Nopeat häiriöpiikit muodostavat vakavan ongelman moottorinohjaimissa ja muissa ohjausjärjestelmissä. Analog Devicesin uusimmat eristetyt sigma-delta-modulaattorit nostavat yhteismuotoisten transienttien siedon CMTI-lukemat uudelle tasolle ja vähentävät merkittävästi lämpötilan muutosten aiheuttamaa ryömintää. Tästä on suurta hyötyä nykyaikaisten ohjausjärjestelmien mittaussovelluksissa.
|
Artikkelin kirjoittaja Nandin Xu toimii tuotesovellusinsinöörinä Analog Devices -yhtiön Shanghain toimipisteessä. Hän vastaa eristettyjen modulaattorien ja tarkkuusmuuntimien teknisestä tuesta kaikkialla Kiinassa. Hän on ollut ADI:n työntekijä vuodesta 2013 suoritettuaan MSc-tutkinnon Huazhongin tiede- ja teknologiayliopistossa ohjaustekniikassa ja -tieteessä. |
Tässä artikkelissa esitellään ensin yhteismuotoisten transienttien sietoa kuvaava CMTI-spesifikaatio ja sen merkitys järjestelmälle. Sen jälkeen käsitellään uutta erotettua sigma-delta-modulaattoriperhettä, sen suorituskykyä ja kuinka piirien avulla voidaan parantaa järjestelmän virranmittausten tarkkuutta, erityisesti offsetin ja sen ryöminnän osalta. Lopuksi esitellään suositeltu toteutusratkaisu.
Erotettuja modulaattoreita käytetään laajasti moottorinohjaimissa ja inverttereissä, joissa vaaditaan suurta tarkkuutta virranmittauksessa ja galvaanista erotusta. Moottorinohjaus- ja invertterijärjestelmien korkeamman integraatiotason ja paremman hyötysuhteen myötä SiC- ja GaN-FET-transistorit ovat alkaneet korvata MOSFET- ja IGBT-kytkimiä pienemmän koon, korkeamman kytkentätaajuuden ja pienempien jäähdytyslevyjen ansiosta.
Erotuskomponenteilta vaaditaan kuitenkin korkeaa CMTI-suorituskykyä. Tarkempi virranmittaus on myös tarpeen. Uuden sukupolven erotetut modulaattorit parantavat huomattavasti järjestelmän CMTI-kykyä ja tarkkuutta.
Mitä CMTI tarkoittaa?
Yhteismuotoisten transienttien sieto eli CMTI (Common-Mode Transient Immunity) on tunnusluku, joka määrittää erotusrajan yli syötetyn transienttipulssin suurimman sallitun nousu- ja laskunopeuden, jonka ylittäminen aiheuttaa kellosignaalin tai datan vääristymisen. Sekä pulssin muutosnopeus että absoluuttinen yhteismuotojännite (VCM) dokumentoidaan.
Uudentyyppiset erotetut modulaattorit testataan sekä staattisissa että dynaamisissa CMTI-olosuhteissa. Staattisessa testauksessa piiristä havaitaan yksibittiset virheet. Dynaamisessa testauksessa tarkkaillaan satunnaisten CMTI-pulssien vaikutusta suodatetun datalähdön kohinaan. Testausjärjestelyn lohkokaavio on esitetty kuvassa 1.
CMTI on tärkeä tunnusluku, koska nopeat (suuritaajuiset) transientit voivat häiritä datansiirtoa erotusrajan yli. Näiden transienttien sietokyvyn ymmärtäminen ja mittaaminen on tärkeää. ADI:n kehittämät testausmenetelmät perustuvat standardiin IEC 60747-17, jossa määritetään magneettisten ja kapasitiivisten kytkimien yhteismuotoisten transienttihäiriöiden sietokyvyn (CMTI) mittausmenetelmiä.
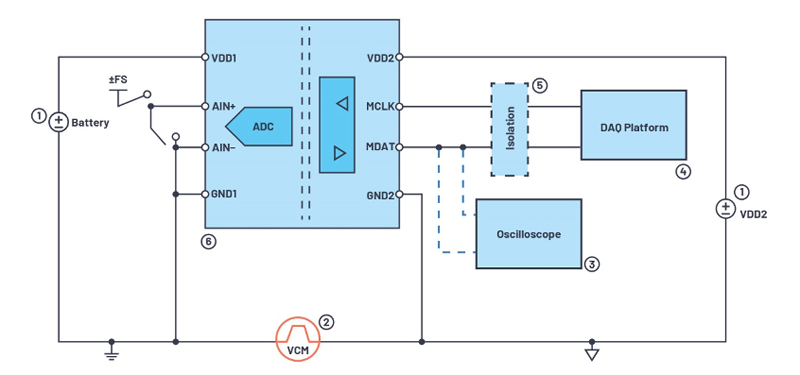
Kuva 1. CMTI-testauksen yksinkertaistettu lohkokaavio.
