











V2X ja esineiden internet ovat autojen seuraava teknologinen taistelukenttä. Se, miten otamme ensimmäiset kriittiset askeleet nyt määrittelee, miten nopeasti pääsemme täysin automatisoituihin robottiautoihin.
| Artikkelin ovat kirjoittaneet u-Bloxin paikannuspiireistä vastaava johtaja Thomas Nigg ja lyhyen kantaman radioiden tuotestrategiasta vastaava Costas Meimetis. |
Esineiden internet eli IoT on tullut autoihin. Kehitys alkoi viihdejärjestelmästä, mutta nyt se keittää anturifuusiota, paikannusta, mobiiliyhteyksiä ja lyhyen kantaman radiotekniikkaa jännittävien uusien V2X-arkkitehtuurien muodossa, jossa parantavat ajokokemusta ja kiihdyttävät kehitystä kohti robottiautoja.
Perustasolla V2X antaa ajoneuvojen vaihtaa kriittistä informaatiota verkon ja muiden ajoneuvojen kanssa, millä vältetään kolareita risteyksissä ja mitä voidaan käyttää lähettämään sijaintitietoa yhä useammassa maassa pakollisiin eCall-hätäpuhelupalveluihin.
Innostus liittyy kuitenkin enemmän V2X:n potentiaaliin mahdollistaa uudenlainen kognitiivisten autojen aikakausi, jona autot ovat paitsi tietoisia omasta tilastaan myös tietoisia muiden ajoneuvojen tilasta, ympäristöstä, säästä, tieolosuhteista, liikenteestä ja monista muista parametreista, jotka voivat vaikuttaa kuljettajan turvallisuuteen ja liikkumisen tehokkuuteen.
Tämä auton ”tietoisuus”, jossa aistiminen, viestiminen ja päätöksenteko tapahtuvat koneiden välisellä tasolla, vie autokuljetukset paljon viihdettä ja kallista IoT:tä pidemmälle, alueelle jota voisi kutsua ”merkittäväksi esineiden internetiksi” (“Internet of Things That Really Matter”) jossa siirrytään yhden kriittisen aistin- tai paikannuselementin käytöstä etäanalyysiin ja -päätöksentekoon. Tämä voi myös tarkoittaa katastrofia kuljettajalle ja potentiaalisesti autonvalmistajalle.
Tällä siirtymisellä kohti V2X:ää on myös luontainen seurauksensa, jossa oikeilla toimilla päästään luotettavaan, lyhyen latenssin tietoliikenteen ja luotettavien komponenttien ja moduulien käytössä voidaan päästää kohti robottiautojen Graalin maljaa, eli turvallista, luotettavaa ja täysin automatisoitua autoilua. Matkan varrella se parantaa kuljettajan turvallisuutta tiukemmin integroitujen ADAS-järjestelmien (advanced driving assistance systems) kautta, jotka estävät kolareita ja parantavat erilaisia kaupallisia tehtäviä kuten autolaivueen hallintaa.
Viihde on vasta lähtökohta
Puhtaasti teknologianäkökulmasta nettiyhteyden lisääminen autoihin viihdekäytön takia on luonnollinen ja evolutionaarinen reaktio siihen, että mobiililaitteet siirtyvät kodista autoon. Autonvalmistajat ymmärtävät, että kuluttajat haluava sitoa kodin, mobiilin ja auton viihdemaailman tiukemmin yhteen.
Scotiabank/BI Intelligencen tuoreiden lukujen mukaan 75 prosenttia vuonna 2020 myytävistä 92 miljoonasta autosta on varustettu kiinteällä nettiliitännällä. Vuositasolla tämä merkitsee 45 prosentin kasvua (kuva 1).
