











 Lidarien eli valotutkien tekniikkaa käsittelevän artikkelin toisessa osassa esitellään käytettyjen laserin tyyppejä ja tekniikkaa. Laserien kustannukset ja piirien tarjonta määräävät lopulta, mitkä lidarit menestyvät markkinoilla.
Lidarien eli valotutkien tekniikkaa käsittelevän artikkelin toisessa osassa esitellään käytettyjen laserin tyyppejä ja tekniikkaa. Laserien kustannukset ja piirien tarjonta määräävät lopulta, mitkä lidarit menestyvät markkinoilla.
|
Artikkelin kirjoittaja Bahman Hadji toimii liiketoiminnan kehittäjänä onsemin autoelektroniikan anturien divisioonassa. |
Fotonien tuottamiseen liittyy täysin erilainen prosessi. Puolijohde-P-N-liitosta vahvistusväliaineena voidaan käyttää laserin toteutukseen. Tämä tapahtuu pumppaamalla virtaa liitoksen läpi, mikä aiheuttaa fotonien resonanssiemission, kun atomit menevät alemmille energiakaistoille. Tämä johtaa koherentin lasersäteen muodostumiseen.
Puolijohdelaserit perustuvat suorien kaistaero- eli bandgap-materiaaleihin, kuten GaAs ja InP, jotka ovat tehokkaita fotonien synnyttämisessä. Fotonit syntyvät, kun atomit menevät alemmalle energiakaistalle, toisin kuin epäsuorissa bandgap-materiaaleissa kuten pii.
Lidarissa käytetään kahta laserin päätyyppiä: reunaa emittoiva laser (EEL) ja vertikaalisesta ontelopinnasta emittoiva laser (VCSEL). EEL-lasereita käytetään nykyään laajemmin niiden alhaisempien kustannusten ja korkeamman tehokkuuden vuoksi. Niitä on kuitenkin vaikeampi pakata ja rakentaa ryhmiksi, ja ne kärsivät aallonpituuden muutoksista lämpötilan muuttuessa, minkä vuoksi ilmaisimien on etsittävä laajempaa fotonien aallonpituuksien kaistaa. Tällöin ilmaisin havaitsee myös enemmän ympäristön fotoneita kohinana.
Korkeammista kustannuksista ja alhaisemmasta hyötysuhteesta huolimatta uudemman VCSEL-tekniikan etuna on helppo ja tehokas kotelointi, koska säde synnytetään ylhäältä. VCSEL:n käyttö markkinoilla lisääntyy, kun sen kustannukset laskevat edelleen merkittävästi ja tehokkuus paranee. EEL- ja VCSEL-lasereita on molempia sekä NIR- että SWIR-aallonpituuksien luomiseen, mutta keskeisenä erona on se, että NIR-aallonpituuksia voidaan tuottaa GaAs:laserilla, kun taas SWIR-aallonpituudet edellyttävät InGaAsP:n käyttöä. GaAs-laserit pystytään valmistamaan sopimusvalmistajien linjoilla suuremmilla kiekoilla, mikä johtaa alhaisempiin kustannuksiin. Tämä osoittaa NIR-alueen lidar-valmistajien ekosysteemin edun sekä kustannusten, että toimitusketjun turvallisuuden näkökulmasta.
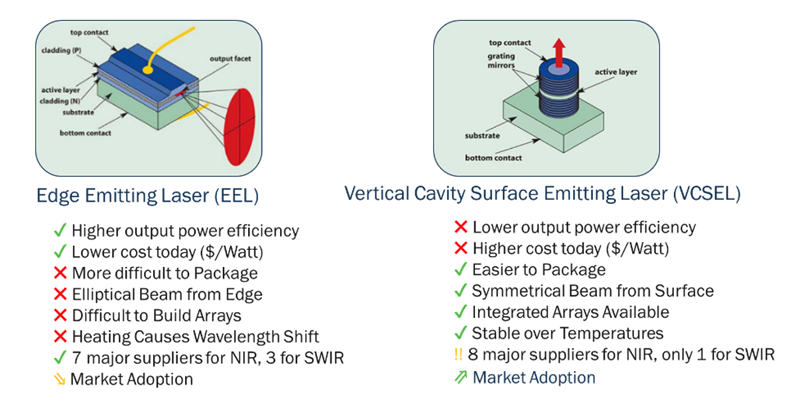
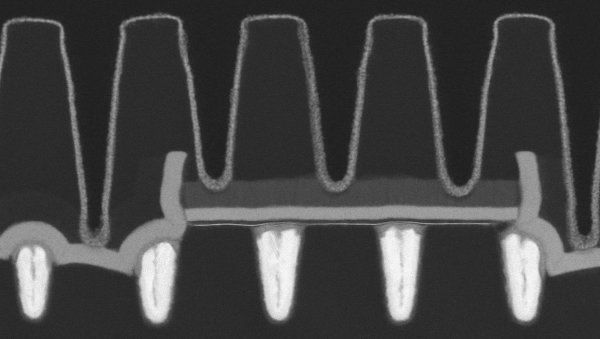
Kuva 5: Erilaisia lidareissa käytettyjä laserien tyyppejä.
