











SIMO-arkkitehtuuriin perustuva tehonhallinta auttaa kutistamaan älykellon vaatiman tehonsyötön pienempään tilaan paremmalla hyötysuhteella. Sen ansiosta Maximin MAX77654-tehonhallintapiiri tuottaa enemmän tehoa pienemmässä koossa, mikä pidentää kellon toiminta-aikaa ja mahdollistaa pienemmän laitetoteutuksen.
Älykellojen markkinoiden kasvu jatkuu lukemattomien uusien ominaisuuksien ja sovellusten ansiosta. Henkilökohtaiset terveys- ja kuntoilutuotteet sisältävät uusia ominaisuuksia, kuten seurannan, hälytykset ja verkkoyhteydet. Älykellolla ohjattujen autojen kasvua vauhdittavat hätätilanneapu ja auton tilapäivitykset. Veden- ja iskunkestävyys ja kirkkaammat näytöt ohjaavat markkinoiden kasvua maailmanlaajuisesti. Teräväpiirtokamerat, GPS-vastaanottimet, pienet tehokkaat kaiuttimet, suuret tallennustilat ja muut uudet ominaisuudet ovat tulollaan.
Yhä pienempien laitekokojen vaatimus kuitenkin lisää elektroniikan pienentämisen haastetta ja tuo lisää ongelmia akun toiminta-ajan pidentämiseen. Tässä seuraava suunnitteluratkaisu esittelee innovatiivisen virranhallintajärjestelmän, joka tuottaa tehoa paremmalla hyötysuhteella hyvin pienessä tilassa ja mahdollistaa pidemmän paristojen toiminta-ajan pienille puettaville laitteille.
OHJELMOITAVA SIMOã´ TULEE APUUN
Ihannetapauksessa tehokas ratkaisu vie vain vähän tilaa ja integroi akkulaturin ja tarvittavat virransäädöt yhdelle ja samalla älykellon piirille. SIMO eli yhden induktorin monilähtöinen buck-boost -tyyppinen eli jännitettä laskeva ja nostava hakkuripiiri (single-inductor multiple-output) toteuttaa kolme kytkentäregulaattoria yhdellä induktorilla. Jokaisen regulaattorin topologia on ohjelmoitavissa. Akun jännitealueella ja sen yläpuolella olevilla jännitteillä piiri tarjoaa buck-boost -toimintoja ja akun jännitteiden alapuolella buck-toimintoja – mikä on luonnostaan tehokkaampaa kuin buck-boost. Lopuksi korkeataajuinen käyttö sallii pienen induktorin käytön, mikä edelleen kutistaa tarvittavaa tilaa. Kahta sirulla olevaa LDO-regulaattoria käytetään kohinaherkille kuormille tai kuormien kytkentään.
SIMO-TEHOPUU
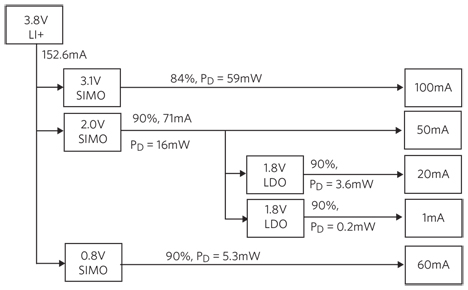
Alla oleva kuva esittää järjestelmän tehopuuta. Siinä näkyy jokaisen säätimen lähtöjännite, kuormitusvirta, hyötysuhde ja tehohäviö (PD). Kolme viidestä kuormasta syötetään suoraan korkean hyötysuhteen SIMO-muuntimella. Myös neljännen ja viidennen kuorman LDO-regulaattoreita syötetään SIMOlla, millä päästään 90 prosentin hyötysuhteeseen alhaisen dropout-jännitteen (2-1,8 V) ansiosta. Järjestelmän kokonaishyötysuhde on erinomainen 86,2 prosenttia.
SIMO-MUUNNIN
Kuvassa 3 on SIMO-muuntimen lohkokaavio (induktoria lukuun ottamatta kuva esittää kaikki komponentit). Kytkentä-regulaattorit tuottavat tehoa pienimmillä häviöillä, ja älykäs arkkitehtuuri eliminoi tarpeen lisätä yksi induktori kutakin regulaattoria varten.
INDUKTORIN VIRRAN JAKAMINEN
Tässä hystereettisessä DCM-regulaattorissa (discontinuous current mode) induktori on jaettavissa, koska induktorivirta menee aina 0:aan.
Buck-boost-tilassa induktori rakentaa virran M1:n ja M4:n ollessa päällä VIN / L -nopeudella. Kun se saavuttaa ohjelmoidun rajan, virta syötetään valittuun SBBx-lähtöön M2- ja M3_x-transistoreiden kautta, kuten kuvassa 5 on esitetty.
