











Kehittyneet kuljettajan apuvälineet (ADAS, Advanced Driver Assistance Systems) lisäävät autolla ajamisen turvallisuutta, mutta joissakin tapauksessa ne saavat auton ajamaan itsestään. Tätä laki ei salli, joten autojen pitää tunnistaa, milloin kuljettajan kädet ovat ratilla. Tähän avuksi on tulossa älypuhelinten kosketusnäytöiltä tuttu kapasitiivinen aistiminen.
| Artikkelin kirjoittaja Gernot Hehn on valmistunut Grazin teknisestä korkeakoulusta vuonna 2010. Hän työskentelee ams AG:llä edistyneiden prototyyppien ja demokorttien kehittäjänä eri anturituotteille, mukaan lukien kapasitiiviset ja induktiiviset anturit. |
Autot ovat ihmeellisen turvallisia koneita. Niiden turvalliselle toiminnalle suurimman riskin aiheuttaa inhimillinen, ei mekaaninen elementti, eli kuljettaja. Yhdysvaltain viranomaisten mukaan 94 prosenttia onnettomuuksista aiheuttajaa ajoneuvon kuljettaja. Tämän takia autoteollisuus on esitellyt joukon erittäin hienostuneita toimintoja termin ADAS (Advanced Driver Assistance Systems) estääkseen kuljettajia tekemästä joitakin niistä vaarallisista virheistä, joihin he ovat taipuvaisia. Alkaen älykkäästä ohjauksesta ja elektronisista vakausjärjestelmistä ADAS-toiminnot ovat laajentuneet käsittämään kaistavaroituksia ja aktiivisia hätäjarrutuksia.
Autonvalmistajien tähtäimessä siintää tietenkin lopulta itseään ajava robottiauto. Mutta sitä odotellessa ADAS-yksiköiden täytyy antaa kuljettajalla kyky kontrolloida ja ohittaa automaatiotekniikka. Teoriassa kaistavahdilla ja älykkäällä vakionopeudensäätimellä varustettu auto toimii jo tietyissä tilanteissa robottiauton tapaan, esimerkiksi kun moottoritiellä kuljetaan pitkään yhteen suuntaan.
Jokainen kätensä ratista nyt irrottava kuski rikkoo tällä hetkellä lakia. Wienin vuonna 1968 päätetyn liikennesopimuksen 8. artiklan mukaan valtaosassa Eurooppaa täytyy joka autossa tai ajoneuvoyhdistelmässä olla kuljettaja ja lisäksi jokaisen kuljettajan täytyy kaiken aikaa hallita ajoneuvonsa.
Autonvalmistajien ADAS-järjestelmien täytyy tämän takia pystyä päättelemään, hallitseeko kuljettaja ajoneuvoa. Yksi parhaimpia menetelmiä tämän toteamiseksi on tarkistaa, piteleekö kuljettaja kiinni ohjauspyörästä. Auton täytyy tietää, irrottaako kuljettaja kätensä ratista.
Tätä on yritetty toteuttaa erilaisin keinoin: mekaanisella, resistiivisellä ja kapasitiivisella aistimisella. Näyttää siltä, että kapasitiivinen menetelmä on paras yhdistelmä käyttömukavuutta ja miellyttävyyttä. Kuten tämä artikkeli osoittaa, perinteiset mikro-ohjainpohjaiset kapasitiivisen aistimisen tekniikat, joita löytyy älypuhelimesta ja monista kotitalouslaitteista, eivät sovi autojen järjestelmien vaatimuksiin kovin hyvin.
Uusi, tässä artikkelissa kuvattu analoginen kapasitiivinen aistiminen välttää digitaalisiin kapasitiivisiin antureihin liittyvät ongelmat, mutta tuo luotettavan tunnistamisen kaikissa toimintaolosuhteissa.
