











Energiatehokkuuden tiukentuneet vaatimukset vaikuttavat vahvasti sähkömoottorien käyttöön eri sovelluksissa. Ohjauselektroniikan halpeneminen on tehnyt harjattomasta DC-moottorista kuluttajalaitteiden valtiaan.
| Artikkelin kirjoittaja Erlendur Kristjansson johtaa tuotemarkkinointia Microchip Technologyn 16-bittisten MCU-ohjainten divisioonassa. |
Teollisuussovelluksissa perinteisen AC-induktiomoottorin kommutointi hoidetaan nykyään elektronisesti. Lisäksi monissa teollisuuskohteissa suosiotaan ovat kasvattaneet uudet SRM- ja SyncRM-moottorit.
Mahdollisimman korkeaa hyötysuhdetta pidetään kaikkien sähkömoottorisovellusten Graalin maljana. Kun tarkastellaan sähkömoottorien nykyisiä sovelluksia, havaitaan jatkuva suuntaus kohti yhä korkeampaa energiatehokkuutta ja edullisempaa hintaa. Esimerkiksi ajoneuvoissa alkuperäinen lähestymistapa moottoritilan pumppujen ja puhaltimien ohjaamiseen perustui kiilahihnojen käyttöön. Vaikka se onkin kätevä tapa toteuttaa toimilaitteiden käyttö hyödyntämällä auton moottorin pyörimisliikettä, menettelyn hyötysuhde jää vaatimattomaksi. Pyörittämällä auton toimilaitteita erillisillä sähkömoottoreilla voidaan merkittävästi parantaa niiden ohjauksen joustavuutta ja hyötysuhdetta.
Toinen hyvä esimerkki on pesukone, jonka ensisijainen voimakone on alun perin ollut vaihtovirralla toimiva induktiomoottori. Jatkuvasti kasvaneet vaatimukset yhä paremmasta energiatehokkuudesta ja vettä säästävien pesujaksojen joustavista ohjausmahdollisuuksista ovat kuitenkin nostaneet kestomagneetteihin perustuvan synkronimoottorin hallitsevaksi voimakoneeksi uusimmissa laitteissa.
Tämä suuntaus on tietysti ollut vahvasti riippuvainen inverttereihin ja ohjaimiin tarvittavien puolijohdekomponenttien edistysaskelista. Aiemmin moottorikäyttöön tarvittavan elektronisen kommutoinnin kustannukset ovat olleet merkittävä tekijä, joka on rajoittanut synkronimoottorien käyttöä monissa sovelluksissa. Viime aikoina kustannukset ovat kuitenkin alentuneet merkittävästi, minkä ansiosta synkronimoottoreista on tullut tavanomaisia lukuisissa eri sovelluksissa.
Moottorivaihtoehdot
Korkeaa hyötysuhdetta ja dynaamisia ohjausominaisuuksia vaativiin sovelluksiin harkitaan nykyään ensisijaisesti kuutta eri moottorityyppiä:
AC-induktiomoottori (ACIM)
Harjaton DC-moottori (BLDC)
Pintamagneetein varustettu synkronimoottori (PMSM tai SPM)
Upotetuin magneetein varustettu synkronimoottori (IPMSM tai IPM)
Kytkinreluktanssimoottori (SRM)
Synkroninen reluktanssimoottori (SyncRM)
Hyötysuhteeltaan eri moottorityypit voidaan asettaa paremmuusjärjestykseen: IPMSM, PMSM, BLDC, SynchRM, SRM ja ACIM. Sama järjestys pätee myös eri moottorityyppien teho/vääntösuhteen vertailuarvoihin.
