











 Nykyaikaisissa ajoneuvoissa on lukuisia järjestelmiä ja vimpaimia, ja niiden määrä kasvaa joka vuosi. Joillakin niistä pyritään houkuttelemaan ostajia tai lisäämään mukavuutta. Yleisiä esimerkkejä ovat tunnelmavalot, huippuluokan viihdejärjestelmät, erilaiset suorituskykytilat, esiasetetut istuinasetukset, peilien asennot jne. Muut järjestelmät ovat kuljettajan ja matkustajien turvallisuutta varten, joita kutsutaan yleisesti nimellä ADAS (Advanced Driver Assistance Systems). Yleisiä esimerkkejä näistä ovat mukautuva vakionopeussäädin, automaattinen hätäjarrutus, peruutuskamerat, eteenpäin tunnistus ja surround-kamerat.
Nykyaikaisissa ajoneuvoissa on lukuisia järjestelmiä ja vimpaimia, ja niiden määrä kasvaa joka vuosi. Joillakin niistä pyritään houkuttelemaan ostajia tai lisäämään mukavuutta. Yleisiä esimerkkejä ovat tunnelmavalot, huippuluokan viihdejärjestelmät, erilaiset suorituskykytilat, esiasetetut istuinasetukset, peilien asennot jne. Muut järjestelmät ovat kuljettajan ja matkustajien turvallisuutta varten, joita kutsutaan yleisesti nimellä ADAS (Advanced Driver Assistance Systems). Yleisiä esimerkkejä näistä ovat mukautuva vakionopeussäädin, automaattinen hätäjarrutus, peruutuskamerat, eteenpäin tunnistus ja surround-kamerat.
|
Artikkelin on kirjoittanut onsemin vanhempi sovellusmarkkinoinnin insinööri Dan Clement. Hän analysoi markkinoita ja trendejä sovellustasolta, luo teknisiä myynnin dokumentteja, kouluttaa, määrittelee järjestelmäratkaisuja ja osallistuu tuotteiden tiekarttojen suunnitteluun. Clementillä on takanaan yli 20 vuotta puolijohdealalla. Hänellä on sähköinsinöörin tutkinto Utahin yliopistosta. |
Viimeisen 100 vuoden aikana nämä kuljettajaa avustavat järjestelmät ovat kehittyneet dramaattisesti mekaanisen vakionopeudensäätimen vaatimattomasta alusta visioon, jossa ajoneuvosta tulee ohjelmiston määrittämä, lisättyyn ja virtuaaliseen todellisuuteen eli metaversumiin uppoutunut järjestelmä, joka päätyy täysin autonomiseen ajamiseen.
Tällä hetkellä ajoneuvot ovat SAE Internationalin määrittelemällä autonomiatasolla 2+. Tasolla 2 osittainen automatisointi on sallittua, mutta kuljettajan on silti oltava tarkkaavainen ja valmis ottamaan ajoneuvo haltuunsa milloin tahansa. 2+-taso viittaa siihen, että todellisuudessa autonominen ajaminen on erittäin monimutkaista ja siihen pääseminen kestää kauemmin kuin ala odottaa. SAE-määrityksissä taso 5 tarkoittaa täyttää autonomiaa ja tasolla 0 ei ole mitään autonomiaa.
Tämä artikkeli on osa ADASin historiaa käsittelevää artikkelisarjaa. Tässä moniosaisessa sarjassa tarkastellaan eri järjestelmien tilejä. Viimeisessä artikkelissa käsitellään tulevaisuuden ADAS-järjestelmiä ja sitä, miten auto muuttuu mekaanisesta koneesta täysin digitaaliseksi kokemukseksi.
