











Automaation etuja halutaan hyödyntää yhä useammilla aloilla. Tämä taas kasvattaa merkittävästi sähkömoottorien ja niiden ohjausjärjestelmien kysyntää. Suunnittelijoiden haasteena on luoda innovaatioita yhä nopeammassa kehitysaikataulussa, mikä tekee oikeantyyppisen ohjausjärjestelmän valinnasta ensiarvoisen tärkeää.
| Artikkelin kirjoittaja Steve Ikei toimii ON Semiconductorin moottorinohjaustuotteiden markkinointipäällikkönä. |
Tutkimuslaitos Grand View Researchin1 laatiman ennusteen mukaan sähkömoottorien maailmanmarkkinat kasvavat 155 miljardiin dollariin vuoteen 2025 mennessä. Useat eri sektorit ajavat tätä kehitystä eteenpäin, muun muassa teollisen tuotannon automatisointi. Moottorit, toimilaitteet ja niiden ohjaimet ovat automatisoitujen järjestelmien kriittisiä komponentteja.
Yksi nopeasti kehittyvä sähkömoottorien markkinasektori on sähköautojen (EV) valmistus, jota kaikki merkittävät autonvalmistajat ajavat voimalla eteenpäin. Kansainvälisen energiajärjestön (IEA) tuoreimman markkinatutkimuksen (Global EV Outlook 20182) mukaan sähköautojen maailmanlaajuinen myynti ylitti viime vuonna miljoonan kappaleen rajan (1,1 miljoonaa), mistä Kiina vei 40 prosenttia. Tutkimusraportissa IEA ennustaa, että myytyjen sähköautojen määrä voi ylittää 220 miljoonan kappaleen rajan vuoteen 2030 mennessä.
Sähkömoottorin ohjausjärjestelmä on tärkeä osa, joka varmistaa moottorin toiminnan mahdollisimman korkealla hyötysuhteella alhaisen energiankulutuksen varmistamiseksi. Ohjausjärjestelmien tärkeys korostuu kaiken aikaa, ja suunnittelijat joutuvat kaupallisten paineiden alaisena kehittämään järjestelmiä niin, että ne täyttävät mahdollisimman hyvin monet tiukat vaatimukset. Näitä ovat muun muassa erittäin vähäinen energiankulutus ja ympäristönkuormitus. Ne pitää kuitenkin saavuttaa täyttämällä sovelluskohteiden kovat vaatimukset joustavuudesta ja vankasta rakenteesta.
Kehityshaasteita
Kaikkien sähkömoottorien toimintaperiaate on samankaltainen: kun sähkövaraus syötetään käämiin (staattoriin), siitä tulee sähkömagneetti. Staattori puolestaan on sijoitettu useiden magneettien muodostamaan magneettikenttään, jonka napaisuus on vastakkainen. Magneetit muodostavat yhdessä akselille sijoitetun roottorin.
Kun sähkömagneettiin syötettävän varauksen napaisuutta vaihdellaan nopeasti kommutaattorin avulla, moottorin akseli saadaan pyörimään. Tämä liike on moottorin lähdöstä saatava mekaaninen perusenergia. Moottoritekniikan edistyessä on kehitetty useita erilaisia moottorirakenteita, joita on vielä paranneltu jatkuvasti.
Nykyään tarjolla on lukuisia moottorityyppejä, jotka luokitellaan joko tasavirtamoottoreiksi (DC) tai vaihtovirtamoottoreiksi (AC). Vaihtovirtamoottorit ovat tyypiltään joko synkronisia tai epäsynkronisia eli induktiomoottoreita. Niiden perusero on se, että synkroninen vaihtovirtamoottori tarvitsee DC-teholähteen energian syöttämiseksi roottorille, kun taas epäsynkroninen AC-moottori ei tarvitse ylimääräistä teholähdettä. Automaatiosovelluksissa yleisesti käytetty AC-moottorityyppi on reluktanssiltaan säädettävä vaihtovirtamoottori, sillä sitä voidaan käyttää askelmoottorin tavoin.
Tasavirtamoottorit (tyypillisesti harjattomat BLDC-moottorit) ovat myös tulleet hyvin suosituiksi, sillä niiden hyötysuhde on erittäin korkea. BLDC-moottorissa kestomagneetit on sijoitettu roottoriin, ja sähkömagneetit sijaitsevat staattorissa. Askelmoottori puolestaan on DC-moottorin muunnelma, jonka roottori koostuu lukuisista magneeteista, jotka muistuttavat hammasrattaan hampaita. Tämän ansiosta moottorin rotaatiokulmaa voidaan säätää erittäin tarkasti halutun mekaanisen lähdön aikaansaamiseksi.
Askelmoottorit (yksi- tai kaksinapaiset), harjalliset DC-moottorit ja servomoottorit ovat automaatiosovellusten yleisimpiä moottorityyppejä, joihin voi törmätä esimerkiksi ajoneuvoissa ja roboteissa. Asynkroniset (induktio-) ja synkroniset (kestomagneetti-) moottorit ovat myös yleisiä, sillä ne ovat rakenteeltaan lujia ja hinnaltaan edullisia. Mihin tahansa sovellukseen käytettävissä olevat moottorityypit ovat kehittyneet siihen pisteeseen, että suunnittelijoilla on nykyään useita eri vaihtoehtoja, joista valita.