Laserin teho ja silmän turvallisuus
Kun puhutaan käytetyistä aallonpituuksista, on välttämätöntä ottaa huomioon lidar- järjestelmän riskit silmän turvallisuuden kannalta. Pitää muistaa, että dToF-tyyppisen lidarin konsepti sisältää lyhyiden laserpulssien käyttämisen korkealla huipputeholla tietyssä kuvakulmassa lähetettäväksi näkymään. Lidarin säteilypolun tiellä seisovan jalankulkijan on oltava varma siitä, että hänen suuntaansa ammuttava laser ei vahingoita hänen silmiään.
IEC-60825 on standardi, joka määrää, kuinka suurelle valomäärälle silmä voi altistua eri aallonpituuksilla. NIR-valo on samanlaista kuin näkyvä valo, ja se pystyy kulkemaan sarveiskalvon läpi ja saavuttamaan verkkokalvon ihmissilmässä. SWIR-taajuuksilla valo absorboituu enimmäkseen sarveiskalvon sisällä, ja sen seurauksena silmään voidaan kohdistaa korkeampia tasoja.
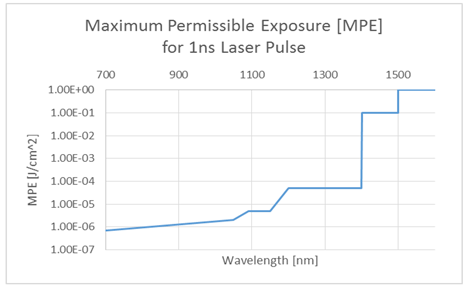
Kuva 6: Silmälle turvallisen altistumisen määriä IEC-60825 -standardin mukaan.
Mahdollisuus tuottaa useita suuruusluokkaa suurempi laserteho on etu 1550 nanometrin laseriin perustuvalle järjestelmälle suorituskyvyn näkökulmasta, koska se mahdollistaa suuremman fotonimäärän lähettämisen ja siten palauttamisen havaittavaksi. Tämän vastapainona suuremmat lasertehot tuottavat enemmän lämpöä. On huomattava, että oikea silmäturvallinen suunnittelu on tehtävä aallonpituudesta riippumatta ottamalla huomioon lähetetty energiamäärä pulssia kohti ja laseraukon koko. 905 nanometrin laseriin perustuvalla lidarilla huipputehoa voidaan lisätä jommallakummalla tavalla, kuten alla olevasta kuvasta 7 näkyy.
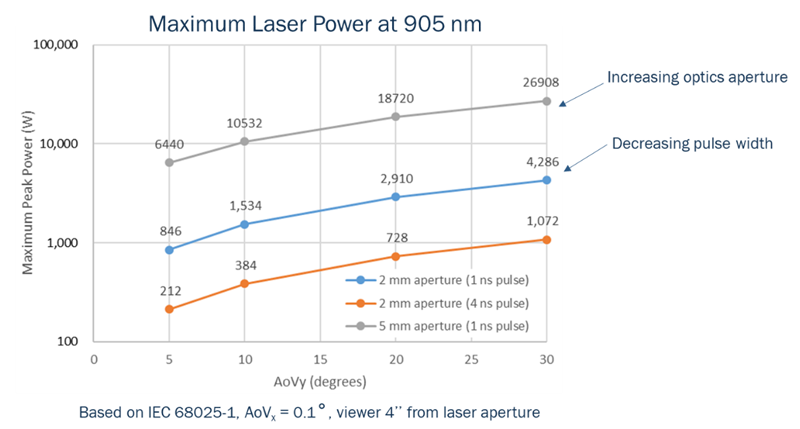
Kuva 7: Silmäturvallisen laserin suunnittelu NIR-alueen lidaria varten eri optiikan ja laserin parametreilla.