AC-induktiomoottori eli ACIM on teollisten sovellusten työjuhta ja myös yleisin moottorityyppi suuritehoisissa (> 1 kW) kohteissa. Entistä kovempien hyötysuhdevaatimusten yleistyessä moniin ACIM-kohteisiin tehdään kuitenkin päivityksiä muuttamalla moottorin kommutointiohjaus elektroniseksi energiatehokkuuden parantamiseksi. Kohteissa, joissa vaaditaan dynaamisempaa ohjausta, on järkevämpää sen sijaan käyttää PMSM-moottoria. Joissakin sovelluskohteissa, joissa kustannukset sekä massa/vääntösuhteen ja rakennelujuuden kaltaiset tekijät ovat kriittisiä, käytetään taas usein SRM-tyyppistä moottoria. Toinen klassinen AC-induktiomoottorin teollinen sovellusalue on ollut suuritehoisten kompressorien käyttö. Niissä SyncRM-moottorit ovat alkaneet viime aikoina yleistyä, sillä niiden rakenne on hyvin samankaltainen kuin ACIM-koneiden. Staattori voi olla samanlainen ja vain roottori erilainen. Synkronisen reluktanssimoottorin avulla voidaan kuitenkin samassa koossa päästä parempaan vääntöön ja hyötysuhteeseen tai vaihtoehtoisesti pienempään kokoon samoilla suoritusarvoilla.
On myös sellaisia sovelluskohteita, joissa ei aiemmin ole käytetty minkäänlaisia sähkömoottoreita. Näitä ovat esimerkiksi apulaitteet auton konepellin alla. Näissä kohteissa sähkömoottoreita on viime aikoina alettu käyttää korvaamaan toimilaitteiden mekaanisia hihnaohjauksia. Hyötysuhdetta voidaan näin merkittävästi parantaa, sillä kunkin sähkömoottorin kuormitustarve voi merkittävästi vaihdella ajoittain, kun taas mekaaninen kiilahihna pyörii jatkuvasti myös silloin, kun kyseistä toimilaitetta ei tarvita. Nykyään kaikella on merkitystä, mitä tulee ajoneuvon hyötysuhteeseen ja polttoainetalouteen. Näissä kohteissa kehitys on edennyt ensin hihnavedosta BLDC-moottoreihin ja edelleen PMSM-moottoreihin. Merkittäviä ajoneuvosovelluksia, joissa hyödynnetään sähkömoottoreita, ovat myös DbW-järjestelmät (Drive by Wire). Niissä käytetään esimerkiksi SRM-moottoreita ohjaamaan jarrujen hydrauliikkapumppuja. SRM-moottorin kyky erittäin nopeaan toimintaan antaa mahdollisuuden kasvattaa jarrujärjestelmän painetta hyvin nopeasti, mikä tarjoaa ajoneuvon jarruille nopean toimintavasteen.

Kuva 1. Sähkömoottoreilla voidaan parantaa ajoneuvojen polttoainetaloutta.
Elektronisesti kommutoiduilla sähkömoottoreilla on ollut vahva vaikutus myös akkukäyttöisiin työkaluihin ja muihin apuvälineisiin. Akkutekniikoissa tapahtuneiden edistysaskelten ja erityisesti litiumioniakkujen kehityksen ansiosta voimme nykyään käyttää esimerkiksi johdottomia pölynimureita ja sähkötyökaluja, jotka hyödyntävät BLDC-moottorien hyvää suorituskykyä. Alun perin näissä sovelluksissa käytettiin enimmäkseen harjallisia DC-moottoreita, mutta niiden nopeus- ja vääntöominaisuudet ovat melko rajalliset. BLDC-moottorien merkittävästi parempi teho/vääntösuhde mahdollistaa kohtalaisen kevyet, pitkäikäiset ja suorituskykyiset laitteet, jotka akkukäyttöisinä yltävät ominaisuuksiltaan lähelle vastaavia johdollisia versioita.
Kodinkoneissa kuten pesukoneissa, jääkaapeissa, astianpesukoneissa ja ilmastointilaitteissa ensisijainen työjuhta on aiemmin ollut teollisuussovellusten tapaan AC-induktiomoottori. Tällä vuosituhannella harjattomat synkronimoottorit, erityisesti BLDC- ja PMSM-moottorit, ovat kuitenkin tulleet yhä tärkeämmiksi. Tärkein syy tähän liittyy valtionhallinnon asettamiin entistä tiukempiin vaatimuksiin laitteiden energiatehokkuudesta. Ongelmana siirtymisessä pois ACIM-tekniikoista on kuluttajalaitteissa aina ollut hinta, ja tämä koskee sekä moottoria että sen ohjauspiirejä. Onneksi molemmissa hintataso on vuosien saatossa tullut merkittävästi alemmas, minkä ansiosta suurimmassa osassa uusista laitteista voidaan soveltaa entistä energiatehokkaampia tekniikoita.