Vakionopeudensäädin
Ehkä varhaisin kuljettajan apujärjestelmä oli Speedostatin järjestelmä. Speedostat oli ensimmäinen versio nopeudensäätöjärjestelmästä (Steinken, 2020), jonka suunnitteli Ralph Teetor. Mielenkiintoista on, että hän sokeutui lapsena. Hän käytti tätä näön puutetta kehittääkseen yli-inhimillistä kosketusaistia ja keskittymiskykyä. Itse hän sanoi näiden ansiosta tulleensa niin hyväksi keksijäksi ja insinööriksi. Smithsonian Magazinessa (Sears, 2018) ilmestynyt artikkeli sisälsi kiehtovan katsauksen hänen elämäänsä.
Speedostat - jota usein kutsutaan nimellä "Stat" ja on patentoitu 22. elokuuta 1950 - koostui kojelaudan nopeudenvalitsimesta, joka oli yhdistetty mekaaniseen säätömekanismiin, joka oli peräisin ajoneuvon vetoakselista. Säätimen ohjaama tyhjiöpumppu nostaisi kaasupoljinta, antaen kuljettajalle haptisen signaalin hidastaa vauhtia.
Viisi vuotta patentin jälkeen Speedostatin sisältävä Popular Mechanics (Sears, 2018) sanoi, että se oli "eräänlainen sähkökäyttöinen kiihdytin tai säädin lisäominaisuuksineen. ”Se vie meitä useita kilometrejä lähemmäksi robottiautoja”, lehti visioi.
Chrysler oli ensimmäinen autonvalmistaja, joka otti käyttöön Speedostatin, ja he nimesivät sen "autopilotiksi" vuonna 1958. Cadillac käytti myös sitä, mutta he kutsuivat sitä nimellä "Cruise Controliksi". Tämä nimi yleistyi vakionopeudensäätimelle (Teetor, 2020).
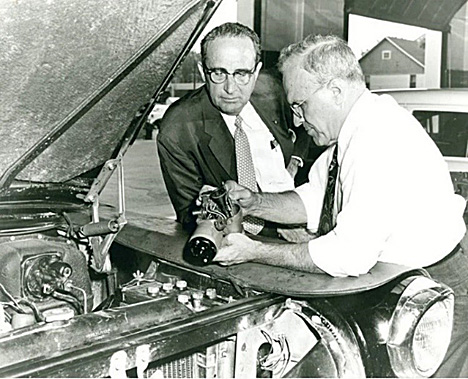
Kuva 1. Ralph Teetor vuonna 1957 kädessään vakionopeudensäädin (kuva: Automotive Hall of Fame).
Pian sen jälkeen, kun Teetorin Speedostat saavutti menestystä tuotantoajoneuvoissa, toinen teknologiavallankumous oli käynnistynyt: piitransistorin keksimisen myötä syntyivät integroidut piirit. Kun yksittäiset transistorit kehittyivät kokonaisiksi piireiksi sirulla, Daniel Wisner keksi ja patentoi (1971) ensimmäisen elektronisen vakionopeudensäätimen, jota kutsuttiin "moottoriajoneuvojen nopeudensäätimeksi" (Niemeier, 2016). Tämä uusi elektroninen nopeudensäädin pystyi säätelemään ajoneuvon nopeutta itsenäisesti, jopa ylä- ja alamäissä ensimmäistä kertaa. Tämä keksintö, joka tunnetaan lopulta vakionopeudensäätimenä, muutti ajoneuvoja ikuisesti. Kun sen suosio kasvoi, Motorola suunnitteli ja valmisti 1980-luvun lopulla piisirun, joka toteutti Wisnerin algoritmin. Monet ajoneuvot käyttivät tätä sirua pitkään. Sen osanumero oli MC14460, ja algoritmia käytetään edelleen yleisesti, vaikka MC14460-siru on kauan sitten poistettu käytöstä.
