











 Artikkelisarjan toisessa osassa jatketaan ADAS-järjestelmien tekniikoiden ja historian käsittelyä. Ensimmäisessä osassa kerrottiin vakionopeudensäädöstä, ABS-jarruista, luistonestosta ja ajonvakautuksesta. Tässä jaksossa käsitellään törmäyksenestoa, automaattista hätäjarrutusta (AEB), peruutuskameraa, kuollen kulman varoitusta, edistyksellisiä ajovaloja ja rengaspaineiden valvontaa.
Artikkelisarjan toisessa osassa jatketaan ADAS-järjestelmien tekniikoiden ja historian käsittelyä. Ensimmäisessä osassa kerrottiin vakionopeudensäädöstä, ABS-jarruista, luistonestosta ja ajonvakautuksesta. Tässä jaksossa käsitellään törmäyksenestoa, automaattista hätäjarrutusta (AEB), peruutuskameraa, kuollen kulman varoitusta, edistyksellisiä ajovaloja ja rengaspaineiden valvontaa.
|
Artikkelin on kirjoittanut onsemin vanhempi sovellusmarkkinoinnin insinööri Dan Clement. Hän analysoi markkinoita ja trendejä sovellustasolta, luo teknisiä myynnin dokumentteja, kouluttaa, määrittelee järjestelmäratkaisuja ja osallistuu tuotteiden tiekarttojen suunnitteluun. Clementillä on takanaan yli 20 vuotta puolijohdealalla. Hänellä on sähköinsinöörin tutkinto Utahin yliopistosta. |
Automaattinen hätäjarrutus eli AEB (Automatic Emergency Braking) tarkoittaa ajoneuvon kykyä havaita uhkaava vaara tai kuljettajan reagoimattomuus vaarallisessa tilanteessa sekä jarruttaa automaattisesti törmäysriskin minimoimiseksi tai jopa estämiseksi. Tämä voi tapahtua pysäköinnin, kaistanvaihdon tai eteenpäin suuntautuvan törmäysuhan havaitsemisen aikana, jalankulkijat mukaan lukien. AEB:tä kutsutaan joskus myös keulatörmäyksen tunnistimeksi (forward collision sensing).
Kuten aiemmilla innovaatioilla, myös AEB-järjestelmällä on värikäs historia. Järjestelmän synty juontaa juurensa RCA-yhtiön insinööriin nimeltä Nathaniel Korman, joka osallistui tutkapohjaisten järjestelmien kehittämiseen toisen maailmansodan aikana. Sodan jälkeen RCA alkoi etsiä ei-sotilaallisia sovelluksia.
Korman työskenteli tutkapohjaisten nopeudenvalvontajärjestelmien parissa keskittyen liikenteen sujuvuuden parantamiseen. Suurin osa työn alkuperäisestä painopisteestä oli junajärjestelmissä ja siinä korostui liikennevirran ja kapasiteetin keventäminen risteyksissä. Myöhemmin hän huomautti, että myös maantieajoneuvot voisivat käyttää tämäntyyppistä järjestelmää.
”Keksinnössä hyödynnetään ohjattavaan ajoneuvoon sijoitettua tutkajärjestelmää. Järjestelmä tuottaa jännitteen, joka riippuu etäisyydestä edellä kulkevaan ajoneuvoon. Tätä jännitettä verrataan ajoneuvon nopeudesta riippuvaan jännitteeseen, ja ajoneuvoa ohjataan vertailutulosten perusteella”, Korman esitti [Viite Kin18 \l 1033]. Vuonna 1948 jätetyssä ja 1955 hyväksytyssä patentissa kuvattiin järjestelmän toiminta.