Eristetyn modulaattorin CMTI-testaus
Yksinkertaistettu CMTI-testausalusta sisältää seuraavat, kuvassa 1 nähtävät osat:
- - Akkupohjainen jännitelähde VDD1/VDD2-syöttölinjoja varten
- - Korkeiden yhteismuotopulssien generaattori
- - Oskilloskooppi datan seurantaan
- - Datankeruualusta datan analysointiin sekä kertoimella 256 desimoiva sinc3 -suodin erotettua modulaattoria varten
- - Erotusmoduuli (yleensä optoerotin)
- - Erotettu modulaattori
Staattisessa ja dynaamisessa CMTI-testissä käytetään samaa alustaa – vain tulosignaalit ovat erilaisia. Tätä alustaa voidaan käyttää myös muiden erotettujen piirien CMTI-suorituskyvyn testaamiseen. Erotetuissa modulaattoreissa yksibittinen datavirta desimoidaan ja suodatetaan sekä siirretään sitten moottorin ohjausjärjestelmän ohjaussilmukkaan, jotta dynaaminen CMTI-testi on kattavampi ja hyödyllisempi.
Kuvat 2 ja 3 kuvaavat aika- ja taajuusalueen dynaamista suorituskykyä eri CMTI-tasoilla. Kuvasta 2 nähdään häiriötason nousevan, kun korkea VCM-transienttisignaali syötetään samalle erotetulle modulaattorille. Kun VCM-transientin amplitudi ylittää modulaattorille spesifioidun arvon, aikatasolla näkyy erittäin voimakkaita häiriöitä (kuva 2c). Moottorinohjausjärjestelmissä tällaiset häiriöt aiheuttavat vakavia seurauksia, kuten vääntömomentin suurta aaltoilua.
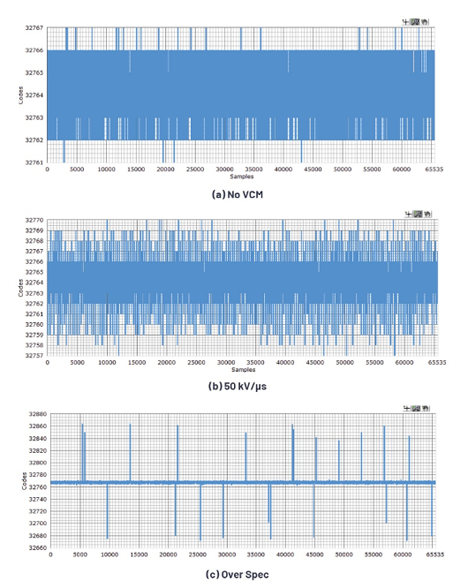
Kuva 2. Aikatason dynaaminen CMTI-suorituskyky.
Kuvassa 3 nähdään taajuustason (FFT) suorituskyky eritaajuisilla transienteilla (VCM-taso sama, muuttuva periodi). Kuvan 3 tulokset osoittavat, että harmonisten häiriöiden määrä on vahvasti suhteessa transienttien taajuuteen. Eli mitä parempi on erotusmodulaattorin CMTI-suorituskyky, sitä alhaisempi on kohinataso FFT-analyysissä.
Edellisen sukupolven erotettuihin modulaattoreihin verrattuna seuraavan polven ADuM770x-piirit parantavat CMTI-suorituskykyä tasolta 25 kV/us tasolle 150 kV/us. Tämä parantaa merkittävästi järjestelmän transienttimuotoisten häiriöiden sietoa, kuten taulukon 1 vertailusta voidaan nähdä.