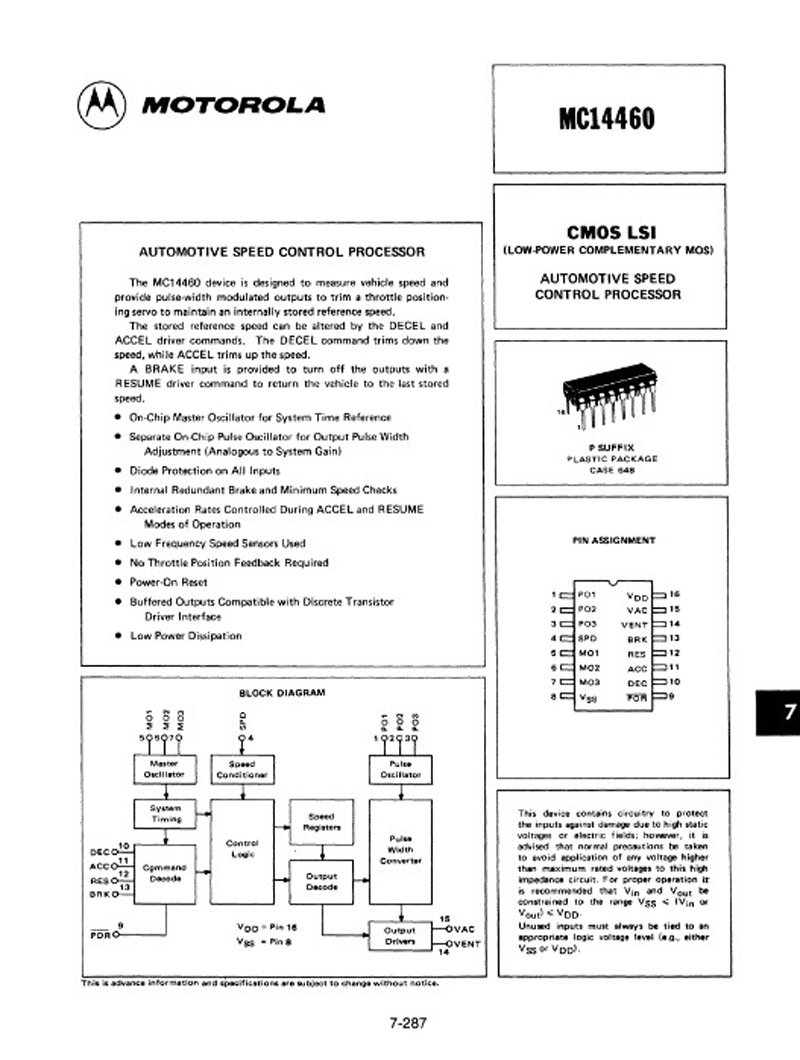
Kuva 2. MC14460-vakionopeusohjaimen datalehti (lähde: hackaday.com).
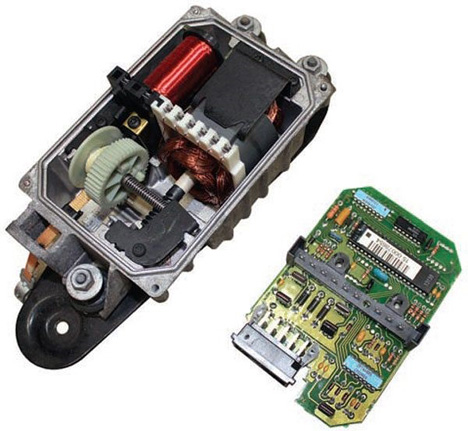
Kuva 3. GM:n vakionopeudensäädinmoduuli vuodelta 1996 (kuva: LS Engine DIY). Kuva esittää kaasuvaijerin elektronisen ohjauksen. Vasemmalla edeltänyt tyhjiöpohjainen järjestelmä.
Seuraava suuri innovaatio vakionopeudensäätimessä oli mukautuva vakionopeudensäädin, joka ilmestyi markkinoille 1990-luvun alussa. William Chundrlik ja Pamela Labuhn keksivät mukautuvan vakionopeudensäätimen (Steinken, 2020). Järjestelmä toimi samalla tavalla kuin tavallinen vakionopeussäädin, mutta otti käyttöön etäisyysmittausanturin, jonka avulla ajoneuvo voi hidastaa hitaampien autojen takana, mutta silti säilyttää nopeudenhallinnan. Ensimmäiset järjestelmät käyttivät lasereita, mutta useissa ratkaisuissa hyödynnettiin erilaisia antureita, mukaan lukien tutka, lidar ja kamerat.
