










 Ethernet-standardiin saatavissa olevat aikakriittisen verkon laajennukset antavat laitevalmistajille ja integraattoreille mahdollisuuden käyttää nopeaa verkkoa reaaliaika- ja suoratoistosovelluksissa. Ethernet-verkon paikallisaika saadaan puristettua alle mikrosekuntiin, esittää Toshiba Electronics Europe artikkelissaan.
Ethernet-standardiin saatavissa olevat aikakriittisen verkon laajennukset antavat laitevalmistajille ja integraattoreille mahdollisuuden käyttää nopeaa verkkoa reaaliaika- ja suoratoistosovelluksissa. Ethernet-verkon paikallisaika saadaan puristettua alle mikrosekuntiin, esittää Toshiba Electronics Europe artikkelissaan.
Autoteollisuuden ja teollisuusautomaation aloja yhdistää nykyisin yksi yhteinen piirre, nimittäin nopeasti tapahtunut digitalisaatio, mitä tehokkaiden puolijohteiden saatavuus on edesauttanut. Tekoäly ja koneoppiminen ovat tuoneet lisää toiminnallisuutta perinteisiin käyttötoimintoihin. Monien näiden arkkitehtuurien pääominaisuutena on niissä käytettävä hajautettu älykkyys ja hallintatoiminnot, jotka edellyttävät kykyä siirtää suuria määriä dataa paitsi nopeasti myös ennakoitavasti.
Autoalalla hajautetun älykkyyden suunnittelussa tärkeänä suuntauksena on vyöhykearkkitehtuurien (zonal architectures) lisääntyvä käyttö. Sen sijaan että käytetään spesifisiin toimintoihin erityisiä elektronisia ohjausyksikköjä (ECU), jotka yhdistetään toisiinsa käyttäen ethernetiä tai perinteistä kenttäväylää kuten CAN, pyrkivät ajoneuvovalmistajat yhdistämään sovelluksia kokonaisuuksiksi vähemmälle määrälle tehokkaita SoC-piirejä, joilla voidaan suorittaa monia sovelluksia.
Vyöhykearkkitehtuureissa kunkin sovelluksen toteutuksessa tarvittavat tehtävät hajautetaan SoC-piireille. Esimerkiksi tallentava solmu voi tallentaa sekä laitedataa ajoneuvon toiminnoista ja liikkeistä että multimediasisältöä, mitä autossa olijat haluavat katsoa tai kuunnella matkan aikana. Vyöhykkeiden yhdyskäytävät välittävät kaiken tietoliikenteen, mikä vahvistaa turvallisuutta eri sovellusten välillä siten, että tietoviihdesovelluksilla ei ole pääsyä moottorin, ohjauksen tai jarrujärjestelmien hallintatoimintoihin.
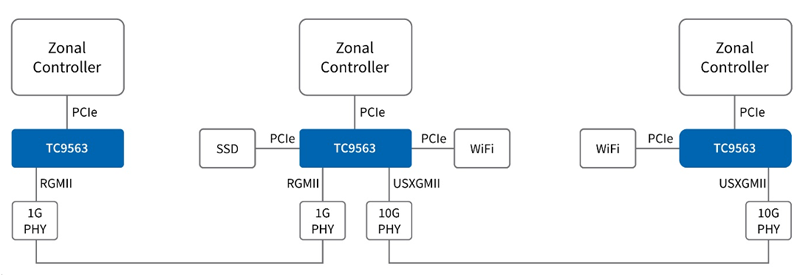
Kuva 1: Ajoneuvototeutuksissa yksi ohjainlaitteista on liitetty SSD-levyyn, jota käytetään emuloimaan ajoneuvon sisällä olevan langattoman massamuistielementin toimintaa.