NIR- ja SWIR-alueen lidar-järjestelmien vertailu
Kysymys käytetystä lasertehosta tuo meidät takaisin käytettävien antureiden valintaan. Suorituskykyisempi anturi, joka pystyy havaitsemaan heikompia signaaleja, hyödyttää selvästi järjestelmää monin tavoin: sillä se pystyy saavuttamaan pidemmän kantaman tai käyttämään pienempää lasertehoa saman kantaman saavuttamiseksi. Onsemi on kehittänyt sarjan SiPM-piirejä eli piipohjaisia fotonitoistimia NIR-alueen lidaria varten. Piirit kasvattavat fotonien havaitsemistehokkuutta (PDE), mikä on herkkyyttä ilmaisun avain parametri. Uusimmilla RDM-sarjan antureilla ylletään markkinoiden johtavaan 18 prosentin lukemaan.
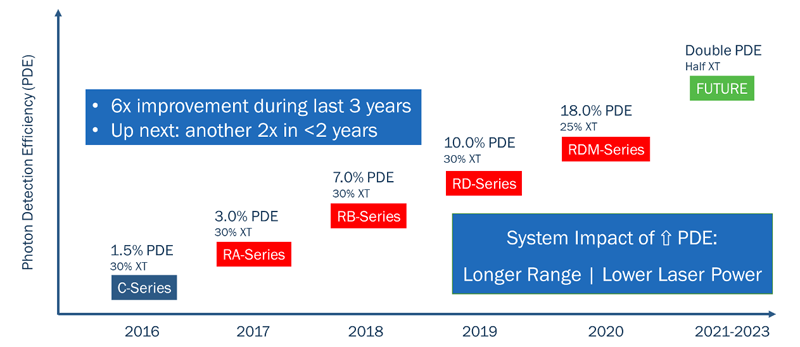
Kuva 8: Onsemin SiPM-piirien prosessien kehityssuunnitelma.
Vertaillaksemme NIR- ja SWIR-alueen dToF-tyypisten lidarien suorituskykyä teimme järjestelmämallinnuksen identtisille lidar-arkkitehtuureille ja ympäristöolosuhteille erilaisilla laserien ja antureiden parametreilla. Lidar-arkkitehtuuri on koaksiaalinen järjestelmä, jossa on 16-kanavainen ilmaisinryhmä ja skannausmekanismi, joka hajautuu näkökentän poikki, kuten alla olevassa kuvassa 10 näkyy. Tämä järjestelmämalli on validoitu laitteistolla, ja sen avulla voimme arvioida tarkasti lidar-järjestelmien suorituskykyä.
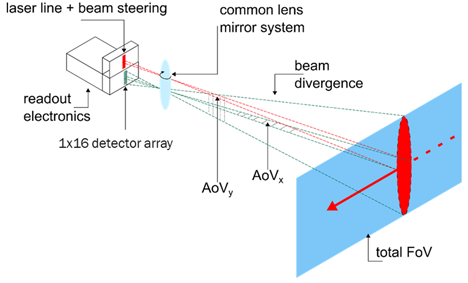
Kuva 9: Lidarin dToF-anturin järjestelmämalli.
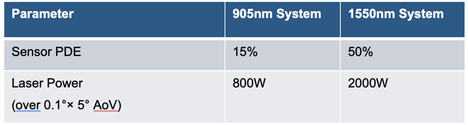
Taulukko 2: Lidar-anturin ja -laserin parametrit NIR- ja SWIR-alueen järjestelmien simuloinnissa.
1550 nm:n järjestelmä käyttää suurempaa lasertehoa sekä korkeampaa PDE-anturia, koska niissä käytetään korkean PDE:n InGaAs-seoksia, joiden pitäisi tuottaa parempi suorituskyky järjestelmäsimulaatiossamme. Käyttämällä järjestelmätason parametreja 100 kiloluxin ympäröivässä valossa, joka on suodatettu 50 nanometrin kaistanpäästöllä anturin linssissä (keskitetty noin 905 nm ja 1550 nm), 0,1° x 5° kuvakulma skannattu yli 80° vaakasuunnassa 30 fps nopeudella, 500 kHz lasertoistolla, 1 nanosekunnin pulssinleveydellä ja 22 millimetrin linssinhalkaisijalla, tulokset näkyvät alla.