ABS
Lukkiutumattomilla jarrujärjestelmillä (ABS), joiden juuret ovat ilmailussa, on myös mielenkiintoinen historia. ABS, kuten vakionopeudensäädin, aloitti myös mekaanisina järjestelminä. (Wikipedia, 2021)
Vuonna 1920 Gabriel Voisin, lentokoneiden ja autojen pioneeri, suunnitteli ja kokeili mekaanisia ABS-järjestelmiä lentokoneille. Järjestelmässä käytettiin vauhtipyörää, joka pyörii pyörän mukana ja ohjaa jarrujärjestelmän hydrauliventtiiliä. Kun sekä pyörä että vauhtipyörä pyörivät samalla nopeudella, järjestelmä vapauttaa jarrut. Jos pyörä äkillisesti hidastuisi, luultavasti pyörän luistaessa, vauhtipyörä jatkaisi pyörimistä nopeammin ja tämä suhteellinen pyörimisero avaisi hydraulisen jarruventtiilin vapauttaen renkaan pyörimään uudelleen. Tämä järjestelmä lyhensi jarrutusmatkaa jopa 30 prosenttia ja teki mahdolliseksi lennot olosuhteissa, joissa lentokoneet eivät voisi muuten lentää. Järjestelmän aiheuttama luiston väheneminen vähensi myös merkittävästi renkaiden kulumista.
Lentokoneiden lisäksi Royal Enfield Super Meteor -moottoripyörässä kokeiltiin ABS:ää vuonna 1958. Täysin mekaaninen järjestelmä osoitti, että ABS vähensi huomattavasti moottoripyörien luistoa, joka on yleinen onnettomuuksien syy. Valitettavasti yritys luopui järjestelmästä, koska sen tekninen johtaja ei nähnyt idealla arvoa.
Toisella täysin mekaanisella järjestelmällä tehtiin rajoitetusti kokeita 1960-luvulla Ferguson P99:ssä, Jensen FF:ssä ja nelivetoisessa Ford Zodiacissa. Tämä järjestelmä oli epäluotettava ja liian kallis, eikä se lähtenyt kunnolla lentoon.
Ensimmäinen täysin elektroninen ABS kehitettiin 1960-luvun lopulla – ei ajoneuvoja varten vaan Concordelle. Concorde oli paljon julkisuutta saanut innovatiivinen tekninen kehitys, joka vangitsi maailman huomion. Concorde tarvitsi pitkän kiitotien nousua ja laskeutumista varten, ja ABS:ää vaadittiin estämään luisuminen ulos kiitotieltä onnettomuuden sattuessa. Sitä vaadittiin myös normaalissa käytössä. Concorden lentoonlähtönopeus oli 250 solmua, paljon suurempi kuin keskimäärin kaupallisissa matkustajakoneissa sekä silloin että nyt (Heritage Concorde, 2021). Keskeytetty lentoonlähtö märällä kiitotiellä olisi vaarallista ilman ABS-jarrutusta.
Elektroninen ABS pääsi ensimmäiseen kuluttajille myytävään ajoneuvoon vuoden 1971 Chrysler Imperialissa. Bendix Corp. patentoi ratkaisun vuonna 1970 ja Chrysler antoi ratkaisulle nimeksi "Sure Brakeksi", jota kutsutaan yleisesti "luistonestoksi" (Schafer, 1971). Järjestelmä oli luotettava, ja muut valmistajat alkoivat tuoda markkinoille omia versioitaan.
Bendixin kannalta ikävästi kunnia modernin ABS:n keksimisestä kuuluu Mario Palazzettille Fiat Research Centerissä. Palazzetti paransi järjestelmää ja tuli myöhemmin tunnetuksi nimellä "Mister ABS". Bosch Mobility Solutions osti Palazzettin järjestelmän, nimesi sen uudelleen "ABS:ksi" ja jatkoi sen parantamista tuotantoajoneuvoissa, kunnes siitä tuli vakio-ominaisuus (Did You Know Cars).