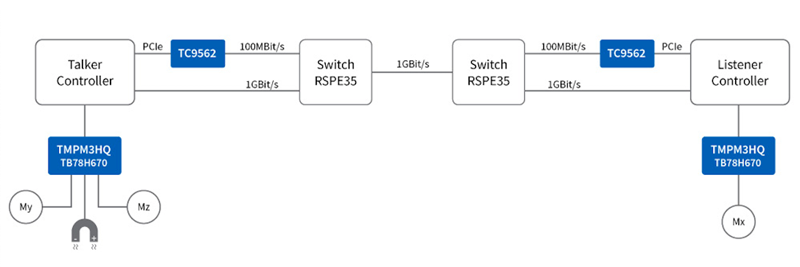
Kuva 2: Teollisuussovellustoteutuksissa arvioidaan toimintojen laatua ja varmistetaan työkalun työstöpään oikea kohdistus.
Samanlainen arkkitehtuuri on yleistymässä myös teollisuusjärjestelmissä. Sen sijaan että kukin itsenäisenä yksikkönä toimiva työstökone kommunikoisi muiden kanssa kapeakaistaisen kenttäväylän kuten Profibusin kautta, koneet yhdistetään toisiinsa suuren datanopeuden ethernetillä. Tällöin on mahdollista lähettää video- ja muuta runsaasti tietoa sisältävää ns. dataa (rich data) verkon reunalla oleville edge-tietokoneille käsiteltäväksi. Edge-tietokoneella ajettava tekoälysovellus pystyy päättelemään nopeasti, toimiiko työstökone oikein tai pitääkö tehdä muutoksia lämpötilan tai muiden olosuhteista johtuvien muutosten kompensoimiseksi.
Vyöhykearkkitehtuureissa on haasteellista taata se, että hajautetut toteutukset pystyvät ylläpitämään reaaliaikaista suorituskykyä. Teollisuusautomaatiossa säätösilmukat on tyypillisesti suunniteltu vastaanottamaan antureilta tulevia päivityksiä vakionopeudella. Vaarana on epävakaisuuden lisääntyminen ja erittäin tärkeän paikkatiedon tarkkuuden väheneminen, jos säätöalgoritmien odottamat päivitykset ja anturitiedot viivästyvät käsittelyn edellyttämän aikaikkunan ulkopuolelle. Kone on tällöin pakotettu käyttämään dataa, joka ei ole enää todennäköisesti ajankohtaista eikä enää edusta reaalista todellisuutta.
Ennakoimattomat viivästymiset vaikuttavat myös käyttäjän kokemukseen autoympäristössä. Datavirrat voivat häiriintyä keskenään siten, että matkustajat autossa joutuvat katsomaan pätkivää videota. Ja yleisenä havaintona on se, että järjestelmä ei pysy ajan tasalla.
Eräs ratkaisu on lisätä liikkumavaraa siirtymällä käyttämään entistä nopeampia ethernet-versioita. Tämä kuitenkin osoittautuu yleensä riittämättömäksi toimenpiteeksi. Ongelman ydin on perus-ethernet-standardin best effort -velvoitteessa: jokaisella vertaisverkon toimintayksiköllä, jolla on valmis paketti lähetettäväksi, on oikeus päästä verkkoon ja pysäyttää muut toiminnot kyseisellä verkkosegmentillä siksi ajaksi, kun lähetys on suoritettu loppuun. Tämä arkkitehtoninen lähestymistapa on perua monien perinteisten ethernet-ohjausyksiköiden suunnitteluista. Niissä on käytetty yksinkertaisia jonotuspuskureita odottamaan paketteja, jotka eivät liikennöintityypiltään eroa toisistaan. Suuren prioriteetin käsky lyhyeen pakettiin kapseloituna voidaan helposti pakottaa odottamaan yhden tai useamman pitkähkön videokehyksen lähettämistä ennen kuin sen verkkoon pääsy sallitaan. Toshiba on tutkinut tämän tyyppistä käyttäytymistä referenssialustalla tarkoituksenaan saada selville, miten auto- ja teollisuusjärjestelmien sovelluksiin vaikuttaa ennustamattomien ilmiöiden ilmaantuminen verkoihin.
Toshiban suunnittelijoiden tekemässä testipenkissä sekä 1 Gb/s:n että 10 Gb/s:n verkkoliitännöillä varustetuista nopean ethernetin ohjausyksiköistä kukin on yhdistetty isäntänä toimivaan SoC-piiriin, joilla suoritettavat sovelluskoodit simuloivat erilaisten odotettavissa olevien käyttötilanteiden käyttäytymismalleja auto- ja teollisuusautomaatioympäristöissä.