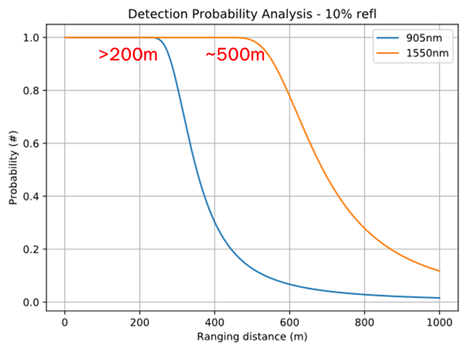
Kuva 10: 905 ja 1550 nanometrin lasereihin perustuvien lidar-järjestelmien simuointitulokset.
Odotetusti 1550 nm:n järjestelmä pystyy kuvantamaan vähän heijastavaa kohdetta 500 metriin asti 99 prosentin todennäköisyydellä. 905 nanometrin laseriin perustuva järjestelmä yltää kuitenkin reilusti yli 200 metrin päähän, mikä osoittaa, että molemmat järjestelmätyypit voivat täyttää autojen pitkän kantaman lidar-vaatimukset tyypillisissä ympäristöolosuhteissa. Huonoissa ympäristöolosuhteissa kuten sateessa tai sumussa SWIR-valon vedenabsorptio-ominaisuuksien vuoksi sen suorituskyky heikkenee nopeammin kuin NIR-pohjaisen järjestelmän. Tämä on toinen huomioon otettava tekijä järjestelmää suunniteltaessa.
Entäpä ne kustannukset?
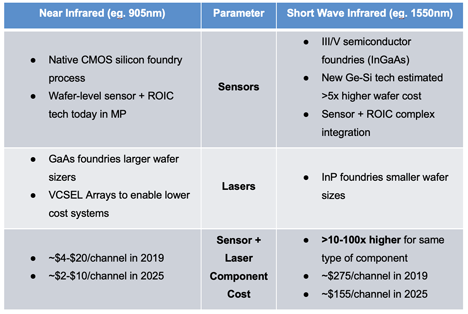
Kun olemme tarkastelleet lidar-järjestelmien takana olevaa tekniikkaa sekä eri aallonpituuksien käytön vaikutuksia, palaamme nyt kustannusnäkökohtiin. Selitimme aiemmin, että NIR-pohjaisissa lidar-suunnitteluissa käytettävät anturit ovat peräisin CMOS-sopimusvalmistajen linjoilta, mikä mahdollistaa puolijohteiden alhaisimmat kustannukset. Lisäksi ne mahdollistavat myös CMOS-lukulogiikan integroinnin anturin kanssa yhdeksi siruksi käyttämällä pinottua rakennetta. Tämä alentaa edelleen merkittävästi kustannuksia.
Sitä vastoin SWIR-anturit käyttävät III/V-puolijohteita kuten InGaA:ita, jotka ovat kalliimpia, ja uutta hybridi Ge-Si-tekniikkaa (germanium-pii), joka saattaa mahdollistaa edullisemmat SWIR-anturit. Näidenkin arvioidaan olevan yli 5 kertaa kalliimpia kuin perinteisten CMOS-anturien. Laserpuolella NIR-järjestelmissä lasersirujen valmistukseen käytettyjen GaAs-kiekkojen ja SWIR-järjestelmien lasersirujen valmistukseen käytettyjen InGaAs-kiekkojen välinen kokoero johtaa kustannuseroihin. VCSEL-laserin myös NIR-järjestelmissä on polku edullisempiin toteutuksiin.
Yllä olevien tekijöiden takia tutkimuslaitos IHS Markit on arvioinut, että saman tyyppisen komponentin (anturi tai laser) SWIR-järjestelmän hinta olisi 10-100 kertaa korkeampi kuin NIR-järjestelmä. NIR-järjestelmän anturin ja laserin keskimääräisen yhdistetyn komponenttihinnan arvioitiin olevan 4-20 dollaria kanavaa kohden vuonna 2019. Vuoteen 2025 mennessä keskihinnan pitäisi laskea 2-10 dollariin.