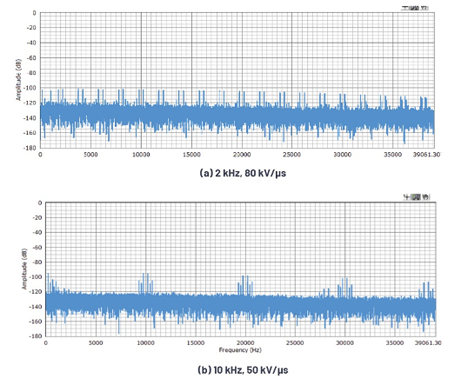
Kuva 3. Taajuustason dynaaminen CMTI-suorituskyky.
Järjestelmätason kompensointi ja kalibrointi
Mitä suurempi on moottorinohjaus- tai invertterijärjestelmän virtadatan tarkkuus, sitä vakaampi ja tehokkaampi on koko järjestelmä. Offset- ja vahvistusvirheet ovat yleisiä DC-virhelähteitä AD-muuntimissa. Kuvasta 4 nähdään, kuinka offset- ja vahvistusvirhe vaikuttavat AD-muuntimen siirtofunktioon.
Nämä virheet voivat vaikuttaa järjestelmän toimintaan vääntömomentin tai nopeuden aaltoiluna. Niiden vaikutusten rajoittamiseksi virheet voidaan useimmissa järjestelmissä kalibroida pois ympäristön lämpötilassa.
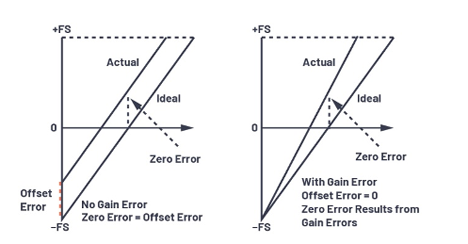
Kuva 4. AD-muuntimen siirtofunktion offset- ja vahvistusvirhe.
Muussa tapauksessa offsetin ryömintä ja vahvistusvirheet koko lämpötila-alueella ovat huolenaihe, koska niitä on vaikeampi kompensoida. Mikäli järjestelmän lämpötila tunnetaan, offsetin ja vahvistuksen ryöminnän kompensointi on saavutettavissa (vaikka se onkin kallista ja aikaa vievää) muuntimissa, joissa on lineaariset ja ennustettavat ryömintäprofiilit. Tähän päästään lisäämällä profiiliin kompensointikerroin, jotta offsetin ryömintäprofiili saadaan mahdollisimman tasaiseksi.
Tämä yksityiskohtainen kompensointimenetelmä on kuvattu sovellusohjeessa AN-1377. Tällä menetelmällä voidaan pienentää AD7403/AD7405 -piirien datalehdissä määritettyä ryömintälukemaa jopa 30% offset-ryöminnän osalta ja 90% vahvistusvirheen ryöminnän osalta. Tätä kompensointimenetelmää voidaan soveltaa myös mihin tahansa muihin muunninkomponentteihin, kun halutaan vähentää offsetin ja vahvistuksen ryömintää järjestelmätasolla.
Katkaisutekniikka käyttöön
Vaihtoehtoinen katkaisutekniikkaan (chopping) perustuva rakenne on tehokkaampi ja kätevämpi suunnittelijoiden käyttöön, ja se voidaan myös integroida helposti piille offsetin ja vahvistuksen ryöminnän minimoimiseksi. Chopping-menettelyn periaatekaavio on esitetty kuvassa 5. AD-muuntimessa toteutettu ratkaisu katkaisee koko analogisen signaaliketjun mahdollisten offset-virheiden ja matalataajuisten häiriöiden poistamiseksi.
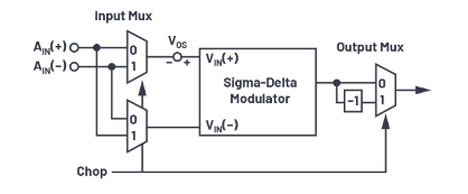
Kuva 5. Katkaisutekniikan (chopping) toteutus AD-muuntimessa.
Modulaattorin differentiaalinen tulo käännetään vuorotellen (tai katkaistaan) tuloasteen multiplekserissä, ja AD-muunnos suoritetaan kullekin katkaisun vaiheelle (kytketään Mux tilaan ”0” tai ”1”). Modulaattorin katkaisutoiminto käännetään lähtömuxissa ennen lähtösignaalin siirtämistä digitaalisuotimelle.