Ajan myötä teollisuudessa oivallettiin tutkan arvo sotilas- ja ilmailusovellusten ulkopuolella. George Rashid – joka asui lähellä usein sumuista Michigan-järveä – keksi ensimmäisen automatisoidun tutkapohjaisen jarrujärjestelmän ajoneuvoja varten. Sumu ja siihen liittyvät onnettomuudet sekä ’läheltä piti’ -tilanteet inspiroivat Rashidia luomaan järjestelmän, koska tutka näki sumun läpi ja toimi luotettavasti.
Rashid visioi myös sen käyttämistä aiemmin kehitetyssä moottoritiejärjestelmässä, jota käyttävät kuljettajat saattoivat helposti väsyä ja menettää huomiokykyään pitkien ajomatkojen aikana. Hän oli myös kiinnostunut tekniikan mahdollisuuksista auttaa ikääntymisen vuoksi muita hitaammin reagoivia kuljettajia.
Kun Rashidin kehittämä järjestelmä havaitsi törmäysuhan, se katkaisi ajoneuvon kaasun ja jarrutti. Vaikka järjestelmä oli onnistuneiden testausjaksojen aikana osoittanut kykynsä vähentää onnettomuuksia, se ei kuitenkaan yltänyt kaupalliseen käyttöön. Pelot vastuista ja oikeudenkäynneistä koskien mahdollisia ketjukolareita muiden tavanomaisten ajoneuvojen kanssa olivat huolestuttavia. Ehkä suurin tekninen huolenaihe kohdistui järjestelmässä käytettäviin tyhjöputkiin, jotka olivat kooltaan suuria ja pitkän aikavälin luotettavuudeltaan epäilyttäviä. Tämä vaikeutti järjestelmän kaupallistamista.
Rashidin kuoleman jälkeen hänen poikansa yritti elvyttää järjestelmää etsimällä sijoittajia ja puhumalla kaupallisesti houkuttelevamman transistoripohjaisen ratkaisun puolesta. Transistorien ja integroitujen piirien kaupallistaminen ja miniatyrisointi etenivät nopeasti 1970-luvun puolivälissä.
Huolimatta kooltaan pienemmän ja rakenteeltaan kestävämmän ratkaisun houkuttelevuudesta, Rashidin poika päätyi nauttimaan enemmän tulevasta rahasta ja maineesta. Myöhemmin hän sortui jopa huijaamaan sijoittajia houkutellessaan heitä investoimaan ja pilasi näin rahoittajien kiinnostuksen teknologiaan.
Onneksi monet autotehtaat huomasivat Rashidin patentin ja viittasivat siihen kehittäessään omia järjestelmiään. Ehkä tunnetuin ja varhaisin toteutus oli General Motorsin vuoden 1959 konseptiauto, jonka suunnittelivat Harley Earl ja Bill Mitchell.

Kuva 1. General Motorsin 1959 Cadillac Cyclone -konseptiauto, jonka suunnittelivat Harley Earl ja Bill Mitchell. Kuva: Piston Heads.
Cadillac Cyclone -konseptiautossa oli tutkapohjainen järjestelmä törmäysuhan tunnistukseen. Tutkalaitteet oli sijoitettu näyttävästi auton etusiivekkeisiin, jotka heijastivat tuon aikakauden raketti- ja lentotekniikan kehitysvaiheita. Järjestelmän tutka laski etäisyyden ajoneuvon edessä olevaan kohteeseen ja varoitti kuljettajaa eteen ilmestyvistä esineistä ja niiden etäisyydestä. Kuljettajan vastuulla oli toimia varoituksen perusteella. Tämä konseptiauto oli kuitenkin merkittävä askel kohti järjestelmän kaupallistamista.
1960- ja 1970-luvuilla useat yritykset jatkoivat erityyppisten törmäyksenestojärjestelmien kehittämistä. Suunnittelijat ja sääntelyviranomaiset olivat erittäin huolissaan siitä, että kuljettajat alkavat luottaa liikaa näihin järjestelmiin ja saattavat aiheuttaa enemmän onnettomuuksia sen sijaan, että vähentäisivät kolarointia. Tämä käyttäytyminen oli havaittu laajojen testausjaksojen aikana. Liikenneturvaa USA:ssa hallinnoiva NHTSA (National Highway Traffic Safety Administration) ehdotti, että vasta 1980-luvulla nämä järjestelmät voisivat olla riittävän turvallisia otettavaksi käyttöön [Viite: Kin18 \l 1033].