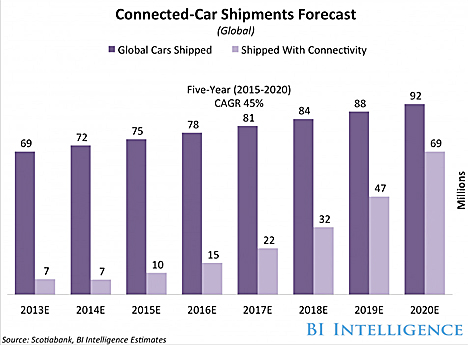
Kuva 1. Vuoteen 2020 mennessä 75 prosenttia myytävistä 92 miljoonasta uudesta autosta on varustettu internetliitännän tuovalla laitteistolla. Vuositasolla tämä tarkoittaa 45 prosentin kasvua.
Sovellukset vaihtelevat musiikin ja videon striimauspalveluista webin selaamiseen, ja liikenne- ja säävaroitusten vastaanottoon. Tämä nostaa keskimääräisen verkotetun auton hinnan luksusluokan 55 000 dollariin, vaikka hinnat tietenkin putoavat jyrkästi.
Gartner esimerkiksi ennustaa, että vuoteen 2020 mennessä maailmassa on yli 250 miljoonaa verkkoon liitettyä ajoneuvoa. Kuluttajien verkkopalveluihin kuluttama raha kaksinkertaistuu tänä aikana.
On mielenkiintoista, että BI-tutkimuslaitoksen mukaan näistä verkkoon liitetyistä ajoneuvoista vuonna 2020 vain 88 miljoonassa palvelut olisivat omistajien aktivoimia. BI arvioi kuitenkin sulautettujen liitäntöjen kasvattavat suosiotaan, sillä ne eivät vaikuta kuluttajien datakattoihin ja antavat lisäksi valmistajille mahdollisuuden saada informaatiota auton suorituskyvystä sekä lähettää OTA-päivityksiä, jolloin vältytään takaisinkutsuilta. Tämä on tärkeä ominaisuus järjestelmässä, joista on tulossa yhä monimutkaisempia kun niiden IoT-sovellusten – yksityisten, julkisten ja yrityskohtaisten – määrä lisääntyy.
Vuonna 2014 Gartner julkisti tutkimuksen, jonka mukaan IoT-laitteiden määrä nousee 25 miljardiin vuoteen 2020 mennessä (kuva 2). Näistä autoteollisuuden osuus näytti suurinta kasvuprosenttia vuonna 2015 (95 prosenttia).
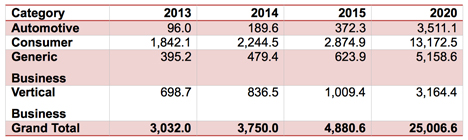
Kuva 2. IoT-laitteiden määrä kasvaa 25 miljardiin vuonna 2020. Autossa laitteiden kasvu on nopeinta.
Autoissa ja kuljetustekniikassa IoT-sovelluksia on paljon. ThingWorx, joka erikoistuu helppokäyttöiseen ja tietoturvalliseen IoT-laitteiden pilvihallintaan, käyttöönottoon ja hallintaan, korostaa useita toimintoja, joita IoT-mahdollistaa. Näihin kuuluu hätäpalveluita, autojen etädiagnostiikkaa, ajoneuvojen paikannusta ja löytämistä, turvatoimintoja ja jopa teinikuskien hallintaa. Autojen IoT-tekniikkaa voivat myös vakuutusyhtiöt käyttää ajotapojen analysointiin, turvallisten ajokäytäntöjen rohkaisemiseen ja asiakkaiden palkitsemiseen alhaisemmilla maksuilla hyvästä ajokäyttäytymisestä.
Auton diagnostiikkadatan (OBD-II) kerääminen ja lähettäminen yhdessä anturi-, sijainti- ja kuljettajainformaation kanssa on kriittistä ajoneuvolaivueen hallinnassa, jossa voidaan paikantaa rekkoja ja seurata kuljettajan tilaa sen varmistamiseksi, että rekka saa huoltoa ennen hajoamistaan. Näin voidaan myös tarkistaa, että kuljettaja on valpas ja on ajotavat vastaavat toivottuja.