Jos sigma-delta-modulaattorin offset esitetään muodossa VOS, niin lähtö on (AIN(+) - AIN (-)) + VOS, kun katkaisu on tilassa 0. Vastaavasti lähtö on -[(AIN(-) - AIN(+)) + VOS], kun katkaisu on tilassa 1. Virhejännite VOS poistetaan laskemalla näiden kahden tuloksen keskiarvo, jolloin digitaalisuodin antaa tuloksen (AIN (+) - AIN (-)), joka on yhtä suuri kuin differentiaalinen tulojännite ilman offset-termiä.
Uusimman erotetun modulaattoriversion offset- ja vahvistusvirheisiin liittyvää suorituskykyä on parannettu optimoimalla piirin sisäistä analogista suunnittelua ja käyttämällä uutta katkaisutekniikkaa. Tämä yksinkertaistaa erittäin merkittävästi järjestelmän suunnittelua ja lyhentää kalibrointiaikaa. Uusimmilla ADuM770x-piireillä on korkein erotustaso ja paras AD-muunnosten suorituskyky lajissaan. Saatavilla on myös LDO-versio, joka yksinkertaistaa järjestelmän teholähteen suunnittelua.
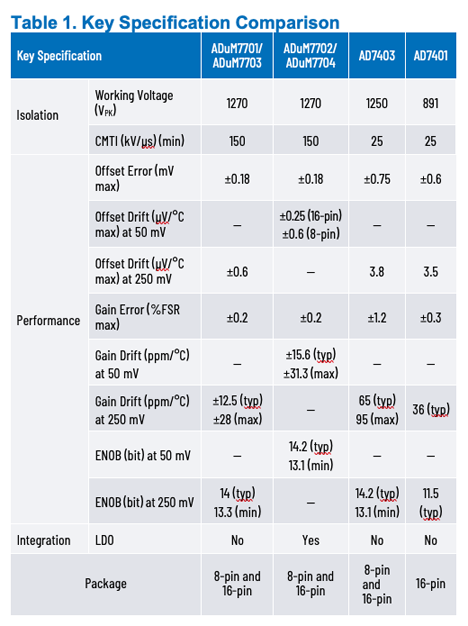
Taulukko 1. Avainspeksien vertailu.
Suositus piirisuunnitteluun
Tyypillinen moottorijärjestelmän virranmittauspiiri on esitetty kuvassa 6. Järjestelmässä tarvitaan kolme vaihevirran mittauspiiriä, mutta lohkokaaviossa on esitetty vain yksi. Kaksi muuta mittauspiiriä ovat samanlaisia ja esitetty sinisellä katkoviivalla. Vaihevirran mittauspiiristä nähdään, että rinnakkaisvastuksen RSHUNT toinen puoli on kytketty ADuM770x-8-piirin tuloon. Toinen puoli on kytketty korkeajännitekytkimiin (IGBT tai MOSFET) ja moottoriin.
Korkeajännitekytkinten vaihtaessa tilaa, ilmenee aina yli-, ali- tai muita epävakaita jännitteitä. Vastaavasti RSHUNT-vastuksen jännitteen vaihtelu siirtyy ADuM770x-8-piiriin ja siihen liittyvä data vastaanotetaan piirin nastaan DATA. Järjestelmän osien sijoittelu ja eristyksen suunnittelu voivat parantaa tai heikentää jännitteen vakautta, mikä vaikuttaa vaihevirran mittaustarkkuuteen.
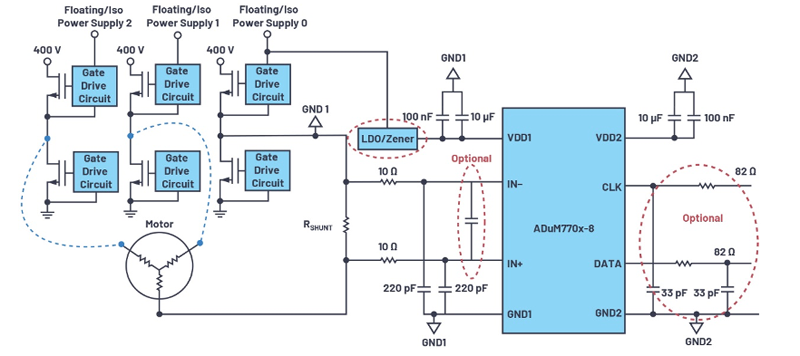
Kuva 6. Tyypillinen moottorijärjestelmän virranmittauspiiri.