Vasta 1990-luvulla järjestelmä tuotiin markkinoille. Vuonna 1992 Mitsubishi julkisti Debonair-mallissaan laserpohjaisen Distance Warning -järjestelmän, joka varoitti kuljettajaa, jos jokin muu esine tuli liian lähelle ajoneuvoa. Vähän myöhemmin Diamante-mallissa julkaistiin suljetun silmukan järjestelmä nimeltä Preview Distance Control. Tämä järjestelmä sulki kaasun ja antoi näin lisää aikaa reagoimiseen auttaakseen kuljettajaa välttämään törmäyksen.
1990-luvulla muut autonvalmistajat kehittivät voimakkaasti omia järjestelmiään. Nopeasti havaittiin, että nämä eteenpäin tunnistavat törmäyksenestojärjestelmät voisi ja pitäisi yhdistää automaattijarrujen ja vakionopeudensäätimien toimintoihin.
Honda oli ensimmäinen yritys, joka alkoi vuonna 2003 myydä automaattista jarrujärjestelmää nimeltä Collision Mitigation Braking System. Toyota, Mercedes ja Volvo kehittivät vastaavaa järjestelmää hyvin nopeaan tahtiin.

Kuva 2. Mercedes Benzin Distronic-järjestelmä 1990-luvulta. Kuva: Piston Heads.
Vuonna 2012 julkaistu lehtiartikkeli esitteli mukautuvan vakionopeudensäätimen (ACC) ja automaattisen hätäjarrutuksen (AEB) suurelle yleisölle [Viite Bla12 \l 1033]. Artikkeli teki hyvää työtä selostaessaan, kuinka ACC- ja AEB-järjestelmät toimivat. Mutta artikkelin paras osa käsitteli tulevaisuutta: kuljettajat voisivat vain istua ja lukea vaikkapa lehteä samalla, kun auto ajaisi omatoimisesti esimerkiksi työpaikalle. Vaikka tämä visio on edelleenkin tavoitteena, ja viimeisten kymmenen vuoden aikana on tapahtunut paljon edistystä, on edelleen pitkä matka siihen, että koko ajoprosessi voidaan varmistaa täydellisesti.
Tämän päivän autoilla on paljon edistyneempiä tarpeita eteenpäin suunnatuille antureille, kun autoteollisuudessa käydään kisaa kohti täysin autonomista ajamista. Varhaiset järjestelmät pystyivät ’näkemään’ vain kymmeniä metrejä. Nykyiset järjestelmät sen sijaan näkevät jopa 300 metriin ja pidemmällekin erilaisten anturijärjestelmien yhteensulautumisen ansiosta: korkean dynaamisen alueen kamerat, pitkän matkan LiDAR- tai Radar-anturit sekä erittäin nopeat konenäön prosessointimenetelmät.
Tässä jaksossa kuvattujen jarrutukseen ja vakionopeudensäätöön liittyvien ominaisuuksien lisäksi monet muutkin lisäominaisuudet hyödyntävät eteenpäin suunnattua tunnistusjärjestelmää. Jotkut yksinkertaisemmat järjestelmät antavat kuljettajalle ainoastaan varoituksen, jos auto poikkeaa nykyiseltä ajokaistaltaan. Tällöin kyseessä on kaistanpitoavustin eli kaistavahti.
Elektronisen ohjauksen (drive by wire) käyttöönoton myötä ohjauspyörän automaattiset säädöt voisivat käyttää eteenpäin suunnattujen anturien tuottamaa dataa, jotta ajoneuvo pysyisi omalla kaistallaan. Tätä voidaan kutsua kaistanpito- tai -keskitysjärjestelmäksi.