Jännitettä laskevassa Buck-tilassa M1 ja M3_x kytkeytyvät päälle, ja virtaa syötetään lähtöön samalla kun virtaa kasvatetaan induktoriin nopeudella (VIN - VSBBx) / L. Kun induktorivirta saavuttaa ohjelmoidun rajan, induktorista tuleva energia syötetään lähtöön käynnistämällä M2 ja sammuttamalla M1.
Huomaa, kuinka buck-tilassa virta ohjataan lähtöön koko jakson ajan, kun taas buck-boost-virta toimitetaan lähtöön vain sen vaiheen aikana, jossa M2- ja M3_x-transistorit ovat päällä. Suurempi virransyöttö lähtöön (jaksoa kohti) tekee buck-muuntimesta tehokkaimman arkkitehtuurin.
Lähdöt syötetään siinä järjestyksessä, jossa niiden lähtövirheiden komparaattorit pyytävät. Nämä tunnetaan nimellä FIFO (first-in-first-out).
Kuten kuvassa yllä on esitetty, kolmea kytkintä syötetään yksi kerrallaan ja induktorivirta laskee 0 ampeeriin, millä vältytään ristiinsäätöongelmilta.
ENNEN AKKUAIKAA PIENEMMÄSSÄ KOOSSA
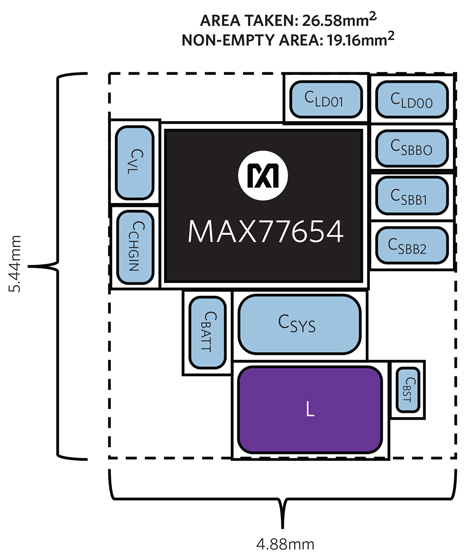
SIMO-regulaattorien ja integroitujen LDO-laitteiden ansiosta pieni MAX77654-tehonhallintapiiri eli PMIC (2,79 x 2,34 x 0,5 millimetriä) tuottaa virtaa pienimmillä häviöillä piirilevyalalla, joka on 41 prosenttia pienempi kuin tyypillinen toteutus. Koko ratkaisu vie piirilevyllä tilaa vain 19,2 neliömilliä.
HYÖTYSUHDE
Kyky ohjelmoida buck-tila aina tarvittaessa tuo suuremman hyötysuhteen. SIMO-buck-toiminto tuo 10 prosentin hyötysuhde-edun verrattuna buck-boost-toimintaan. Ohjelmoitava induktorin huippuvirtaraja, IP_SBBX on asetettu arvoon 0,5A.
TYYPILLINEN TEHONHALLINNAN TOTEUTUS
Tyypillisessä älykellon virranhallintajärjestelmässä PMIC-piirillä on toteutettu akkulaturi, mikro-ohjaimen virtaa syöttävä buck-muunninta ja näytölle virtaa jakava LDO. Toinen mikropiiri (kaksois-LDO) antaa virran antureille ja Bluetoothille.
SIMO-TEHOETU
Tyypillisessä pienen tilan ratkaisussa LDO:n raskas käyttö johtaa vain 73,8 prosentin kokonaishyötysuhteeseen.
SIMO-ratkaisun ylivoimainen hyötysuhde johtaa hitaampaan akun tyhjenemiseen, kun taas sen laajempi toiminta-alue - jopa 2,7 volttiin - pidentää älykellon toimintaa-aikaa, kun sitä ei ole liitetty mihinkään. Kaikki aktiiviset ja passiiviset komponentit on esitetty alla.
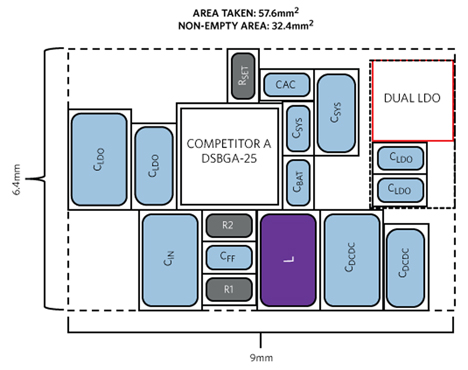
Tämä tyypillinen puettavan laitteen ratkaisu vie piirikortilla tilaa noin 32,4 mm2 eli 69 prosenttia enemmän kuin SIMO-pohjainen ratkaisu (19,2 mm2). Ratkaisun suhteellisen matala integraatiotaso, useiden LDO-regulaattorien käyttö ja suuremmat passiivikomponentit johtavat toteutukseen, joka on sekä suurempi että enemmän tehoa kuluttava.
Maxim Integrated Productsin Reno Rossettin jaã´Tran Derekin kirjoittama artikkeli ilmestyi tuoreessa ETNdigi-lehdessä. Sitä pääset lukemaan tästä.





 <
<









 Tekoäly on jo selkeästi ohittanut kokeiluvaiheen. Avnet Insights 2026 -selvityksen mukaan tekoäly on monilla elektroniikan aloilla jo mukana käytössä olevissa tuotteissa, ja sen soveltaminen yleistyy nopeasti kaikkialla EMEA-alueella.
Tekoäly on jo selkeästi ohittanut kokeiluvaiheen. Avnet Insights 2026 -selvityksen mukaan tekoäly on monilla elektroniikan aloilla jo mukana käytössä olevissa tuotteissa, ja sen soveltaminen yleistyy nopeasti kaikkialla EMEA-alueella.