Digitaalinen moottorinohjaus tulee jatkuvasti yhä suositummaksi, koska ohjausyksikkö voidaan silloin sijoittaa hyvin lähelle moottoria ja käyttösovellusta. Sellaisten moottorien, joiden on toimittava tarkasti tietyillä kierroksilla – esimerkiksi kompressorien ja pumppujen - nopeutta voidaan säätää entistä tarkemmin käyttämällä digitaalista ohjausjärjestelmää. Digitaalinen ohjaus voi olla tehokas tapa myös nopeudeltaan vaihteleville moottoreille, joiden kierrosnopeus on suoraan verrannollinen ohjaustaajuuteen.
On tärkeää ymmärtää, että moottorisovellusten kehittyessä niiden ohjausjärjestelmienkin pitää kehittyä. Kehittäjillä tulee olla käytettävissä tehokas ja joustava moottorinohjausjärjestelmän suunnitteluympäristö, joka tarjoaa kattavan työkaluvalikoiman helpottamaan iteratiivista suunnittelua ja prototyyppien nopeaa tekoa.
Uusia ratkaisuja
Sähkömoottoria hyödyntävien sovellusten yleistyessä DC-moottoreita käyttävät suunnittelijat hyötyvät joustavasta ohjausmekanismista, jota voidaan käyttää kehitystyön perustana. Ilman todellista moottoria tapahtuvassa kehitystyössä mahdollisimman hyvää hyötysuhdetta tavoittelevat suunnittelijat tarvitsevat joustavan kehitysympäristön, johon voi luottaa.
ON Semiconductorin kehittämä moottorinohjausmoduulin kehityssarja (LV8548MCSLDGEVK) tarjoaa suunnittelijoille uuden intuitiivisen ratkaisun ohjausjärjestelmän rakentamiseksi. Se sisältää perustoimintoina moottorin eteen- ja taaksepäin ohjauksen sekä jarrutuksen täyteen siltamuotoon kytketyille kaksiharjaisille DC-moottoreille sekä yksinapaisille askelmoottoreille. Moottorinohjaimesta on tällä hetkellä saatavissa kolme eri versiota askel- ja harjamoottoreille.
Tämän vuoden loppuun mennessä valikoimaan on tulossa lisäksi kaksi uutta versiota harjattomien BLDC-moottorien ohjaukseen. Kukin moduuli voidaan yksinkertaisesti vain kytkeä peruspiirikortin liittimeen, mikä tarjoaa kehittäjille joustavan ympäristön moottorinohjausjärjestelmien suunnitteluun.
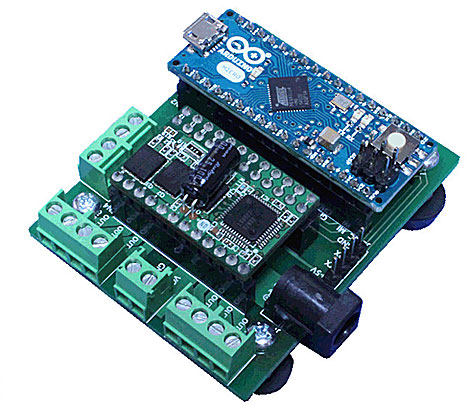
Kuva 1: ON Semiconductorin kehityssarja moottorinohjausmoduulin suunnittelua varten.
Suoraan liittimeen kytkettävä moottorinohjausmoduuli tarjoaa esisuunnitellun laitteen valmiina moduulina, joka perustuu avoimeen arkkitehtuuriin ja on valmis asiakasräätälöintiä varten.
Isäntätietokoneen ja Arduino MICRO*1 -ohjainkortin välinen USB-liitäntä antaa mahdollisuuden DC-moottorin ohjaamiseen sarjamuotoisella viestinnällä. Kehitysjärjestelmä koostuu Arduino IDE 1.8.4. -ohjelmistoa ajavasta Windows-PC:stä, ohjainkortista ja AC-sovittimesta, jonka lähtöjännite on 4 – 16 volttia ja lähtövirta noin 2 ampeeria.
Ohjelmisto sisältää API-kirjaston ja monille suunnittelijoille kaikkein tärkeimpänä tehokkaan graafisen käyttöliittymän (GUI), joka kykenee automaattisesti tuottamaan Arduino-koodia, jota voidaan siirtää Arduino Sketch -tiedostoina (.ino). Tätä koodia voidaan käyttää myös Arduino IDE -ohjelmiston kanssa.
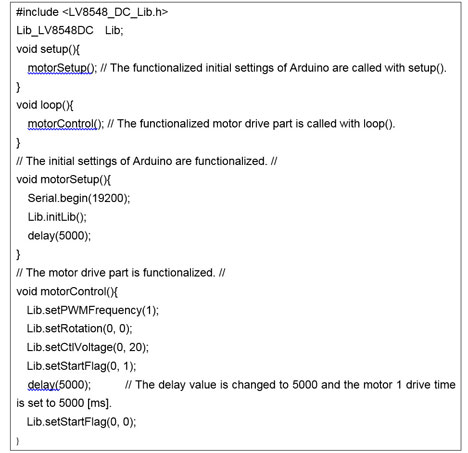
Kuva 2: Automaattisesti tuotettu koodiluonnos.