Tason 2+ järjestelmät, kuten Teslan Autopilot, voivat jopa ajaa itse. Ominaisuuden kiistanalaista nimeä pidetään kuitenkin harhaanjohtavana, mikä on yleisesti tiedossa. Tämä Wikipedia-sivu tarjoaa kattavasti taustatietoja ja lisälinkkejä.
Peruutuskamera
Ensimmäinen tunnettu esimerkki käyttöön otetusta peruutuskamerasta oli vuoden 1956 Buick Centurion -konseptiauto. Siinä oli auton taakse sijoitettu tv-kamera, jonka kuva näytettiin ohjaamoon sijoitetulla ruudulla, joka korvasi taustapeilin.

Kuva 3. Vuoden 1956 Buick Centurion -konseptiauto, jossa on peruutuskamera. Kuva: John Lloyd.
Huolimatta loistavasta ideasta kustannussyyt ilmeisesti estivät kameran täysimittaisen käyttöönoton. Itse asiassa järjestelmää ei koskaan pidetty täysin toimivana ratkaisuna käytännössä [Viite Unk213 \l 1033].
Ratkaisun myöhempi tunnettu käyttökohde oli vuoden 1972 Volvo Experimental Safety -auto, jota käytettiin testauksissa.
Toyota puolestaan oli ensimmäinen OEM-valmistaja, joka sijoitti peruutuskameran tuotantotason ajoneuvoon. Kyseessä oli vuoden 1991 Soarer Limited, joka oli saatavilla vain Japanissa. Vuoteen 1997 asti tuotannossa ollut järjestelmä hyödynsi värillistä näyttöä ja spoileriin asennettua CCD-kameraa.
Vuoden 2000 Nissan Infiniti -malli sisälsi peruutuskameran. Tämän järjestelmän LCD-näytöllä näkyvät värilliset viivat – Yhdysvalloissa vuonna 2001 saatavilla ollut optio – kertoivat arvioidun etäisyyden ruudulla näkyviin kohteisiin. Tämän lisäksi muitakin ratkaisuja kehiteltiin jälkimarkkinointiin.
Vuonna 2015 Cadillac toi tarjolle korkeaan resoluutioon ja laajaan näkökenttään yltävän peruutuskameran, jonka avulla kuljettaja pystyi näkemään kauemmaksi ajoneuvon taakse, jopa seuraaville kaistoille. Vuoteen 2017 mennessä sekä Subaru että Cadillac yhdistivät takakameran automaattiseen hätäjarrutukseen.
Joissakin ajoneuvoissa on myös yhdistetty ultraääni- tai lyhyen kantaman tutkaan lähestymisvaroituksia antava tunnistin, joka tarjoaa läheisistä kohteista lisätietoa kuvainformaation lisäksi tai varoittaa, jos jokin esine yllättäen lähestyy autoa.
Peruutuskameran käyttöönottoa ja lainsäädännön kehitystä vahvimmin ohjannut voima oli Cameron Gulbransenin tragedia Yhdysvalloissa. Vuonna 2002 kaksivuotiaan Cameronin loukkaantuminen tapaturmassa johti kuolemaan, kun hänen isänsä peruutti suurta maastoautoa pihatiellä [Viite Unk214 \l 1033].
Cameronista tuli tämän turvaongelman symboli. Seuraavan vuosikymmenen aikana käynnistyi sosiaalinen liike, joka johti lopulta lainmuutokseen USA:ssa. Uuden lain mukaan kaikissa 1. toukokuuta 2018 jälkeen valmistetuissa ajoneuvoissa on oltava vakiovarusteena peruutuskamera.