Vaikka tällainen monitorointi voi tuntua ”Isoveljen” touhuilta, laivueenhallinnassa kilpailu on kovaa ja tämä voi tehdä eron menestymisen ja markkinoilta katoamisen välillä. Polttoineensäästö, automaattiset tietullit ja kaluston hajoaminen harvemmin tuovat helposti säästöjä toiminnan kokonaiskuluihin.
Monitorointi avaa myös tietä autonomisille kuljetusjärjestelmissä, jotka ovat jo näköpiirissä Googlen, Audin, Applen, BMW:n, Blackberryn, Fordin ja monien muiden ponnistelujen seurauksena. Näiden yritysten yhteenliittymät ovat jo niin tiiviitä, että on lähes mahdotonta erottaa autonvalmistajia niistä yrityksistä, jotka aiemmin kehittivät pelkkiä ohjelmistoja kuluttajalaitteisiin. Tämä ajokokemuksen omistamisesta käynnissä oleva köydenveto on mielenkiintoista seurattavaa.
BI Intelligence nostaa esiin myös IoT:n hyödyntämisen ADAS-palveluissa kuten itsestään pysäköivissä autoissa. Tämä on kuitenkin vain valtavan V2X-jäävuoren huippu (kuva 3).
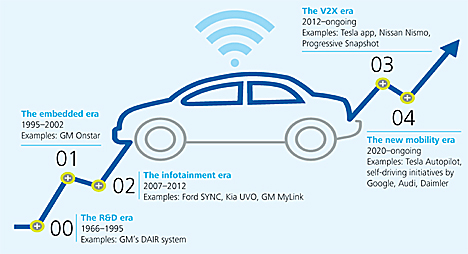
Kuva 3. Viihdejärjestelmien tuomisen jälkeen olemme nyt siirtyneet V2X-aikaan, joka yhdistää anturitekniikkaa tarkkaan paikannukseen (POS) sekä mobiili- (CEL) ja lyhyen kantaman (SHO) yhteyksiin. Yhdessä nämä aloittavat ennen näkemättömän kognitiivisen auton aikakauden.
Deloitte Consultingin tutkimusraportti elokuulta 2015 esitteli auton verkottumisen eri vaiheet alkuaikojen yrityksistä GM:n DAIR- ja OnStar-järjestelmistä Fordin SYNC:n, Kian UVO- ja GM:n MyLinkin kautta vaiheeseen 3 asti eli V2X:een. Seuraavaksi vuorossa on vaihe 4: Teslan autopilotti ja robottiautot.
V2X-teknologiat ja robottiajoneuvot
Monet V2X:n tarvitsemista tekniikoista ovat jo olemassa tai tulossa pian käyttöön laboratorioista, vaikka autoteollisuuden suunnittelusyklit tarkoittavatkin että tien päälle ne eivät ehdi vielä muutamaan vuoteen. Autoteollisuuden 3-4 vuoden suunnittelusyklejä - konseptista massatuotantoon – ei pidä sekoittaa kulutuselektroniikan sykleihin, jotka vievät aikaa 18 kuukautta tai jopa vähemmän.
Hitaampi suunnittelutahti voidaan autoteollisuudessa perustella toimimattomien laitteiden vaarallisuudella, jopa hengenvaarallisuudella. Viimeaikojen hakkerointiuutiset vain vahvistavat varovaisuuden vaatimusta. Yhdenmukaisuus standardien kuten ISO 26262:n kanssa auttava varmistamaan autojen laitteiden toiminnallisen turvallisuuden, mutta nämä testit vievät aikaa ja rahaa. Sama pätee langattomiin liitäntätekniikoihin suhteessa globaaleihin sääntelyihin.