Toshiban suorittamat testit referenssisuunnitteluilla ovat osoittaneet, miten perinteistä IEEE 802.1 -protokollaa sovellettaessa seurauksena voi olla, että pieni prosenttiosuus niistä paketeista, jotka on välttämättä ennakoivasti pystyttävä välittämään, voivat viivästyä niin merkittävästi, että reaaliaikaisten sovellusten suorittaminen häiriintyy vakavasti. Tapauksissa, joissa vähemmän kriittinen liikenne kuluttaa suhteellisen vähän - vähemmän kuin 1 Mb/s:ä 1 Gb/s:n verkossa - kaistanleveyttä, enemmän kriittisen liikenteen kuten moottorin ohjauksen käskyjä kuljettava paketin etenemisviiveeksi mitattiin enimmillään 60 µs kokeilussa, jossa paketit siirtyivät lähettäjältä vastaanottajalle kolmella hypyllä kahden kytkimen läpi. Suurilla määrillä vähäisen prioriteetin taustaliikennettä kulutettaessa kaistaa enimmillään 840 Mb/s suurin etenemisviive kasvoi yli seitsenkertaiseksi 440 mikrosekuntiin.
Etenemisviiveiden leviäminen osoittautui hyvin kaksipiippuiseksi asiaksi näissä olosuhteissa ja useisiin paketteihin kohdistui yli 300 µs:n viiveitä, vaikkakin suuri osa saavutti määränpäänsä alle 60 mikrosekunnissa. Näiden viiveiden vaikutuksia testattaessa teollisuuden näkökulmasta, jolloin ohjelmoimalla asetettua viimeistä saapumisaikaa myöhemmin saapumassa olleet paketit hylättiin sen sijaan, että niitä olisi hyödynnetty potentiaalisena virhedatana säätösilmukassa, tuloksena oli epäonnistuminen pyrkimyksessä saavuttaa tasainen siirtyminen ja ohjelmoidut kohdesijainnit.
Ethernet-standardiin saatavissa olevat aikakriittisen verkon (TNS) laajennukset antavat laitevalmistajille ja integraattoreille mahdollisuuden käyttää nopeaa verkkoa reaaliaika- ja suoratoistosovelluksissa. Tällaisia standardeja ovat IEEE 802.1AS, Generalized Precision Time Protocol (gPTP), joka määrittelee ethernetin ajastus- ja synkronointikäytännöt TNS-ympäristössä, ja IEEE 802.1Qbv, joka määrittelee laajennukset liikenteen lähettämisen sallimiseksi tiukan aikataulun mukaisesti.
Standardin gPTP mukaisesti ethernet-verkon päätelaitteet voivat sopia yhteisestä paikallisajasta alle mikrosekunnin tarkkuudella ja pitää huolta, että niitä yhdistävän verkon etenemisviiveet pitävät kutinsa. Yhteisen aikareferenssin ansiosta gPTP mahdollistaa ajasta riippuvan muotoilun ja pakettien aikataulutuksen käytön kriittisten pakettien jakamiseksi tietyssä aikakehyksessä.
IEEE 802.1Qbv:n mukainen ajasta riippuva vaiheittainen ohjaus erottelee siirtoikkunoita kiinteämittaisiksi jaksoiksi. Kullekin jaksolle voidaan allokoida eri aikaviipaleita yhdelle tai useammalle kahdeksasta IEEE 802.1Q:n prioriteettitasosta ja noille tasoille kohdistetuille paketeille annetaan yksinoikeus verkon käyttöön tuon aikaikkunan pituuden ajaksi.
Toshiban testipenkki käsittää ethernet-ohjausyksiköitä, joiden gPTP:n ja IEEE 802.1Qbv:n mukaisten toimintojen avulla on mahdollista tarkkailla näiden tekniikoiden vaikuttavuutta tyypillisiin auto- ja teollisuusohjelmistoilla suoritettaviin tehtäviin. Kun eräässä perinteisten protokollien mukaisessa kokoonpanossa etenemisviive vaihteli 50 mikrosekunnista 430:een, saatiin aikakriittisten gPTP:n ja IEEE 802.1Qbv:n ominaisuuksia käyttävien pakettien jakautumista pienennettyä paljon kapeammaksi normaalijakaumaksi, jonka keskuksena on 25,5 µs ja värinä (jitter) ainoastaan 0,3 µs. Tällöin kaikille työstökoneen akseleille saatiin tasainen säädettävyys, jolloin kaikki halutut kohdesijainnit saavutettiin.