Kuolleen kulman varoitus
Sivupeilien kuolleen kulman varoittimen eli BSW-järjestelmän (Blind Spot Warning) keksijäksi tunnustettu Volvo esitteli vuonna 2003 informaatiojärjestelmän nimeltä BLIS [Viite Unk215 \l 1033], jota yhtiö kutsui kuolleen kulman tietojärjestelmäksi. BSW-järjestelmillä on useita erilaisia toteutustapoja. Ne voivat hyödyntää tutkaa, ultraääntä, kameroita tai näiden yhdistelmiä. Jotkut BSW-järjestelmät on voitu yhdistää hätäjarrutukseen, kaistavahtiin jne. riippuen ajoneuvosta ja tuetuista ADAS-ominaisuuksista. Monet järjestelmät ovat niinkin yksinkertaisia kuin sivupeiliin asennettu varoitusvalo.
Autoissa toisen kuolleen kulman muodostaa myös etuovien ja tuulilasin väliin sijoitettu pystypilari. BSW ei ratkaise kokonaan tätä ongelmaa, joka saattaa johtaa onnettomuuksiin. Vuonna 2019 vasta 14-vuotias tyttö Alaina Gassler keksi uudenlaisen ratkaisun, joka kuvataan tässä artikkelissa. Vaikka järjestelmä vaatii edelleen kehittämistä, hänen perusideansa saattaa ratkaista muutkin auton etupilarien aiheuttamat, näkyvyyttä haittaavat ongelmat.

Kuva 4. Pennsylvanian West Grovessa asuva Alaina Gassler voitti 25 000 dollarin palkinnon uudella kuolleen kulman ratkaisullaan. Kuva: CNN.
Gasslerin ratkaisussa käytetään videokameroita, jotka kuvaavat pilarien peittämät näkymät. Puuttuvat näkymät heijastetaan reaaliajassa projektoreilla pilarien sisäpintoihin. Ratkaisun yksityiskohdat käyvät ilmi tästä YouTube-videosta.

Kuva 5. Pysäytyskuva kuolleen kulman järjestelmää esittelevästä videosta.
Ratkaisun kekseliäisyydestä huolimatta tuotantotason ajoneuvoissa ei ole vielä otettu käyttöön tämän tyyppistä pilarijärjestelmää, mutta ehkä tulevaisuudessa tilanne saattaa muuttua. Toistaiseksi käytössä olevat järjestelmät hyödyntävät tutkaa ja/tai kameroita, jotka on aiemmin kuvattuun tapaan sijoitettu sivupeileihin.
Edistyksellinen ajovalojärjestelmä
Kehittyneet ajovalojärjestelmät (AFLS, Advanced Front Lighting System) voivat säätää ja moduloida ajovalojen voimakkuutta ja suuntaa vasteena ajoneuvon vaihteleviin nopeuksiin sekä tie- ja sääolosuhteisiin. Ajovalojärjestelmiin erikoistuneen Hella-yhtiön julkaisema YouTube-video antaa erinomaisen yleiskatsauksen siitä, mikä on mahdollista.
Varhaiset autojen sähköiset ajovalot, jotka tulivat käyttöön 1911, eivät sisältäneet kaukovaloja, ja lisäksi ne vaativat kuljettajaa nousemaan autosta sytyttääkseen ja sammuttaakseen valot. Cadillac tarjosi ensimmäisenä kojelautaan sijoitetun mekaanisen kytkimen vuonna 1915. Nämä varhaiset järjestelmät eivät olleet mukautettavissa, vaan tarjosivat ainoastaan valojen päälle/pois-kytkennän kiinteään suuntaan ja nousukulmaan [Viite Unk211 \l 1033].