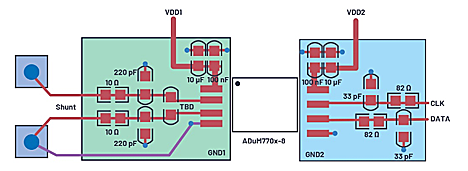
Kuva 7. Suositeltava osien sijoittelu levylle ADuM770x-8-piiriä varten.
Suositeltava piirikaavio on esitetty kuvassa 6:
- VDD1/VDD2-syöttölinjojen erottamiseksi tarvitaan 10μF/100nF kondensaattorit, jotka tulee sijoittaa mahdollisimman lähelle kyseisiä nastoja.
- Mukaan tarvitaan 10Ω/220pF RC-suodin.
- Valinnaista differentiaalikondensaattoria suositellaan vähentämään shunttivastuksen aiheuttamaa kohinaa. Kondensaattori tulee sijoittaa lähelle IN+/IN- -nastaa (0603-kotelo suositeltava).
- Jos digitaalinen lähtölinja on pitkä, suositellaan 82Ω/33pF RC-suodinta. Hyvän suorituskyvyn varmistamiseksi kannattaa harkita suojattua kierrettyä parikaapelia.
- Jos halutaan vieläkin parempaa suorituskykyä, kannattaa harkita nelinapaisen shunttivastuksen käyttöä.
Parhaan suorituskyvyn saavuttamiseksi tarvitaan myös laadukas osien sijoittelu piirilevylle. Suositeltava layout on esitetty kuvassa 7. Differentiaaliparin reititystä shunttivastuksesta IN+/IN- -tulonastoihin suositellaan yhteismuotoisen vaimennussuhteen (Common Mode Rejection) parantamiseksi. 10Ω/220pF suodin tulee sijoittaa mahdollisimman lähelle IN+/IN- -tulonastoja. 10μF/100nF suodatuskondensaattorit tulee sijoittaa tehonsyötön VDD1/VDD2-nastojen lähelle.
On suositeltavaa, että osittainen maataso GND1 sijoitetaan tulopuolen piirien alle signaalin vakauden parantamiseksi. Erillinen GND1-linja (näkyy violetin värisenä rinnan differentiaaliparin reitityslinjan kanssa) tähtikytkentänä shunttivastuksesta ADuM770x-8-piirin GND-nastaan on tarpeen teholähteen syöttämän virran vaihtelujen vaikutuksen vähentämiseksi. Näiden suositusten mukaisen piirikaavion ja osien sijoittelun hyödyntäminen auttaa merkittävästi järjestelmän suunnitteluvaiheessa.
Viitteet
ADuM7704 data sheet. Analog Devices, Inc., August 2020.
Heo, Hong-Jun; Seon-Ik Hwang; Jang-Mok Kim; and Jin-Woo Choi. “Compensating of Common Scaling Current-Measurement Error for Permanent Magnet Synchronous Motor Drives.” 2016 IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), May 2016.
McCarthy, Mary. “AN-1131: Chopping on the AD7190, AD7192, AD7193, AD7194, and AD7195.” Analog Devices, Inc., October 2011.
Merino, Miguel Usach and Gerard Mora Puchalt. “Integrated Capacitive PGAs in ADCs: Redefining Performance.” Analog Dialogue, Vol. 50, No. 3, August 2016.
O’Byrne, Nicola. “MS-2652: Measurement Techniques for Industrial Motion Control.” Analog Devices, Inc., June 2014.











 IGBT on pitkään ollut teollisuuden tukipilari, joka yhdistää suuren tehon yksinkertaisiin ohjaustapoihin. Uuden polven IGBT7-teknologia on saanut merkittäviä parannuksia verrattuna aiempiin sukupolviin: alhaisempi myötäjännite, suuremmat nimellisvirrat, ylikuormituskapasiteetti 175°C asti, tarkempi dv/dt-säätö ja laadukkaampi suojadiodi.
IGBT on pitkään ollut teollisuuden tukipilari, joka yhdistää suuren tehon yksinkertaisiin ohjaustapoihin. Uuden polven IGBT7-teknologia on saanut merkittäviä parannuksia verrattuna aiempiin sukupolviin: alhaisempi myötäjännite, suuremmat nimellisvirrat, ylikuormituskapasiteetti 175°C asti, tarkempi dv/dt-säätö ja laadukkaampi suojadiodi.