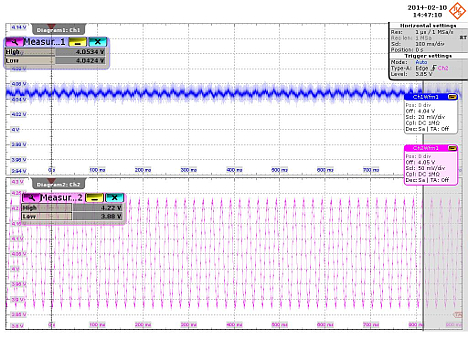
Lähtöjännitteet hajasäteilyn vaikutuksen alla. Kanava 1 näyttää kaksipikselisen anturin tulokset, kanava 2 yksipikselisen.
DC-hajasäteilykentät näyttävät halutun signaalin poikkeamana. AC-hajasäteily näyttäytyy kohinana, ja hajasäteilyn taajuus asettuu halutun signaalin yläpuolelle.
Kahden anturityypin välillä oli selvä ero. ±1 prosentin virhemarginaali on autoelektroniikassa tyypillinen vaatimus liikkeentunnistuksen sovelluksissa. Testissä mitattiin kaikki kohinan lähteet, myös hajasäteilyn lähde. Epälineaarisuus ja lämpötilamuutokset riippuvat sovelluksesta, joten niiden arvoja ei ole tähän kaavioon sisällytetty.
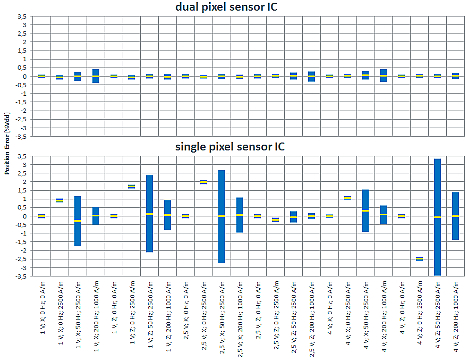
Virhemarginaalin vertailu kahden eri moduulin välillä, kun ne on altistettu AC- ja DC-hajasäteilyn vaikutuksille. Kohina näkyy kuvassa sinisenä.
Kaksipikseliset tuotteet markkinoilla
Differentiaalisen aistimisen kahden magneettielementin menetelmää käytetään ams:n kaikissa AS54xx-sarjan autoelektroniikkaan kvalifioiduisa sijaintiantureissa. Niitä voi käyttää -40 - +150 asteen lämpötila-alueella ilman kompensaatiota. Piirit ovat äärimmäisen herkkiä ja niitä voidaan ajaa laajalla syöttöalueella 5 milliteslasta sataan milliteslaan. Koska piirit sietävät hyvin hajasäteilyä, niiden kanssa voidaan käyttää pieniä ja edullisia magneetteja.
Luotettava toiminta hajasäteilyn vaikuttaessa auttaa autoelektroniikan järjestelmien suunnittelijoita vastaamaan ISO26262-standardin vaatimuksiin. AS54xx-sarjan piireillä on integroitu muitakin turvatoimintoja, kuten itsemonitorointi. Turvakerros suojaa piiriä myös maadoituksen tai virransyötön pettäessä, sekä yli- ja alijännitetilanteissa. Edistyneempiin turvatoimintoihin kuuluu esimerkiksi EEPROM-muistin testi, jolla bittivirheet havaitaan.
Kaksipikselinen differentiaalinen toimintaperiaate tekee järjestelmällä hajasäteilylle immuunin, mutta lisäksi se eliminoi tarpeen säätää piiriä lämpötilan tai ajan yli. 14 bitin resoluutiolla nämä sijaintianturit ovat hyvin tarkkoja, joten ne sopivat laajaan valikoimaan sovelluksia.
Lopuksi
Autojen elektroniikassa hajasäteilystä tulee yhä tärkeämpi tekijä magneettiantureille, kun voimalinjasta tulee osittain tai kokonaan sähköinen. Uudet standardit kuten ISO11452-8 lisäävä haasteita entisestään.
Tässä sähkömagneettisesti ja mekaanisesti ankarassa ympäristössä kaksipikselinen 3D-anturipiiri antaa suunnittelijoille mahdollisuuden kehittää kestäviä ja suorituskykyisiä ratkaisuja jotka vastaavat vaativimpiinkin turvastandardeihin ilman, että piirejä pitäisi suojata monimutkaisilla ja kalliilla koteloratkaisuilla.
 Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.
Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.


