Vastauksena tiettyjä valomääriä tietyissä olosuhteissa vaativiin määräyksiin keksittiin 1920-luvun puolivälissä kaksi hehkulankaa sisältävä ajovalopoltin, joka antoi mahdollisuuden käyttää sekä lähi- että kaukovaloja. Autonvalmistajat tarjosivat aluksi jalalla painettavan kytkimen uusien lamppujen ohjaamiseksi ja valojen vaihtamiseksi kauko- ja lähivalojen välillä. Monet autotehtaat ottivat käyttöön lähi- ja kaukovalojen automaattisen vaihtotoiminnon 1950- ja 1990-lukujen välillä hyödyntämällä anturia, joka havainnoi vastaantulevaa liikennettä.
Ensimmäistä kertaa jo 1930-luvulla Willys, Tucker ja muut valmistajat olivat ottaneet käyttöön mukautuvan ajovalojärjestelmän, joka koostui vasemman ja oikean puolen kiinteistä ajovaloista sekä niiden keskelle sijoitetusta kolmannesta valosta. Tämä ’kyklooppivalo’ oli mekaanisesti yhdistetty ohjauspyörään, joten se valaisi auton etualaa aina siihen suuntaan, mihin ohjauspyörää käännettiin [Viite Lau19 \l 1033].
1990-luvulle asti tärkeimmät ajovalojen innovaatiot olivat itse valaisintekniikassa. Halogeenivalot otettiin käyttöön ja sen jälkeen siirryttiin kaasupurkaus- eli HID-valoihin (High-Intensity Discharge) ja lopulta ledipohjaisiin valoihin 1990-luvulla. Ledit ovat paljon muita lamppuja energiatehokkaampia ja kestävät pitempään. Ledien odotetaan pysyvän myös tulevaisuudessa ajoneuvojen hallitsevana valolähteenä autojen kehittyessä.
Kalliimmissa autoissa alettiin hyödyntää elektronisesti mukautuvia ajovalojärjestelmiä 2000-luvulla. Ensimmäiset järjestelmät käyttivät pieniä askelmoottoreita valokeilan suuntaamiseen ja ohjainpiiriä yksittäisten ledien sammuttamiseen valikoivasti. Näistä järjestelmistä ollaan nyt siirtymässä täysin elektronisiin versioihin.
Toinen tähän liittyvä järjestelmä on nykyaikainen sade- ja valoanturimoduuli. Sade- ja valoanturit tunnistavat märän tuulilasin ja ohjaavat sen perusteella pyyhkimiä (sadetunnistin) sekä ajovaloja (valotunnistin), lähi- ja kaukovalot mukaan lukien. Jotkut yritykset ovat yrittäneet ottaa tämän toiminnon käyttöön myös kamerassa, mutta toistaiseksi on tehokkaampaa käyttää sade- ja valoanturimoduulia tähän toimintoon.
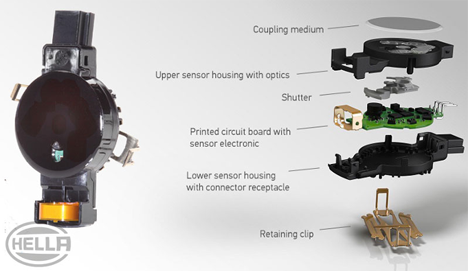
Kuva 6. Esimerkki sade- ja valoanturimoduulista. Kuva: Hella.
Rengaspaineiden valvonta
Yhdysvaltojen NHTSA-virasto harkitsi rengaspaineiden valvontajärjestelmiä eli TPMS-järjestelmiä (Tire Pressure Monitoring System) alun perin jo 1970-luvulla. Jo pitkään oli ymmärretty, kuinka tärkeää on käyttää oikein täytettyjä renkaita, mutta sopivaa automaatiojärjestelmää ei tuolloin ollut saatavissa. Lisäksi 1970-luvulla Indianan yliopiston julkaisemassa tutkimuksessa todettiin, että alipaineiset renkaat aiheuttivat 1,5 % onnettomuuksista jarrutehon ja ajettavuuden heikentymisen vuoksi. Rengasfirma Goodyear havaitsi saman asian myös riippumattomassa tutkimuksessa [GMi16 \l 1033].