ABS-järjestelmästä tuli vakio-ominaisuus kaikille autonvalmistajille, ja lähes jokainen tiellä liikkuva ajoneuvo käyttää sitä. Kuten vakionopeudensäädin, ABS on nykyään yleinen termi.
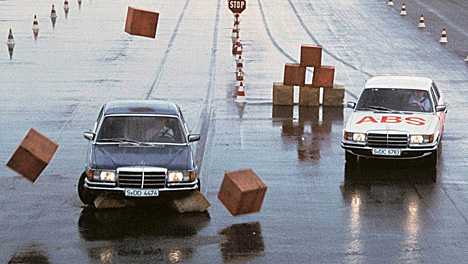
Kuva 4. Mercedes-Benzin ABS-testausta 1970-luvulla (kuva: stuff).
Luistonesto
Luistonestojärjestelmät (TCS) säätelevät pyörien pyörimiseen käytettävän tehon määrää. Aluksi vetävät pyörät käyttivät luistoarajoittavaa tasauspyörästöä rajoittamaan mekaanisesti luistavan pyörän tehoa. 1970-luvun alussa ajoneuvoihin lisättiin elektroninen luistonesto. Se valvoo pyörien nopeutta ja pyörien välisiä eroja ohjatakseen, kuinka paljon voimaa kullekin pyörälle menee. Jotkut järjestelmät ohjasivat ajoneuvon kaasua tai sytytystä, mutta useimmat päätyivät keskittymään ajoneuvon jarrujärjestelmän käyttöön. Itse asiassa useimmissa luistonestojärjestelmissä käytetään edellä kuvattua ABS:ää. Luistonestojärjestelmä, kuten ABS, on nykyään vakiovaruste.
Ajonvakautus
Vakautusjärjestelmät alkoivat ilmestyä markkinoille 1990-luvun alussa. Bosch esitteli järjestelmän vuoden 1995 Mercedes-Benz S600 coupéssa. (Markus, 2020)
Ajonvakautusjärjestelmä on myös integroitu ABS-järjestelmään ja luistonestojärjestelmään. Se lisää antureita, jotka ymmärtävät, kuinka ajoneuvo reagoi kuljettajan toimintoihin (kaasu ja ohjaus). Ohjauspyörän anturin dataa verrataan käännösanturiin ja kiihtyvyysantureihin ajoneuvon kulloisenkin ajotavan laskemiseksi. Vakautusjärjestelmä voi säätää jarrutusta, kaasua tai jousitusta parantaakseen ajettavuutta näiden tietojen avulla.
Ajonvakautusjärjestelmä tuli vakiovarusteeksi Yhdysvalloissa vuonna 2012. Luistonesto- ja ajonvakautusjärjestelmät ovat tärkeitä järjestelmiä, mutta ne eivät ole yhtä tunnettuja tai näkyviä kuin ABS ja mukautuva vakionopeudensäädin.
Lopuksi
Tässä artikkelissa esittelimme vakionopeudensäätimen, ABS:n, luistoneston ja ajonvakautusjärjestelmän historian ja kehityksen. Jokaisen järjestelmän historia on ainutlaatuinen ja mielenkiintoinen, ja aikaisempien suunnittelujen juuret ovat usein mekaanisia. Yhteistä eri järjestelmille on, että uusien järjestelmien kehittäminen, testaaminen ja hyväksyminen markkinoille vie usein vuosikymmeniä.
Seuraava artikkeli tutkii muita ADAS-järjestelmiä ja niiden historiaa. Viimeinen artikkeli keskittyy tulevaisuuden järjestelmiin ja kehitykseen kohti ohjelmistolla määriteltyä ajoneuvoa.