SWIR-järjestelmän vastaavan keskimääräisen komponenttihinnan arvioitiin olevan olla 275 dollaria kanavaa kohden vuonna 2019 ja laskevan 155 dollariin kanavaa kohden vuoteen 2025 mennessä. Tämä on valtava kustannusero, kun otetaan huomioon, että lidar-järjestelmät sisältävät useita kanavia. Vaikka käytettäisiin 1D-skannauslähestymistapaa, hintaero on suuri, koska skannauksessa vaaditaan pystysuora yksipistekanavien joukko.
Taulukko 3: Kustannustekijöiden yhteenveto (Lähde: IHS Markit).
Lidar-markkinoiden dynamiikka ei myöskään suosi SWIR-leiriä. Autonomisen ajamisen markkinat eivät ole kasvaneet niin nopeasti kuin odotuttiin viisi vuotta sitten, ja tason 4 ja tason 5 autonomiajärjestelmät, joilla lidar on pakollinen, ovat vuosien päässä laajasta massakäytöstä. Lidaria käyttävät teollisuus- ja robotiikkamarkkinat ovat entistä kustannustietoisempia eivätkä ne tarvitse SWIR-järjestelmän huipputehokkaita etuja, joten näillä valmistajilla ei ole mahdollisuuksia alentaa komponenttikustannuksia volyymejä kasvattamalla. Kyse on vanhasta "muna ja kana" -ongelmasta: kustannukset alenevat, kun volyymi kasvaa, mutta tarvitaan alhaisemmat kustannukset volyymien saamiseksi.
Yhteenveto
On selvää, miksi suurin osa nykyisistä lidar-järjestelmistä käyttää NIR-aallonpituuksia. Vaikka tulevaisuutta ei koskaan tiedetä varmasti, on ilmeistä, että ekosysteemitoimittajien kustannukset ja saatavuus ovat avaintekijöitä, ja NIR-pohjaiset järjestelmät ovat varmasti aina halvempia CMOS-piin teknologiaedun ja mittakaavaetujen ansiosta. Ja vaikka SWIR mahdollistaa pidemmän kantaman lidar-järjestelmän, NIR-pohjaiset valotutkat voivat myös saavuttaa halutut autojen pitkän kantaman vaatimukset samalla, kun ne toimivat erittäin hyvin lyhyen ja keskipitkän kantaman kokoonpanoissa, joita tarvitaan myös ADAS-järjestelmissä ja robottiajossa.
NIR-pohjaisten lidarien massatuotanto osoittaa, että tekniikka on kaupallistettu ja hyväksi havaittu, mutta kestää vielä jonkin aikaa, ennen kuin voittaja on selvillä. Pitää muistaa, että autoteollisuudessa oli 1900-luvun vaihteessa 30 eri valmistajaa, ja määrä nousi seuraavan kymmenen vuoden aikana lähes 500:een, mutta kesti vain muutaman vuoden jotta suurin osa niistä hävisi. On odotettavissa, että jotain samanlaista voi tapahtua lidar-valmistajien kanssa tämän vuosikymmenen loppuun mennessä.
Viitteet
Yole Développement (2020). LiDAR for Automotive and Industrial Applications - Market and Technology Report 2020
Amsrud, P. (2019 September 25). The race to a low cost LIDAR system [Conference Presentation]. Automotive LIDAR 2019, Detroit, MI, United States. IHS Markit.
Nick84 (2013) CC BY-SA 3.0 <https://creativecommons.org/licenses/by-sa/3.0>, via Wikimedia Commons
















 Tekoäly on jo selkeästi ohittanut kokeiluvaiheen. Avnet Insights 2026 -selvityksen mukaan tekoäly on monilla elektroniikan aloilla jo mukana käytössä olevissa tuotteissa, ja sen soveltaminen yleistyy nopeasti kaikkialla EMEA-alueella.
Tekoäly on jo selkeästi ohittanut kokeiluvaiheen. Avnet Insights 2026 -selvityksen mukaan tekoäly on monilla elektroniikan aloilla jo mukana käytössä olevissa tuotteissa, ja sen soveltaminen yleistyy nopeasti kaikkialla EMEA-alueella.