Silti V2X-tekniikoiden sovellukset yleistyvät kovalla vauhdilla, kun kehittäjät löytävät uusia tapoja yhdistää anturidataa tarkkaan paikannukseen, mobiili- ja lähiradioyhteyksiin. Tuloksena on koko joukko ideoita ja konsepteja, jotka toteutetaan autossa ja sen ympärillä (kuva 4).
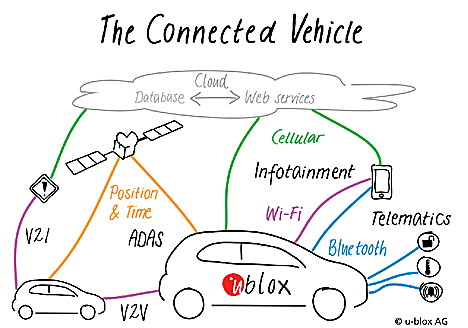
Kuva 4. IoT-yhdistetty ajoneuvo yhdistää antureita, edullista laskentatehoa, langattomia yhteyksiä, tarkkaa paikannusta ja pilvipohjaista analyysiä ja dataa, jotka realisoivat V2X:n potentiaalin.
Robottiautojen tekniikoista kaistalla pysymisessä apua tuovat ajovalot ovat mielenkiintoinen esimerkki. Ne vaativat tarkkaa paikannusta – 1 metriin tai tarkemmin - sekä kuljettajan ja muiden ajoneuvojen aikomusten oivaltamista. Tarkan paikannuksen lisäksi tämä vaatii alhaisen latenssin tietoliikennettä ohjauspyörän kanssa ja tietoa lähellä olevien muiden ajoneuvojen sijainnista ja nopeudesta. Vasta kun kaikki tämä informaatio on analysoitu, voi auton järjestelmä hyväksyä tai kieltää kaistanvaihdon.
Seuraava askel on automaattiajo moottoritiellä ja sen jälkeen robottiauto.
Tarkan sijainnin saamiseksi on käytössä useita globaaleja satelliittipaikannusjärjestelmiä, joista vain kaksi ymmärretään täysin globaaleiksi: Yhdysvaltain NAVSTAR Global Positioning System eli alkuperäinen GSP sekä Venäjän GLONASS. Muita järjestelmiä ovat Europan Galileo, Kiinan BeiDou Navigation Satellite System (BDS), Japanin Quasi-Zenith ja Intian IRNSS (Kuva 5).
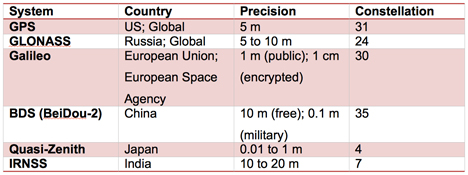
Kuva 5. Vaikka satelliittipaikannusjärjestelmiä on useita, vain kaksi on globaalisti käytettävissä ja harva tarjoaa riittävän tarkkuuden kaistanvaihtoja varten.
Vaikka järjestelmät olisivat täysin julkisessa käytössä ilman rajoituksia, tarkka paikannus vaatii usean järjestelmän yhteiskäyttöä, signaalipolkujen laskentaa, Kalman-suodatusta, monitaajuuslaskentaa ja 3D-paikkalaskentaa aiemman tarkan sijainnin perustella (ns. dead reckoning). Datalehdet yleisesti antavat lukemat tarkkuudelle paikallaan pysyttäessä, mutta todellisen paikannustarkkuuden voi arvioida vain todellisen suorituskyvyn mukaan ja sen mukaan, miten paikkatietoon integroidaan informaatiota kiihtyvyysantureista, gyroskoopeista ja nopeuden ABS-antureista.
Hyvässä toteutuksessa auto voi ajaa tunneliin ja tietää sijaintinsa 3D-paikkalaskennan avulla ilman satelliittiyhteyttä olevalla kartalla.