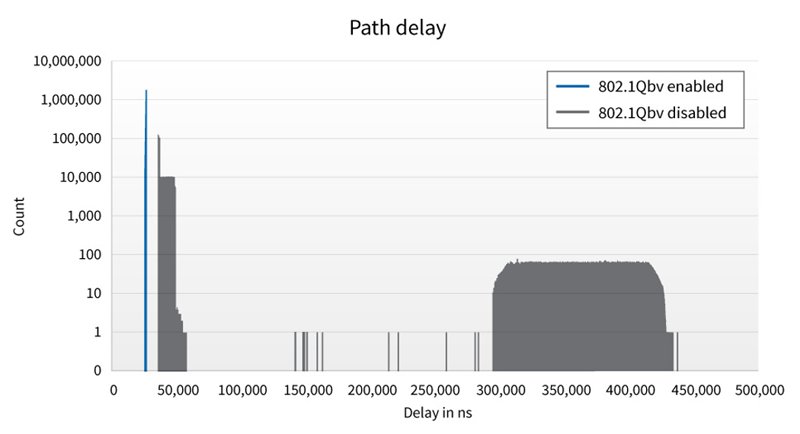
Kuva 3: Etenemisviiveen vertailu standardi-ethernetin ja gPTP- sekä IEEE 802.1Qvb -laajennuksilla varustetun TSN-ethernetin välillä.
Koska mikropiireillä TC9562 ja TC9563 on tuki gPTP:lle, IEEE 802.1Qav:lle, IEEE 802.1Qvb:lle ja muille tärkeille reaaliaikaisen säädön vaatimuksille, ne soveltuvat komponenteiksi luotettaviin auto- ja teollisuusohjauksen järjestelmiin. TC9562 tukee 1 gigabitin ethernetiä ja TC9563 laajentaa verkkokapasiteettia kahdella portilla, jotka molemmat tukevat 10 gigabitin datanopeuksia. Nopean ethernet-kapasiteetin lisäksi molemmissa komponenteissa on ominaisuuksia, jotka virtaviivaistavat tiedonsiirtoa moniytimisen isäntä-SoC:n kanssa PCIe-liitäntöjen kautta, jolloinTC9563:ssa toteutuu Gen3-ominaisuudet yhdistettynä yksireittiseen I/O-virtualisointiin (SR IOV), jonka tarkoituksena on parantaa suorituskykyä ajettaessa ohjelmistoja virtualisointiympäristössä.
Sekä autoteollisuuden että teollisuusautomaation sovellusaloilla reaaliaikaisen suorituskyvyn ja suurikaistaisen tiedonsiirron yhdistelmästä on tulossa tärkeä kilpailutekijä. Ethernetin TSN-laajennuksilla toteutetut Toshiban TC9562- ja TC9563-komponentit tarjoavat laitevalmistajille ja integraattoreille sen, mitä tarvitaan suuren kaistanleveyden omaavien reaaliaikaisten verkkotoimintojen toteuttamiseksi uusissa ajoneuvoissa ja tehdasjärjestelmissä.





 <
<









 Tekoäly on jo selkeästi ohittanut kokeiluvaiheen. Avnet Insights 2026 -selvityksen mukaan tekoäly on monilla elektroniikan aloilla jo mukana käytössä olevissa tuotteissa, ja sen soveltaminen yleistyy nopeasti kaikkialla EMEA-alueella.
Tekoäly on jo selkeästi ohittanut kokeiluvaiheen. Avnet Insights 2026 -selvityksen mukaan tekoäly on monilla elektroniikan aloilla jo mukana käytössä olevissa tuotteissa, ja sen soveltaminen yleistyy nopeasti kaikkialla EMEA-alueella.