Viitteet
Blackstone, S. (2012, August 28). Business Insider. Retrieved from Adaptive Cruise Control Will Change Driving In America: https://www.businessinsider.com/how-adaptive-cruise-control-will-change-driving-in-america-2012-8
Cuffari, B. (2018, November 6). Back-Up Cameras – Why They Have Become U.S. Law. Retrieved from AZO Materials: https://www.azom.com/article.aspx?ArticleID=15688
Howard, B. (2021, October 21). Blind spot detection: Car tech that watches where you can’t. Retrieved from Extreme Tech: https://www.extremetech.com/extreme/165742-blind-spot-detection-car-tech-that-watches-where-you-cant
Kingston, L. (2018, June 11). Piston Heads. Retrieved from PH Origins: Autonomous emergency braking: https://www.pistonheads.com/features/ph-features/ph-origins-autonomous-emergency-braking/38171
Markus, F. (2020, June 9). Traction Control vs. Stability Control Systems: What Is the Difference? Retrieved from Motortrend: https://www.motortrend.com/features/traction-control-vs-stability-control/
Niemeier, H. (2016, February 11). The Collegian. Retrieved from Hillsdale alumnus inventor of cruise control: http://hillsdalecollegian.com/2016/02/hillsdale-alumnus-inventor-of-cruise-control/
Schafer, T. a. (1971, Feb 1). SAE Mobilus. Retrieved from The Chrysler “Sure-Brake” - The First Production Four-Wheel Anti-Skid System: https://saemobilus.sae.org/content/710248/#abstract
Sears, D. (2018, March 8). Smithsonian Magazine. Retrieved from The Sightless Visionary Who Invented Cruise Control: https://www.smithsonianmag.com/innovation/sightless-visionary-who-invented-cruise-control-180968418/
Steinken, M. (2020, January 27). Adapt Automotive. Retrieved from Timeline: Milestones in ADAS Before 2010: https://www.adaptautomotive.com/articles/51-timeline-milestones-in-adas-before-2010
Teetor, J. (2020, October 15). The Classic Cars Journal. Retrieved from Who was Ralph Teetor and why is he in the Automotive Hall of Fame?: https://player.vimeo.com/video/269276416?h=d6ae7e96c2
Unknown. (2021, October 21). Cameron Gulbransen. Retrieved from Kids and Cars: https://www.kidsandcars.org/child_story/cameron-gulbransen/
Unknown. (2021, October 11). Heritage Concorde. Retrieved from Concorde Landing Gear Braking Systems: https://www.heritageconcorde.com/landing-gear-braking-systems
Unknown. (2021, October 21). Lovering Volvo Cars Nashua. Retrieved from Blind Spot Information System: https://www.loveringnashua.com/blind-spot-information-system.htm
Unknown. (2021, October 11). Wikipedia. Retrieved from Anti-lock braking system: https://en.wikipedia.org/wiki/Anti-lock_braking_system
Unknown. (2021, October 8). Wikipedia. Retrieved from CMOS: https://en.wikipedia.org/wiki/CMOS
Unknown. (2021, October 11). Wikipedia. Retrieved from Traction control system: https://en.wikipedia.org/wiki/Traction_control_system
Unknown. (2021, October 21). Wikipedia. Retrieved from Backup Camera: https://en.wikipedia.org/wiki/Backup_camera
Unknown. (n.d.). Did You Know Cars. Retrieved Dec 16, 2021, from The History of Anti-Lock Brakes: https://didyouknowcars.com/history-of-anti-lock-brakes/
















 Tekoäly on jo selkeästi ohittanut kokeiluvaiheen. Avnet Insights 2026 -selvityksen mukaan tekoäly on monilla elektroniikan aloilla jo mukana käytössä olevissa tuotteissa, ja sen soveltaminen yleistyy nopeasti kaikkialla EMEA-alueella.
Tekoäly on jo selkeästi ohittanut kokeiluvaiheen. Avnet Insights 2026 -selvityksen mukaan tekoäly on monilla elektroniikan aloilla jo mukana käytössä olevissa tuotteissa, ja sen soveltaminen yleistyy nopeasti kaikkialla EMEA-alueella.