Ohjaustekniikat
Kuten aiemmin mainittiin, ohjainpiiri on tärkeä osa, kun käytetään elektronisesti kommutoituja moottoreita. Tai itse asiassa se on pakollinen, sillä ilman ohjainta ei tapahdu mitään. Lähes kaikilla moottoreilla, joita tässä käsitellään, ohjainpiiri on rakenteeltaan hyvin samankaltainen (kuva 2a). Ainoa poikkeus on SRM-moottori (kuva 2b). Suurin ero moottorityyppien välillä on niiden ohjauksessa eli siinä, miten ohjaussignaali muodostetaan kuvan 2 piireille. Tämä riippuu kunkin moottorin rakenteesta, jonka vuoksi niiden sähkömagneettinen käyttäytyminen poikkeaa toisistaan. Tämä on otettava huomioon, kun muodostetaan jännite- ja virtamuotoja kutakin moottoria varten, jotta toiminta olisi optimaalista ja mahdollisimman energiatehokasta.
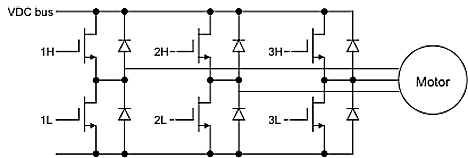
Kuva 2a. Synkronimoottorin ohjainpiiri.
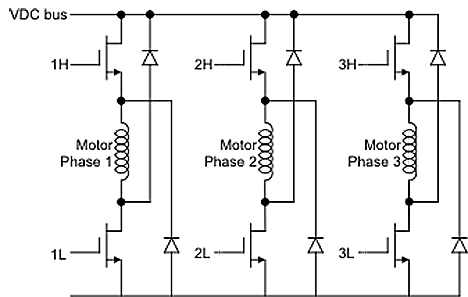
Kuva 2b. SRM-moottorin ohjainpiiri.
Elektroniseen kommutointiin siirtymisen alkuaikoina monet sovelluskohteet olivat hyvin kustannusherkkiä. Tämän vuoksi niihin valittiin yleensä BLDC-moottori, koska sitä voitiin ohjata 8-bittisellä mikro-ohjaimella käyttäen kommutointiin yksinkertaista puolisuunnikkaan muotoista trapetsiaaltoa. Silti kustannukset nousivat joissakin tapauksissa liian korkeiksi.
Noin 15 vuodessa erittäin suorituskykyisten digitaalisten signaaliohjaimien ja mikro-ohjaimien hinnat kuitenkin ovat alentuneet riittävästi, joten kustannusherkissä sovelluskohteissakin on voitu hyödyntää myös edistyneempiä ohjausalgoritmeja kuten anturitonta FOC-ohjausta (Field Oriented Control). Tämä mahdollisuus korostuu esimerkiksi kodin lämmitysjärjestelmään kuuluvissa kiertovesipumpuissa ja ajoneuvojen tuulettimissa (kuva 3).
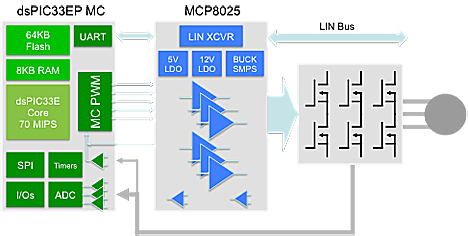
Kuva 3. Ajonevon tuulettimen toteutus.
Mitä nämä uudet hienot ohjausalgoritmit sitten tarjoavat? Miksi perinteinen trapetsiaallolla ohjattu BLDC-moottori ei riitä?
