








 Robottiautoja kehitetään nyt kovaa vauhtia. Suomessakin VTT:n Martti saa koko ajan lisää testikilometrejä. Yksi iso haaste robottiautoille on se, miten ne pystyvät toimimaan sumussa tai lumisateessa. MIT:ssä kehitetty piiri saattaa ratkaista nämä ongelmat.
Robottiautoja kehitetään nyt kovaa vauhtia. Suomessakin VTT:n Martti saa koko ajan lisää testikilometrejä. Yksi iso haaste robottiautoille on se, miten ne pystyvät toimimaan sumussa tai lumisateessa. MIT:ssä kehitetty piiri saattaa ratkaista nämä ongelmat.
Robottiautojen ongelma on se, että ne käyttävät navigointiinsa muiden tielläliikkujien kanssa valoon perustuvia tekniikoita, kuten infrapunaa hyödyntäviä LiDareita. Monissa olosuhteissa nämä tekniikat lakkaavat toimimasta riittävällä luotettavuudella.
Massachusetss Institute of Technologyn kehittivät piirin, joka toimii mikroaaltojen ja infrapuna-alueen välissä, ns. terahertsialueen alapuolella. Kohteiden havaitsemisessa piiri lähettää signaalin ja vastaanotin mittaa heijastuksen takaisin tulevista aalloista. Signaalin perusteella prosessori pystyy muodostamaan kuvan kohteesta.
Tällaisen terahertsialueen alapuolella toimivan lähettimen toteuttaminen robottiautoon on iso haaste. Herkkä kohteiden tunnistaminen edellyttää voimakasta lähtösignaalia vastaanottimelta prosessorille. Tähän asti tällaisen järjestelmän rakentaminen on vaatinut erillispiirejä, joilla järjestelmistä on tullut liian kookkaita ja kalliita. Yhdelle sirulle integroitujen järjestelmien tuottama signaali on puolestaan ollut liian heikko.
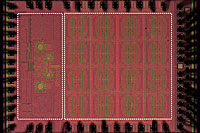
MIT:n tutkijoiden kehittämä piiri on kertaluokkia aiempia ratkaisuja herkempi. Se osaa siis tulkita paremmin terahertsien alaisen taajuusalueen aallonpituuksia, vaikka signaalissa olisi paljon kohinaa. Ratkaisu perustuu useiden detektorien integroimiselle samalle sirulla. 32 pikselin matriisi saatiin protopiirillä 1,2 neliömillin kokoon. Pikselit ovat samalla noin 4300 kertaa herkempiä kuin tämän hetken terahertsialueen alapuolella toimivat parhaat anturit.
Tekniikka vaatii edelleen kehitystä, mutta se on lupaava ratkaisemaan robottiautojen ongelmat.
















 Lääkintälaitteiden internet (IoMT) yhdistää diagnostiikan, puettavat anturit ja sairaalalaitteet pilvipohjaisiin järjestelmiin. Etävalvonta, reaaliaikainen data ja koneoppiminen lupaavat parempaa hoidon laatua ja kustannussäästöjä, mutta samalla ratkaistavaksi jäävät yhteentoimivuus, sääntely ja tietoturva.
Lääkintälaitteiden internet (IoMT) yhdistää diagnostiikan, puettavat anturit ja sairaalalaitteet pilvipohjaisiin järjestelmiin. Etävalvonta, reaaliaikainen data ja koneoppiminen lupaavat parempaa hoidon laatua ja kustannussäästöjä, mutta samalla ratkaistavaksi jäävät yhteentoimivuus, sääntely ja tietoturva.