Graafinen käyttöliittymä tukee kaikkia moottorinohjauspiirejä ja lukuisia eri moottorityyppejä kuten BLDC-moottoreita, askelmoottoreita ja harjallisia tasavirtamoottoreita. Sen tarjoama keskeinen ominaisuus on suunnittelutyön korkeatasoinen intuitiivisuus.
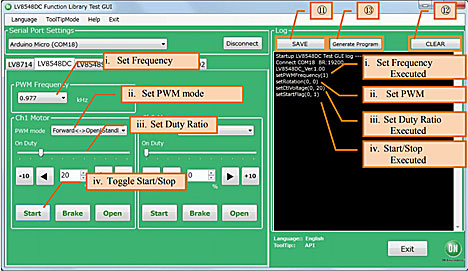
Kuva 3: Graafisen käyttöliittymän ikkuna.
Ohjausjärjestelmiä luodessaan suunnittelijat saavat apua ja vihjeitä näyttöruudulta, kun taas kattavat API-kirjastot tarjoavat yksityiskohtaisia toimintoja, jotka voidaan sisällyttää moottorinohjaimeen testaamista varten.
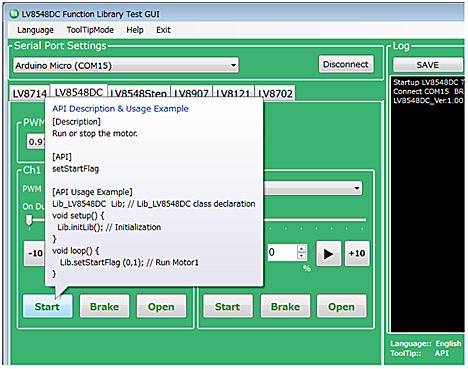
Kuva 4: Graafisen käyttöliittymän Tool Tip -näyttö.
Koska kehityssarja voi tukea erilaisiin moottoreihin perustuvia suunnitelmia, käyttäjän ruudulla näkemä käyttöliittymä (ON Motor Solution GUI) muuttuu aina kuhunkin käytettävään moottorityyppiin sopivaksi. Käyttöliittymä tukee helppoa parametrien asettamista ja ohjauspiirin konfigurointia tarvitsematta jatkuvasti seurata käsikirjojen ohjeita.
Käytännössä kehittäjät voivat luoda sovelluksia ilman yksityiskohtaisia tietoja käytettävästä moottorityypistä. Tämä nopeuttaa moottorinohjaimen suunnitteluprosessia tehokkaan ja nopean kehitysympäristön ansiosta. Esimerkiksi moottorinohjaimen API-kirjaston funktiota ”setTargetSpeed()” voidaan käyttää ohjaamaan harjallisille tasavirtamoottoreille tarkoitettua LV8548-ohjainpiiriä asettamalla vain kohteelle haluttu kierrosnopeus.
Suunnittelijoille LV8548MC-ohjainpiiri antaa Arduino-tietokoneen kautta mahdollisuuden erittäin korkeatasoiseen ohjaukseen ja tarjoaa lisäksi kehittyneitä vianhakutoimintoja, jotka eivät vaadi ylimääräisiä ohjelmistotyökaluja. Tämä on tärkeää, sillä kehitystyötä tekevät insinöörit voivat käyttää suoraan hyllystä löytyviä vakiokomponentteja toimivien ohjainprotojen rakentamiseen hyvin lyhyessä ajassa.
Potentiaali erilaisiin automaatiosovelluksiin on käytännössä rajaton, kuten käy ilmi tästä blogista, joka esittelee videon kera robottikäden ohjaamista:http://www.onsemi.com/community/blog/post/Robotic-Hand-Demo-with-Motor-Driver-Solutions-Kit
Lisätietoja Motor Drive Solutions Kit -kehityssarjasta löytyy osoitteesta:
Kun järjestelmien suunnitteluajat jatkuvasti lyhenevät, tämän kaltaiset työkalusarjat ovat entistä tärkeämpiä, jotta suunnittelijat voivat innovoida uusia tuotteitaan nopeasti ja tehokkaasti.
LÄHTEET
[1] Grand View Researchin tutkimus
https://www.grandviewresearch.com/press-release/global-electric-motor-market
[2] Global EV Outlook 2018 -tutkimus
https://www.connaissancedesenergies.org/sites/default/files/pdf-actualites/globalevoutlook2018.pdf


 Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.
Tekoäly siirtyy pilvestä koneisiin, kameroihin, antureihin ja robotteihin. Reunalla yksi laitteistoratkaisu ei kuitenkaan sovi kaikkeen, vaan suorituskyky on sovitettava mallin, datan ja käyttökohteen mukaan.