Kuva 7. Esimerkki TPMS-moduulista. Kuva: CARiD.
1970-luvun lopun polttoainekriisin aikaan kysymys rengaspaineiden valvonnasta nousi uudelleen esiin, mutta tällä kertaa enemmänkin polttoaineenkulutuksen kuin turvallisuuden vuoksi. Oikein täytetyt renkaat olisivat lisänneet ajokilometrejä keskimäärin 3-4% tuolloin tiellä liikkuneilla ajoneuvoilla.
1980-luvun alussa TPMS-tekniikka oli parantunut, muttei ollut vieläkään kovin tarkkaa tai luotettavaa. Kustannukset olivat myös korkeat, jopa 200 dollaria ajoneuvoa kohden, mikä hillitsi käyttöönottoa taantuman aikana (200 dollaria vuonna 1970 vastaisi tänä päivänä yli 1400 dollaria tämän laskurin mukaan).
Ensimmäinen ajoneuvo, jossa oli mukana TPMS-järjestelmä, oli vuoden 1987 Porsche 959. Tässä superluokan autossa oli monia edistyksellisiä ominaisuuksia, jotka olivat ainutlaatuisia jopa huippuluokan automalleissa. Ensimmäisen TPMS-järjestelmän lisäksi siinä oli myös lukkiutumattomat jarrut, hydrauliset iskunvaimentimet (kallistuksenvakainten sijasta), automaattinen jousituksen säätö, elektroninen maavaran ja iskunvaimennuksen säätö ja muita edistyksellisiä ominaisuuksia [Viite Huf12 \l 1033].
Porsche 959 oli myös ensimmäinen ajoneuvo, jossa käytettiin runflat-renkaita, jotka vaativat rengaspaineiden valvontaa. Runflat-rengas toimii kohtalaisesti myös tyhjänä, joten kuljettaja ei välttämättä heti huomaa sen tyhjenemistä. Tyhjentynyt rengas aiheuttaa tietysti kuljettajalle merkittävän lisävaaran varsinkin suorituskykyisissä autoissa, joilla voidaan ajaa erittäin suuria nopeuksia.

Kuva 8. Porsche 959. Kuva: CARiD.
Rengaspaineiden valvonta oli Chevrolet Corvetten vakio-ominaisuus vuodesta 1999 lähtien. Siinäkin käytettiin runflat-renkaita, jotka vaativat TPMS-järjestelmän. Tämän debyytin jälkeen käyttöönotto alkoi yleistyä myös tavallisemmissa ajoneuvoissa.
Ilmeisesti käyttöönoton laajaan yleistymiseen johti erityisesti Yhdysvaltojen hallituksen vuonna 2000 laatima TREAD-laki (Tire Recall Enhancement, Accountability and Documentation). Laki oli seurausta laajasta kiistasta, joka koski Fordin Explorer-automallia ja Firestonen renkaita.
Ilmeisesti Ford Explorerissa oli tunnettuja vakausongelmia, jotka korjattiin käyttämällä Firestonen renkaita alipaineisina ajoneuvon uudelleensuunnittelun sijaan. Valitettavasti myös renkaissa oli suunnitteluongelmia, minkä vuoksi tuhansia autoilijoita loukkaantui ja satoja ihmisiä kuoli renkaiden räjähdyksistä aiheutuneiden ulosajojen ja kaatumisonnettomuuksien seurauksena.
TREAD-laki vaatii, että ajoneuvon jokaisen pyörän TPMS-yksikkö ilmoittaa kuljettajalle ilmenevästä viasta ja järjestelmä suorittaa itsetarkistuksen aina auton käynnistyksen yhteydessä. Omistajan käsikirjaan on myös liitettävä tähän kuuluva dokumentaatio. Syyskuun alusta 2007 alkaen kaikissa alle 10000 paunaa (= 4536 kg) painavissa ajoneuvoissa on oltava tämä järjestelmä [Viite Unk21 \l 1033].