Mekaanisen ja resistiivisen aistimisen puutteet
Käsien irrottamisen ratista voi aistia mekaanisesti sähköisen ohjaustehostimen eli EPS-komponenttien avulla. Sähkömoottoria, jonka päätehtävä on vahvistaa kuljettajan rattiin kohdistamaa kääntövoimaa, voidaan käyttää myös tuottamaan korkeataajuinen alhaisen amplitudin häiriösignaali ratissa. Tämä häiriö on liian heikko muuttaakseen auton kulkusuuntaa, mutta riittävän voimakas jotta se voidaan havaita ohjauskulman anturilla. Kun kuljettajan kädet ovat ratilla, ne vaimentavat ratin nytkähdystä. Häiriösignaalin vahvistuminen kuljettajan käsien takia voidaan luotettavasti havaita anturilla.
Vaikka tällainen järjestelmä on suhteellisen helppo toteuttaa minimaalisilla muutoksilla nykyisiin EPS-järjestelmiin – kunhan moottori ja anturi kykenevät tuottamaan ja tunnistamaan näin korkeataajuisia liikkeitä – on vaikea saada häiriösignaali riittävän voimakkaaksi ilman että se häiritsisi kuljettajaa. Käytännössä ratin liike näyttää aina tuntuvan kuljettajasta pienenä nytkähdyksenä, mikä on sekä häiritsevää että epämiellyttävää.
Resistiivinen järjestelmä ei tarvitse mekaanista häiriötä. Resistiivisen rattianturin rakentaminen vastaa resistiivisen kosketusnäytön rakentamista. Rakenne koostuu kahdesta johtavasta kalvosta, joiden välissä on vastustava erotin. Se sijoitetaan ratin kuorimateriaalin sisään. Tuotantolinjan lopulla kalibroidaan järjestelmän paine ilman kosketusta. Järjestelmän pitäisi tämän jälkeen aisti, milloin käden normaali paine kohdistuu rattiin. Jos rakenne on jaettu osiin, se voi aistia jopa kuljettajan käsien sijainnin ohjauspyörällä.
Valmistajan kannalta tämän menetelmän ikävä puoli on se, että ratin valmistusprosessi muuttuu. Anturimateriaali täytyy kiilata valetun alumiinikehyksen ja pinnoituksen väliin.
Suurempi merkitys on sillä, että kuljettajat eivät ehkä halua hyväksyä vaatimusta pitää ratista kiinni tietyllä minimivoimalla. Kuluttajat rakastavat kosketusnäytöllisiä älypuhelimiaan, jotka tarvitsevat vain kevyen kosketuksen aktualisoidakseen virtuaalisen napin tai kytkimen. Vaatimus painaa koko ajan on vanhanaikainen. Kuljettajat tuntuvat pitävän enemmän konseptista, jossa kosketus riittää havaitsemiseen.
Tämän mahdollistaa kapasitiivinen anturi, joka aistii sekä absoluuttisen kapasitanssin että muutoksen kapasitanssissa, kun toinen käsi koskettaa rattia. Mitään painetta tai puristusta ei tarvita.
Kapasitiivinen anturi koostuu johtavasta elektrodista, joka on sijoitettu ratin pintamateriaalin alle ja ajuri/ohjauspiiristä, joka tunnistaa muutokset elektrodin sähköisessä toiminnassa – mikä kertoo järjestelmälle kapasitanssin muutoksesta. Elektrodi voidaan valmistaa kuparikalvosta tai langasta, joka on liitetty taustamateriaaliin. Vaihtoehtoisesti joissakin luksusautojen rateissa on lämmityselementti, jota voidaan käyttää anturin elektrodina. Molemmissa tapauksessa laitetoteutus on yksinkertainen ja kuljettajan kokemus anturista luonnollinen ja miellyttävä.
Lisäksi järjestelmäsuunnittelijat ymmärtävät hyvin kapasitiivisen aistimisen toiminnan. Kosketusnäytöllisten älypuhelimien menestys on saanut komponenttivalmistajia kehittämään laajan valikoiman erilaisia kapasitiivisia kosketusohjaimia markkinoille.