Onneksi paikannusjärjestelmät yleensä vastaanottavat mutta eivät lähetä signaalia, joten suunnittelijoiden ei tarvitse välittää USA:N FCC:n, Euroopan CE- tai muista radiosäteilytehoa säätelevistä määräyksistä. Paikannusvastaanottimen suhteellinen alttius muille radiolähteille on sen sijaan kriittinen tekijä.
Kun Eurooppa ja Venäjä tekevät eCall-hätäpuhelupaikannuksen pakolliseksi alle metrin tarkkuudella, ja USA tulee heti perässä, oikean paikannusvastaanottimen valinta on korkealla kaikkien autonvalmistajien prioriteettilistalla.
Käytettävissä on valmiita moduuleja, joten valmistajan suurin kysymys liittyy antennin sijoittamiseen. Hainevä-tyyppinen ratkaisu on suosituin lähestymistapa. Siinä antenni asennetaan auton päälle ja koaksiaalikaapeli kulkee päätelematiikkayksikköön (TCU). Siitä signaali voidaan siirtää ethernetillä, langattomasti tai CAN-väylää pitkin kojetauluun ja takaistuinten näyttöihin. Joissakin tapauksissa koko elektroniikka voidaan siirtää auton katolle, jolloin säästetään kalliissa RF-kaapeleissa. Tämä edellyttää sellaisten komponenttien käyttöä, joissa on laajennettu lämpötila-alue (kuva 6).
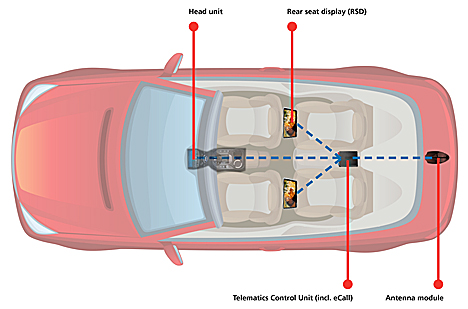
Kuva 6. Radion ja paikannusjärjestelmän antennit pitää liittää koaksiaalikaapelilla auton TCU-yksikköön, mutta yhä useammin käytetään halvempia digitaalisia kaapeleita, jolloin kaikki antennit on integroitu hainevään (tai peileihin).
Vaikka perinteisesti on käytetty koaksiaalikaapelia, kaiken radioelektroniikan integroiminen hainevään tai sivupeileihin (hajautetussa järjestelmässä) mahdollistaa edullisempien digitaalisten kaapelien käytön. TCU-yksikön pitää tällöin kestää -40 - +105 asteen lämpötilat.
Muihin lähetinvastaanottimiin kuuluvat wifi ja vähävirtainen bluetooth eli BLE, sekä mobiiliverkkojen modeemi. Vaikka nämä liitännät ovat hyviä datansiirtoon, V2V- ja V2X-liikenteen edellyttääm alhainen latenssi on siirtänyt painopisteen 802.11p-radioiden integroimiseen.
802.11p on lisäys 802.11- eli Wi-Fi-standardiin, joka mahdollistaa datansiirron nopeasti kulkevien ajoneuvojen välillä ja tienvarsilla käytettävällä 5,9 gigahertsin (5,85-5,925 GHz) ITS-alueella. Se vaatii täysin oman fyysisen kerroksen ja siten myös oman radionsa. Vaikka tämä tarkoittaa suurempia laitekustannuksia ja yhteensopivuutta ohjelmiston ja lainsäädännön kanssa, iso osa kustannuksista voidaan pienentää käyttämällä moduuleja.
Modulaarinen lähestymistapa on mielenkiintoinen myös amerikkalaisten operaattorien näkökulmasta, sillä ne vaativat täydellistä yhdenmukaisuuden testaamista ennen kuin laite voidaan liittää heidän verkkoonsa. Näin varmistetaan, ettei laite aiheuta mitään ongelmia. Lakisääteisesti samaa ei Euroopassa vaadita.
 Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.
Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.


