Kuluneiden 15 vuoden jälkeen alkaa olla harvinaista kohdata Yhdysvaltojen teillä ajoneuvoa, jossa ei ole TPMS-järjestelmää. Useat muutkin maat vaativat nykyään tätä järjestelmää uusilta ajoneuvoilta ja siitä on tullut vakioturvaominaisuus maailmanlaajuisesti.
Lopuksi
Tässä artikkelissa on käsitelty törmäykseneston, automaattisen hätäjarrutuksen, kuolleen kulman varoituksen, edistyksellisten ajovalojen ja rengaspaineiden valvonnan tekniikoita ja historiaa.
Seuraavassa, sarjan viimeisessä artikkelissa käsittelyvuoroon tulevat kuljettajan ja matkustajien valvonta, ympäristön havainnointi ja V2x-tiedonsiirto. Jaksossa käsitellään ratkaisuja ohjelmallisesti määritetyistä ajoneuvoista ja täydellisestä digitalisoinnista. Lopuksi esitellään lisätyn todellisuuden, virtuaalitodellisuuden ja niiden muodostaman metaversumin tarjoamat ratkaisut sekä niihin liittyvien trendien vaikutukset tulevaisuuden autoihin.
Viitteet
Blackstone, S. (2012, August 28). Business Insider. Retrieved from Adaptive Cruise Control Will Change Driving In America: https://www.businessinsider.com/how-adaptive-cruise-control-will-change-driving-in-america-2012-8
G, M. (2016, April 29). CARiD. Retrieved from What is The History of Tire Pressure Monitoring Systems?: https://www.carid.com/articles/what-is-history-of-tire-pressure-monitoring-systems.html
Huffman, J. P. (2012, October 24). Road and Track. Retrieved from Porsche 959: Yesterday’s Tomorrow: https://www.roadandtrack.com/new-cars/car-technology/news/a18695/porsche-959-yesterdays-tomorrow/
Kingston, L. (2018, June 11). Piston Heads. Retrieved from PH Origins: Autonomous emergency braking: https://www.pistonheads.com/features/ph-features/ph-origins-autonomous-emergency-braking/38171
Laukkonen, J. (2019, November 27). Lifewire. Retrieved from Adaptive Headlights See Around Corners: https://www.lifewire.com/what-are-adaptive-headlights-534820
Unknown. (2021, October 21). Cameron Gulbransen. Retrieved from Kids and Cars: https://www.kidsandcars.org/child_story/cameron-gulbransen/
Unknown. (2021, October 21). Lovering Volvo Cars Nashua. Retrieved from Blind Spot Information System: https://www.loveringnashua.com/blind-spot-information-system.htm
Unknown. (2021). Schrader TPMS Solutions. Retrieved from Everything you Need to Know About the TREAD Act: https://www.schradertpms.com/en/driver-education/everything-you-need-know-about-tread-act
Unknown. (2021). The Retrofit Source. Retrieved from The History of Automotive Headlights: https://blog.theretrofitsource.com/the-history-of-automotive-headlights-retrofit-source
Unknown. (2021, October 21). Wikipedia. Retrieved from Backup Camera: https://en.wikipedia.org/wiki/Backup_camera
















 Tekoäly on jo selkeästi ohittanut kokeiluvaiheen. Avnet Insights 2026 -selvityksen mukaan tekoäly on monilla elektroniikan aloilla jo mukana käytössä olevissa tuotteissa, ja sen soveltaminen yleistyy nopeasti kaikkialla EMEA-alueella.
Tekoäly on jo selkeästi ohittanut kokeiluvaiheen. Avnet Insights 2026 -selvityksen mukaan tekoäly on monilla elektroniikan aloilla jo mukana käytössä olevissa tuotteissa, ja sen soveltaminen yleistyy nopeasti kaikkialla EMEA-alueella.