Mikä sitten estää autonvalmistajia toteuttamasta kapasitiivista kosketusta rattiin käyttämällä näitä olemassaolevia ohjainpiirejä? Vastaus pitää sisällään kolme asiaa: EMC, lämpötila ja kosteus.
Rattia kiertävä elektrodi toimii kookkaana ja tehokkaana antennina, joka pystyy skeä lähettämään että vastaanottamaan häiriötä. Valitettavasti tämän päivän kosketusnäyttöjen ohjaimet edellyttäävt korkeataajuiden digitaalisen signaalin yhdistämistä antuirn elektrodiin. Tällainen signaali luo potentiaalisesti ongelmallisia häiriöitä, kun niitä lähetetään ratista ajoneuvon sisälle.
Ratin anturin täytyy myös kestää muutokset lämpötilassa. Ratin päällystemateriaalilla on tietty eristevakio huoneenlämpötilassa, joka asettaa perustan elektrodin aistimalle kapasitanssille. Tämä eristevakio riippuu kuitenkin lämpötilasta, ja järjestelmän pitää pystyä toimimaan autojen laajalla toiminta-alueella eli -40 asteesta aina +125 asteeseen.
Edelleen, ajoneuvon sisätilat ovat elävä ympäristö, jossa ihmisille sattuu vahinkoja. Lattekahvi voi kaatua ratille ajaessa. Kapasitiivisen anturin pitää siksi pystyä toimimaan oikein, vaikka ratti olisi läpimärkä.
Kännyköiden kosketusohjaimet toimivat jo aivan hyvin, vaikka näytöllä olisi vähän vesipisaroita, mutta ne pettävät kun koko pinta on nesteen peitossa.
Näiden syiden takia mikro-ohjainpohjaiset kosketusnäytöillä ja muissa kodin laitteissa käytettävät ratkaisut eivät sovi hyvin autosovelluksiin. On kuitenkin olemassa uusi kapasitiivisen aistimisen analoginen toteutus, joka tarjoaa ratkaisun yllä esitettyihin digitaalisia ohjaimia vaivaaviin ongelmiin.
Monimutkaisen impedanssin hyödyntäminen
Uuden analogisen ratkaisun tarjoaa ams:n Capsic-niminen ohjainperhe (ks. kuva 1). Koska se aistii monimutkaista impedanssia ratin elektrodissa, se suoriutuu menestyksellä vaihtelevista olosuhteista, kuten muuttuvasta lämpötilasta ja jopa kastumisesta kokonaan.
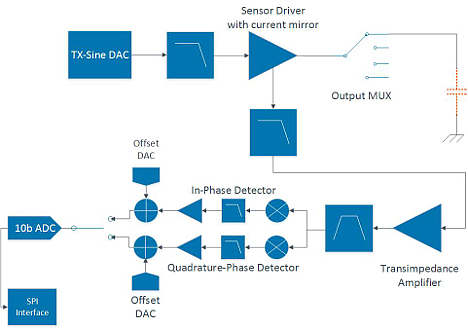
Kuva 1. ams:n Kapasitiivisen Capsic-anturin lohkokaavio.
Capsic-anturi toimii syöttämällä elektrodiin ohjaussignaalin, joka on tuotettu sisäisellä matalataajuisella siniaaltogeneraattorilla ja vahvistimella. Ohjaussignaalin jännitettä ja taajuutta kontrolloidaan huolellisesti, jotta varmistetaan se, että signaalin virta on suhteessa ohjaimen Sense-nastassa aistittuun monimutkaiseen impedanssiin. Ajurivirta voidaan esittää kaavana:
Kuten kaavasta näkyy, virralla on todellinen ja kuvitteellinen komponentti. Tämä voidaan ilmaista virran kahtena komponenttina: toinen on samanvaiheinen ajurin jännitteeseen nähden, toisen komponentin vaihe-ero on 90 astetta. Yleinen tapa esittää tämä on vaihekaavio (ks. kuva 2). Kokonaisvirta koostuu näiden kahden komponentin yhdistelmästä. Perinteinen piiriratkaisu mittaa vain kokonaisvirtaa, ei sen kahta komponenttia.