Energiatehokkuus
Yhä energiatehokkaammista moottoreista ja ohjaimista puhutaan paljon, mutta lopulta koko järjestelmän hyötysuhde ratkaisee. Esimerkiksi aiemmin mainittiin auton moottoritilan toimilaitteiden kiilahihnat. Hihnavedon hyötysuhde on sinänsä hyvä, jopa yli 90 prosenttia, mutta se ei kykene lopettamaan toimintaansa silloin, kun kyseistä toimilaitetta ei tarvita. Sen sijaan hihnaveto jatkaa toimintaansa joutilaana, mikä tuottaa suuria häviöitä koko järjestelmän kannalta. Sähkömekaanisilla järjestelmillä puolestaan on muunlaisia häviöitä kuten taipumus värähtelyyn. Se saattaa johtua vääntömomentin aaltoisuudesta, joka taas on BLDC- ja SRM-moottorien toimintaperiaatteen tuottama sivuilmiö. Sovelluksen tarpeista riippuen järjestelmän energiatehokkuutta voidaan edelleen parantaa, jos moottori saadaan toimimaan pehmeästi ilman värähtelyjä. Tämä voidaan saavuttaa käyttämällä FOC-algoritmia tai vastaavaa vektorisäätöä.
Tärkeä tekijä on myös kuorma, jota moottori pyörittää. Kaikille moottoreille voidaan laatia kuormituksen hyötysuhdekäyrä, joka näyttää samankaltaiselta kuin kuvassa 4 (myös ohjain mukana). Kuten kuvasta nähdään, käyrässä on huippukohta nimellisvääntömomentin kohdalla, mutta useimmilla sovelluksilla ei ole vain yhtä kiinteää kuormitustilaa. Joissakin tapauksissa moottorin tulee toimia koko toiminta-alueen leveydellä. Hyvä esimerkki tästä on ilmastointilaitteen kompressori. Sen kuormitus vaihtelee riippuen siitä, kuinka paljon järjestelmän tulee jäähdyttää tai lämmittää läpi kulkevaa ilmaa, jopa jokaisen mäntäsyklin aikana. Koska kompressorit käyvät miltei jatkuvasti, IPM-moottorien käyttö on yleistynyt, sillä niillä on kaikkein paras hyötysuhde. Mutta kun tarkastellaan IPM-moottorin hyötysuhdekäyrää ja verrataan sitä SyncRM-moottorin vastaavaan käyrään (kuva 4), nähdään, että SyncRM-käyrä on laakeampi, vaikka IPM-moottorilla onkin parempi hyötysuhde nimelliskuormalla. Toisin sanoen SyncRM-moottorin energiatehokkuus säilyy paremmin kevyellä kuormituksella, minkä ansiosta sovelluksen kokonaishyötysuhde on lähellä samaa tasoa kuin IPM-moottorilla.
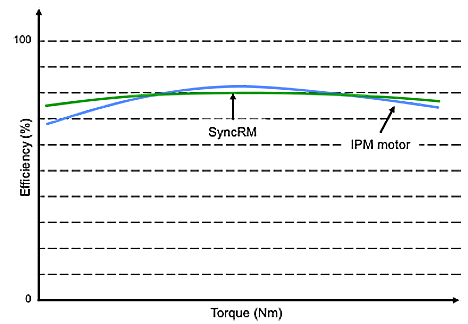
Kuva 4. Kuorma/hyötysuhde-käyrät (moottori ja ohjain).
Harkintaa valintoihin
Kun sähkömoottoriin perustuvia järjestelmiä suunnitellaan, on hyvä muistaa, että koko järjestelmän hyötysuhde koostuu useista osista, joihin kaikkiin on syytä kiinnittää huomiota. Energiatehokkuuden maksimoinnin tulee kuitenkin olla taloudellisesti mielekästä. Tämän saavuttamiseksi tarjolla on sovelluksesta riippuen lukuisa joukko erityyppisiä moottoreita ja ohjausalgoritmeja, joista voi valita. Yksikään moottoritekniikka ei ole ylivoimainen kaikissa kohteissa, ja tästä syystä järjestelmän suunnittelijan on ymmärrettävä kunkin tarjolla olevan tekniikan edut ja haitat, jotta kyseisen kohteen tarpeisiin tulisi valituksi parhaiten soveltuva kokoonpano.
 Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.
Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.


