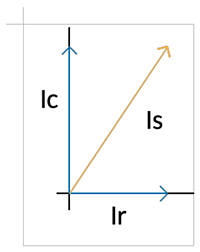
Kuva 2. Vaihekaavio näyttää Capsic-anturin ajurivirran kaksi komponenttia.
Capsic-anturin sisällä monimutkainen ajurivirta demoduloidaan kahtena polkuna, joista toinen on samanvaiheinen ajurivirran kanssa ja toisen vaihe-ero on 90 astetta. Näiden demodulaattoreiden tulos tuottaa resistanssin ja kapasitanssin arvon anturielektrodissa.
Tämä kyky erottaa resistanssi ja kapasitanssi mahdollistaa sen, että järjestelmä toimii luotettavasti ratin kapasitanssia mitatessaan. Miksi näin on?
Ennen kuin kuljettaja koskettaa rattia, anturi aistii tietyn impedanssin. Tämä liittyy hajakapasitanssiin, eli rattia ympäröivään kotelomateriaalin kapasitanssiin ja auton sisätilan ilmaan, ja osin myös johtumisesta auton runkoon (kosteuden takia). Ratin tila koskemattomana on kuvattu kuvassa 3.
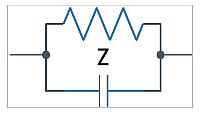
Kuva 3. Ratin anturin yksinkertaistettu piirikuvaus.
Ratti on tässä vaiheessa itse asiassa resistori ja rinnan yksinkertaiseimman kondensaattorin eli levykondensaattorin kanssa, joka voidaan ilmaista kaavalla:
missä ε on eristevakio, A on ala ja d on etäisyys elektrodista.
Koska käden eristevakio on noin 60 kertaa korkeampi kuin ilman, ratin aistima kapasitanssi muuttuu merkittävästi heti, kun kuljettaja koskettaa rattia. Tämän muutoksen kapasitanssissa Capsic-anturi havaitsee välittömästi.
Mutta mitä tapahtuu, jos ratti kastuu? Tämä vaikuttaa sekä järjestelmän kapasitanssiin että resistanssiin, kun käsi vaikuttaa vain resistanssiin. Tämä tarkoittaa, että laitevalmistaja voi kirjoittaa ohjelmiston, joka hylkää – vääränä kosketuksena – minkä tahansa muutoksen kapasitanssissa, jonka yhteydessä esiintyy samanaikainen muutos resistanssissa. Sama periaate pätee muutoksiin kapasitanssissa lämpötilamuutosten yhteydessä.
Kuva 4. ams:n kapasitiivisen Capsic-anturin evaluointikortti.
Tämä osoittaa selvästi arvon, joka tulee Capsic-piirin kyvystä aistia monimutkaisen impedanssin molemmat osiot erikseen. Tätä kyvykkyyttä ei saa perinteisillä mikro-ohjainpohjaisilla kapasitiivisilla ohjaimilla, jotka pystyvät mittaamaan vain muutosta kokonaisjohtavuudessa. Samaan aikaan Capsic-ohjaimen harmiton, matalataajuinen siniaaltoajurisignaali generoi häviävän pienen määrän EMI-säteilyä, kun se on kytketty rattia kiertävään kookkaaseen elektrodiin.
Capsic-ohjain, jossa on mihin tahansa 8-bittiseen mikro-ohjaimeen liittyvä sarjaliitäntä, on helppo istuttaa rattiin. Sen avulla on mahdollista erittäin luotettavasti tunnistaa, ovatko kuljettajan kädet ratilla vai eivät. Tekniikka ei haittaa kuljettajaa, mutta se tuo vuonna 1968 laaditun Wienin sopimuksen vaatiman turvatoiminnallisuuden autoihin.
 Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.
Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.


















